重载型摩擦力操作手柄
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及工业遥控领域,具体涉及重载型摩擦力操作手柄。
背景技术
在工程机械中,工业遥控控制杆是十分重要的部件,不仅解决了人工不能现场操作的难题,又提高了机械的集成度,推动整个社会的工业自动化。由于工业手柄使用频繁且该部件需要有较高的可靠性、耐用性,同时能够适应特殊工况的使用要求。
重载型操作手柄常需要较高的安全性,操作过程中位了防止手柄移位,需要对手柄进行限位,常规手柄在限位的同时会增大操作的难度,耗费较大的力气,则不符合人体工学设计;同时,一套手柄装置不容易匹配多套操作方式。
发明内容
针对现有技术的不足,本发明提供了重载型摩擦力操作手柄,克服了现有技术的不足,设计了一种利用波形弹簧对操作手柄限位的结构,和限位板与操作面板共同配合的操作装置,满足了相同装置可使用多种操作系统的需要。
为实现以上目的,本发明通过以下技术方案予以实现:
重载型摩擦力操作手柄,包括面板、摇棒,所述面板上设置有贯穿的面板通槽且面板外侧端面上安装有限位板,限位板上设置有导向槽;
所述面板直接或间接与第一支撑板、第二支撑板一端装配固定;第一支撑板、第二支撑板分别与转轴可圆周转动、轴向滑动装配;所述转轴上分别设置有安装槽、摩擦盘,摇棒一端穿过导向槽、面板、安装槽,铰接轴穿过第三支撑板上的第三轴孔、转轴后与摇棒铰接;
所述第三支撑板安装在基座上,基座套装在转轴上,且基座内侧设置有锁紧槽,所述锁紧槽内安装有第二摩擦板、摩擦盘、波形弹簧、第一摩擦板,所述第二摩擦板、波形弹簧、第一摩擦板分别套装在转轴上且可与之轴向滑动装配,所述波形弹簧安装在第一摩擦板和压板之间。
优选地,导向槽包括中位槽、第一导向槽、第二导向槽,所述第一导向槽、第二导向槽分别位于中位槽两侧,所述中位槽与摇棒的中位对应;面板与导向槽对应处设置有贯穿的面板通槽。
优选地,所述第一支撑板、第二支撑板另一端通过铜柱连接固定。
优选地,所述第一支撑板、第二支撑板上分别设置有第一轴孔、第二轴孔,所述第一轴孔、第二轴孔内部分别安装有第一轴套、第二轴套,所述第一轴套、第二轴套分别与限位转轴两端套装。
优选地,所述第二支撑板外侧安装有PCB板,PCB板上安装有霍尔传感器,转轴靠近第二支撑板一端上安装有磁铁;PCB板安装在外壳内,外壳固定在第二支撑板上。
优选地,第一轴套穿过压板后与第一轴孔装配。
优选地, 所述第一摩擦板、第二摩擦板分别与锁紧槽卡合装配,所述第一摩擦板、第二摩擦板的端面均超出摩擦盘的端面。
优选地,所述摇棒一端穿过导向槽、面板通槽、安装槽后与微动开关的触发片正对;所述微动开关安装在第一支撑板底部,且在摇棒进入中位槽时,摇棒底部对触发片施压以使得触发片触发微动开关。
优选地,所述第二支撑板与摇棒之间安装有扭转弹簧,扭转弹簧一端与第三支撑板固定、另一端与摇棒压紧,扭转弹簧用于保持摇棒处于中位槽处。
优选地,所述中位槽、第一导向槽、第二导向槽宽度均大于摇棒的直径;所述第一支撑板、第二支撑板分别固定在固定板上,固定板与面板装配固定。
本发明提供了重载型摩擦力操作手柄,具备以下有益效果:
1.可对摇棒进行限位,通过波形弹簧对满足摇棒在操作过程中的任一位置的固定,摇棒移动带动转轴内的磁铁转动,PCB板输出的模拟量信号值发生变化;
2.波形弹簧的回弹方向与摇棒的移动方向垂直,波形弹簧对摇棒是通过摩擦力进行限定的,扳动摇棒时,不会对摇棒产生较大的阻力,符合人体工学。
3.摇棒在限位板和操作面板的滑槽内滑动,更换的限位板即可获得不同的操作方式,满足不同人的使用习惯。
4.冗余安全保护设计,同时配置机械锁和电子锁,波形弹簧、扭转弹簧及微型电子的共同限制,同时对装置进行安全保护。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
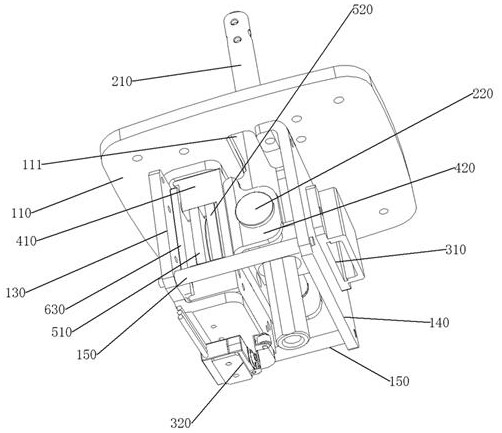
图1 为本发明的结构示意图。
图2 为本发明的结构示意图。
图3 为本发明的结构示意图。
图4 为图3中A-A剖视图。
图5 为图3中B-B剖视图。
图6为本发明的零件爆炸图。
图7为本发明的零件爆炸图。
图8为本发明的零件爆炸图。
图9为本发明的零件爆炸图。
图10为图9中C-C剖视图。
具体实施方式
为使本发明目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
如图1-10所示,一种重载型摩擦力操作手柄,包括面板110、摇棒210,所述面板110上设置有贯穿的面板通槽且面板110外侧端面上安装有限位板120,限位板120上设置有导向槽,本实施例中导向槽包括中位槽121、第一导向槽122、第二导向槽123,所述第一导向槽122、第二导向槽123分别位于中位槽121两侧,所述中位槽121与整个手柄的中位对应;面板110与导向槽对应处设置有贯穿的面板通槽111。
所述面板110直接或间接与第一支撑板130、第二支撑板140一端装配固定,所述第一支撑板130、第二支撑板140另一端通过铜柱150连接固定;
所述第一支撑板130、第二支撑板140上分别设置有第一轴孔131、第二轴孔141,所述第一轴孔131、第二轴孔141内部分别安装有第一轴套610、第二轴套620,所述第一轴套610、第二轴套620分别与限位转轴230两端套装;
所述第二支撑板140外侧安装有PCB板,PCB板安装在外壳310内,外壳310固定在第二支撑板140上,PCB板上安装有霍尔传感器,转轴230靠近第二支撑板140一端上安装有磁铁。使用时,转轴转动,从而使得磁铁在转轴圆周方向上产生位移,而霍尔传感器通过检测磁场变化而改变输出信号,从而达到通过摇棒的转动改变输出信号的目的。优选地,所述PCB板通过环氧树脂密封在第二支撑板140、外壳310之间,从而实现PCB板的密封、防水、防尘等功能。
所述转轴230上分别设置有安装槽231、摩擦盘232,所述摇棒210一端穿过导向槽、面板通槽111、安装槽231后与微动开关320的触发片正对,铰接轴220穿过第三支撑板420上的第三轴孔421、转轴230后与摇棒210铰接,从而实现摇棒210与转轴230之间的安装、铰接;
所述第三支撑板420安装在基座410上,基座410套装在转轴230上,且基座410内侧设置有锁紧槽412,所述锁紧槽412内安装有第二摩擦板520、摩擦盘232、波形弹簧530、第一摩擦板510,所述第二摩擦板520、波形弹簧530、第一摩擦板510分别套装在转轴230上且可与之轴向滑动装配,所述波形弹簧530安装在第一摩擦板510和压板630之间,第一轴套穿过压板630后与第一轴孔131装配从而实现在第一轴孔131轴向上相对固定压板630;
所述波形弹簧530用于在第一摩擦板510和压板630间距变小时产生弹性变形,从而存储弹力、产生弹性阻尼。所述基座410安装、固定在第一支撑板130内侧的基座安装槽132内,且所述基座410靠近压板630一端的端面上设置有限位边缘411,所述压板630与基座安装槽132内侧壁之间构成限位环槽101,所述限位环槽101与限位边缘411卡合装配,从而限制基座410与基座安装槽132安装的最大位置;
所述第一摩擦板510、第二摩擦板520的端面均超出摩擦盘232的端面,这种设计主要是防止转轴转动时,摩擦盘与基座410产生接触,影响转轴的正常转动,同时也保护摩擦盘232。
所述微动开关320安装在第一支撑板130底部,且在摇棒210进入中位槽121时,摇棒底部会对触发片施压,从而使得触发片触发微动开关320,此时判断为处于中位状态。需要在非中位状态调节摇棒时,首先将摇棒210以铰接轴220为中心转动,使得摇棒210进入第一导向槽122或第二导向槽123内,在此过程中摇棒210驱动转轴230轴向向波形弹簧530移动,从而挤压波形弹簧530,波形弹簧530受压存储弹力,第一摩擦盘510通过波形弹簧530的弹力向摩擦盘232压紧,从而对转轴的圆周转动产生阻力,这种设计使得摇棒可以在任一位置锁止、固定,从而实现摇棒的限位、锁定。另外摇棒一旦脱离中位槽121后,微动开关得出触发随之解除,手柄开始进行信号输入。这种设计可以使得手柄在中位时处于低功耗的待机状态,以降低能耗。本实施例中可以在PCB板上安装MCU,MCU的信号端分别与霍尔传感器、微动开关的信号端通讯连接,从而通过MCU解析霍尔传感器获得的信号、判断微动开关是否被触发。且MCU可与外部装置通讯连接,从而实现将摇棒输入的信号转为换电信号后输出。
优选地,所述第一摩擦板510、第二摩擦板520分别与锁紧槽412卡合装配,从而使得第一摩擦板510、第二摩擦板520不能随着摩擦盘圆周转动。
优选地,所述第二支撑板420与摇棒210之间安装有扭转弹簧430,扭转弹簧430一端与第三支撑板420固定、另一端与摇棒210压紧或固定,扭转弹簧430用于保持摇棒210处于中位槽121处,一旦摇棒脱离中位槽121,则扭转弹簧430受压而存储弹力,一旦摇棒的阻力消失,扭转弹簧会驱动摇棒恢复至中位槽121处,也就是实现摇棒的自动复位。
所述中位槽、第一导向槽、第二导向槽宽度均大于摇棒的直径,从而使得摇棒可以在中位槽、第一导向槽、第二导向槽的宽度方向上(摇棒直径方向)晃动。在摇棒位于第一导向槽、第二导向槽内时,由于摩擦盘、第一摩擦板、第二摩擦板之间的摩擦力,扭转弹簧不能驱动摇棒复位,而且摇棒也通过这个摩擦力自锁,但是这个摩擦力不影响摇棒驱动转轴转动。在摇棒需要复位时,将摇棒向中位槽方向掰动,使得波形弹簧的受压状态解除,此时扭转弹簧通过自身弹力驱动摇棒复位即可。
本装置具有冗余安全保护设计,同时配置机械锁(波形弹簧和扭转弹簧)和电子锁(微动开关),波形弹簧、扭转弹簧及微动开关与摇棒的配合,同时对装置进行安全保护、锁紧、检测摇棒是否位于中位。由于波形弹簧10的回弹方向与摇棒12的移动方向垂直,波形弹簧10对摇棒12是通过摩擦力进行限定的,扳动摇棒12时,不会对摇棒12的移动产生较大的阻力,符合人体工学。在实际使用时,可以通过不同的导向槽设计获得不同的操控方式及操控角度,从而满足使用中的更多需求。本实施例中,直接设置多种规格导向槽的限位板,通过更换限位板即可。
优选地,所述第一支撑板130、第二支撑板140分别固定在固定板160上,固定板160与面板110装配固定,这种方式为第一支撑板130、第二支撑板140的间接装配。当然第一支撑板130、第二支撑板140可以直接安装在面板上,从而去除固定板160。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 重载型摩擦力操作手柄
- 重载型摩擦力操作手柄