一种倾转旋翼无人机发动机控制系统
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及无人机飞行控制领域,具体地说是一种倾转旋翼无人机发动机控制系统。
背景技术
倾转旋翼飞行器在保证固定翼高速巡航的前提下,兼具旋翼飞行器的垂直起降能力,起降受场地限制较小,有很高的灵活性,在军事方面具有广阔的应用领域。美国先后继续研制出XV-15,V-22等系列倾转旋翼机,其中V22在机翼两端各有一倾转机构,推动旋翼向上或向前,分别用于直升机垂直起降或悬停以及固定翼飞行阶段。倾转旋翼无人机的发展较晚,基于V22“鱼鹰”有人驾驶倾转旋翼机的基础上,美国贝尔实验室研制的V247无人机日前在两栖攻击舰上完成了起降。该无人机将用于执行查证识别目标、导弹通信中继、校正对岸攻击、毁伤效能评估、协助临检拿捕等。
倾转旋翼无人机包括三种模态:直升机模态、固定翼模态以及倾转模态。在每个模态下,发动机工作状态均不同,特别是倾转模态下,无人机在直升机与固定翼状态进行转换,若发动机存在匹配不当的情况,整机飞行姿态稳定性会有很大的风险。因此发动机控制系统在倾转旋翼无人机整个飞行任务中起到非常重要作用。
目前,国际上越来越多的研究机构相继开展倾转旋翼无人机的研究,我国目前也开展此类无人机的研究,在发动机控制系统上,也取得了一些研究成果。但是这些研究都是在小型电动无人机模型上建立的,不能用于油动无人机。油动系统在响应、匹配上与电动机有着很大的不同,在倾转过渡态上,油动系统受到限制很多;另外传统的PID系统超调与稳态性能之间存在矛盾,因此需要进行更系统的研究。
发明内容
针对现有技术的不足,本发明提供一种倾转旋翼无人机发动机控制系统,实现倾转无人机发动机控制系统,实现无人机在执行空中任务过程中的发动机监控,从而达到无人机在全状态下安全稳定运行的目的。
本发明为实现上述目的所采用的技术方案是:一种倾转无人机发动机控制系统,包括:
信息采集模块,用于通过串口获取发动机转速,并发送至控制模块,将发动机控制率通过串口发出,进而控制发动机转速;
控制模块,用于根据接收的发动机转速,通过滑膜控制器得到发动机控制率,输出至信息采集模块。
所述信息采集模块包括主处理器以及与其连接的RS232串口、RS485串口,CAN总线;
所述主处理器,用于通过RS485串口接收发动机ECU反馈的发动机转速,通过RS232串口发送至控制模块,并通过RS232串口接收控制模块发来的发动机控制率,经RS485串口发送至发动机ECU;通过CAN总线与发动机备用ECU连接。
所述滑膜控制器的切换函数具有以下比例+积分+微分的形式:
其中,s(σ)表示切换曲面,k
所述滑膜控制器输出的发动机控制率u如下:
其中,α、β分别为趋近律参数,其中α>0,β>0;k为饱和函数的比例系数;k
一种倾转无人机发动机控制方法,包括以下步骤:
信息采集模块通过串口获取发动机转速,并发送至控制模块;
控制模块根据接收的发动机转速,通过滑膜控制器得到发动机控制率,输出至信息采集模块;
信息采集模块将发动机控制率通过串口发出,进而控制发动机转速。
本发明具有以下有益效果及优点:
1.实现对发动机输出功率的精准控制;
2.实现对发动机状态的检测,保证发动机工作在安全状态;
3.实现发动机与航电系统之间的通信,发动机的各项参数及控制指令可以通过航电系统下传到地面控制器;
4.使发动机工作在合理状态,降低燃油消耗量,提高无人机空中滞留时间。
附图说明
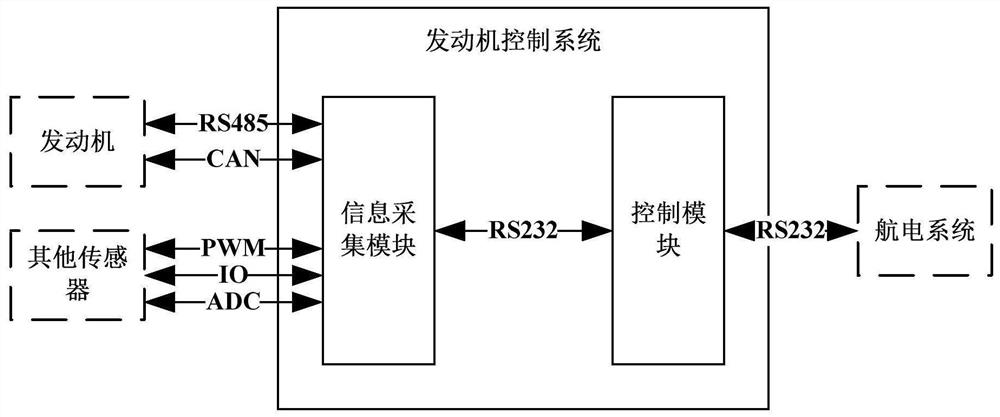
图1是本发明的系统结构图;
图2是本发明的信息采集模块结构图;
图3是本发明的信息采集模块软件流程图;
图4是本发明的控制模块结构图;
图5是本发明的控制模块软件流程图;
图6是倾转旋翼无人机飞行任务谱。
具体实施方式
下面结合附图及实施例对本发明做进一步的详细说明。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但本发明能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
本发明系统控制组成是:
一种倾转旋翼无人机发动机控制系统,包括信息采集模块与控制模块两部分,参见图1。控制模块根据信息采集模块得到的发动机各项参数,指定合理的控制规律,控制发动机工作状态,以适应无人机在直升机模式、固定翼模式以及直升机与固定翼之间的过渡模式。具体为:
信息采集模块主要采集发动机各项参数,以及与发动机ECU系统、控制模块的信息交互。信息采集模块由电源管理、主处理器、接口电路等部分组成,如图1所示,主处理器选用FPGA。模块包括6种接口形式,分别是RS232数据通信接口、RS485数据通信接口、CAN接口、IO接口、PWM接口以及模拟数据采集接口(ADC)。RS232接口用于与控制模块的通信;RS485接口用于主处理器与发动机ECU的通信。CAN接口用于主处理器与发动机ECU的备用通信。PWM波接口用于舵机的控制。模数转换器(ADC)用于模拟电压或电流量的采集。继电器接口主要是实现与外部继电器设备的控制。
信息采集模块采用Verilog语言设计。包括程序自检部分、数据采集部分、外部设备控制、数据通信部分。软件运行流程参见图2.
程序自检部分由开机自检测及飞行中自检测两个功能组成。
(1)开机自检测
上电开机后,先检查模块自身各部分功能是否具备,工作是否正常。
(2)飞行中自检测
上电开机后,根据航电系统下发的自检指令,检查电路自身各部分功能是否具备,工作是否正常。
数据采集部分包括对油位计、液位计、热敏电阻等外部传感器模拟量的采集。通过FPGA控制ADC工作,实现对模拟信号的采集。可以调整射随放大器的分压电阻,实现对不同的电压信号进行采集。或调整输入电阻,将电流信号转化为电压信号,进行数据采集。
外部控制部分包括对PWM波的控制与继电器控制。当无人机航电系统下发控制指令时,由FPGA控制IO口生成相应的信号,输出给外部设备。
数据通信部分主要分成与控制模块通信、与外部传感器通信两部分。与航电系统内部通信,采用RS232通信方式,将采集到的数据,按照特定格式发送给控制模块。与外部传感器通信,根据控制模块的指令,接收传感器数据,并发送控制信号。
控制模块是发动机控制系统的核心,主要功能根据信息采集模块发送的数据,对发动机做出合理和控制指令,然后将这些数据按照特定格式发送给航电系统,结构图参见图4,主处理器选用ARM。整个控制模块有两个接口,接口1与信息采集模块连接,用于两个模块之间的通信;接口2与航电系统相连接,用于与航电系统的通信。
软件主要包括:自检测软件、信息管理、控制律软件等,软件流程图参见图3。
控制模块的的自检测软件分为开机自检测及飞行中自检测两个功能。
(1)开机自检测
上电开机后,先检查模块自身各部分功能是否具备,工作是否正常。
(2)飞行中自检测
上电开机后,根据航电系统下发的自检指令,检查电路自身各部分功能是否具备,工作是否正常。
信息管理软件主要是接收信息采集模块发来的数据,以及对数据进行解析。同时根据控制率软件的结果发送给信息采集模块。
控制率软件主要任务是根据发动机及相关传感器的信息,做出合理的控制决策。控制率采用滑模控制与PID控制相结合的控制策略,实现方式如下:
为了改善传统PID系统超调与稳态性能之间存在矛盾的缺点,同时抑制滑模变结构控制器的抖振问题,提出一种滑模控制与PID控制相结合的控制策略。滑模控制器的设计分为两个过程,第一个过程是滑模曲面的设计,也即选择适当的切换函数,使系统到达切换面时能有期望的动态特性;第二个过程是趋近律的设计,使得系统能够在有限时间内到达滑模超平面,沿着滑模曲面最终到达稳定状态。
根据汽油发动机的传递函数模型,可得其状态空间模型的能控标准型为
C=[0 441 -4978]
设y
其中,u为实际控制率,
N=[-CB -CAB]
m
为了保证系统能在曲面s(σ)=0上滑动,需要曲面满足
其中,
进而可以得到
借此可以得到系统在滑膜曲面上的控制率u
选取指数趋近律作为滑膜的趋近律,得到控制率u(t)为:
进而可以得到控制率u(t)为:
将参数值带入上式,可以求得控制率为
X表示状态向量,X=[x
本发明系统控制流程是:
根据倾转旋翼无人机飞行任务剖面,如图6所示,整个任务分成地面点火试车1、悬停爬升2、倾转至固定翼3、加速爬升4、长时间巡航5、减速降高6、倾转至直升机7、降低高度8、降落熄火9。
地面点火试车1阶段:发动机点火,发动机上的发电机开始工作,给无人机蓄电池充电,发动机控制系统开机上电。系统上电后开始自检,自检通过后,开始检测发动机工作状态,并控制发电机持续为电平充电,直至充满。
悬停爬升2阶段:当发动机各项参数正常,蓄电池充满后,发动机控制系统控制发动机油门位置,产生升力,推动无人机垂直爬升。监测发动机输出转速,控制油门位置,使发动机输出转速达到最大。当发动机工作在满功率状态时,控制发电机停止工作,由蓄电池为控制系统、航电设备及舵机提供电力,直至转入倾转状态。
倾转至固定翼3阶段:持续监测发动机状态,控制发动机油门位置在合理位置,发电机停止工作,蓄电池提供无人机所需电力。
加速爬升4阶段:监测发动机状态,控制发动机油门至合理位置,快速爬升至指定位置。同时打开发电机,为蓄电池用充电。
长时间巡航5阶段:降低发动机转速,用发电机与蓄电池同时为无人机用电设备提供持续电力。
减速降高6阶段:调整发电机油门位置,降低无人机速度与高度。
倾转至直升机7阶段:持续监测发动机状态,控制发动机油门位置在合理位置,发电机停止工作,蓄电池提供无人机所需电力。
降低高度8阶段:发动机控制系统控制发动机油门位置,推动无人机垂直下降。监测发动机输出转速,控制油门位置,使发动机输出转速达到最大。由蓄电池为无人机提供电路。
降落熄火9阶段:无人机安全降落后,发动机控制系统缓慢减小发动机油门位置,降低发动机转速,持续监测发动机工作状态。发动机停车后,控制系统依靠蓄电池电量继续工作一段时间,保持对发动机的持续监测。当发动机冷却后,控制系统完成工作,可以切断供电。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
- 一种倾转旋翼无人机发动机控制系统
- 一种倾转旋翼无人机的控制方法及倾转旋翼无人机