一种环形倾转无人机
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及无人机技术领域,具体地,涉及一种环形倾转无人机。
背景技术
无人机普遍采用的是四轴旋翼的设计,采用这种设计的无人机,在向前飞行时是依靠尾部两个旋翼转速的提高增大升力,是将无人机变成头部向下倾、尾部提高的姿态,也就是四个旋翼整体向前倾的姿态,这样就有了一个向后的推力,使无人机能向前运动。但也导致了一个问题,当无人机整体向前倾时,机身受力面积增大,增大了空气阻力从而导致无人机不得不消耗更多的电能来维持前进。本发明对无人机进行改进,使无人机在不改变飞行姿态的前提下,实现长距离高速飞行,且在做出改进后,实现精准控制前行方向、悬停等功能。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种环形倾转无人机,以解决现有的四旋翼无人机无法高速前进飞行的问题。
为了实现上述目的,本发明提供如下技术方案:
一种环形倾转无人机,其特征在于,包括:
机架,设于机架四个角部孔洞处的旋翼,设于机架中心孔洞处的倾转部分;
所述旋翼包括:固定于机架四个角部孔洞处的直流无刷电机,设于直流无刷电机上与之相连接的螺旋桨;
所述倾转部分包括:伺服电机,与伺服电机相连的伺服电机驱动齿轮,与伺服电机驱动齿轮相咬合的倾转轴驱动齿轮,依次穿过隔板及倾转轴驱动齿轮、齿轮壳的倾转轴,位于倾转轴中部的旋翼部分;
所述倾转旋翼部分包括:与倾转轴相连的电机倾转底座,设于电机倾转底座上部并与之相连的电机,设于电机上部并与之相连的螺旋桨;
优选地、电机与电机倾转底座之间用电机固定螺丝相连。
优选地、电机倾转底座与倾转轴间八颗底座固定螺丝相连。
优选地、所述机翼由中心线向边缘两侧延伸方向厚度逐渐减小。
优选地、所述倾转轴驱动齿轮、伺服电机驱动齿轮通过固定螺丝固定在隔板上。
优选地、所述齿轮壳通过固定螺丝固定在机架上。
优选地、所述的伺服电机选用直流无刷伺服电机。
附图说明
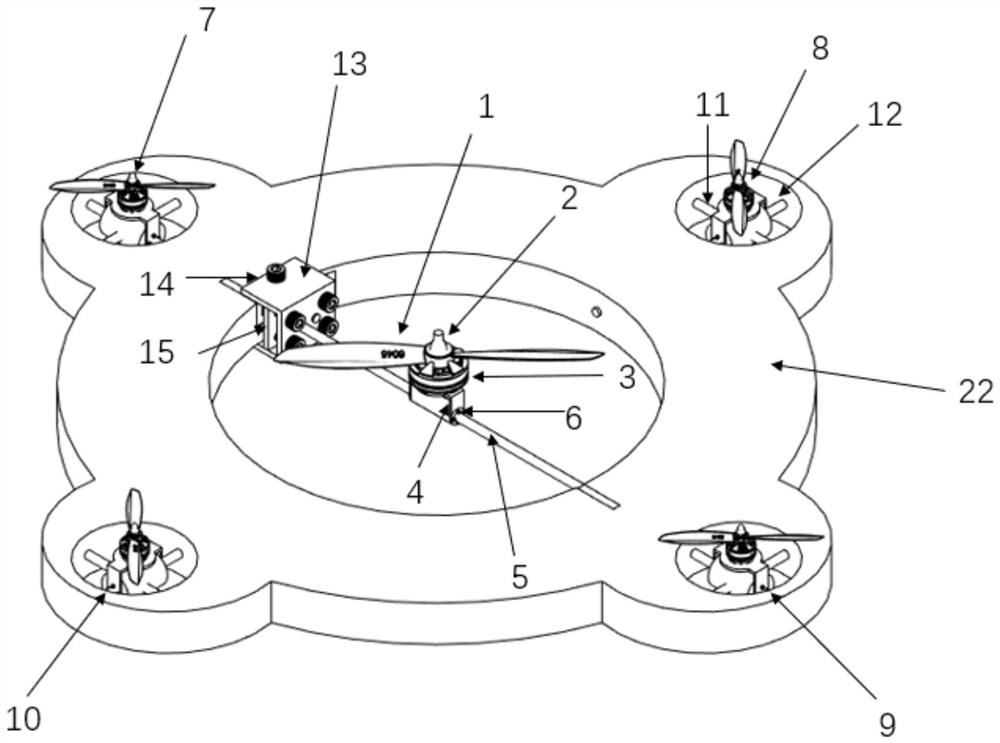
图1为本发明的立体结构示意图;
图2、3为本发明的部分内部结构示意图;
图4为本发明的螺旋桨部分结构示意图
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
一种环形倾转无人机,其特征在于,包括
机架22,设于机架22四个角部孔洞处的旋翼9,设于机架中心孔洞处的倾转部分;
所述旋翼9包括:固定于机架22四个角部孔洞处的直流无刷电机,设于直流无刷电机上与之相连接的螺旋桨;
所述倾转部分包括:伺服电机18,与伺服电机相连的伺服电机驱动齿轮19,与伺服电机驱动齿轮19相咬合的倾转轴驱动齿轮20,依次穿过隔板15及倾转轴驱动齿轮 20、齿轮壳13的倾转轴5,位于倾转轴5中部的旋翼部分;
所述倾转旋翼部分包括:与倾转轴5相连的电机倾转底座4,设于电机倾转底座4上部并与之相连的电机3,设于电机3上部并与之相连的螺旋桨;
优选地、电机3与电机倾转底座4之间用电机固定螺丝21相连。
优选地、电机倾转底座4与倾转轴5之间八颗底座固定螺丝6相连。
优选地、所述机翼1由中心线向边缘两侧延伸方向厚度逐渐减小。
优选地、所述倾转轴驱动齿轮20、伺服电机驱动齿轮19通过固定螺丝14固定在隔板15上。
优选地、所述齿轮壳13通过固定螺丝14固定在机架22上。
优选地、所述的伺服电机18选用直流无刷伺服电机。
相应地,本发明还提出了采用上述的一种环形倾转无人机的使用方法,其包括步骤:
在无人机起飞时,FOC矢量控制器开始驱动伺服电机开始工作,通过齿轮组的传动,使旋转轴旋转,倾转轴驱动齿轮带动的整体与地面成水平状态,这时五个螺旋桨均开始旋转,当达到一定转速时,无人机开始起飞。
当无人机完成垂直起飞后,需要高速前行时,FOC矢量控制器驱动伺服电机控制齿轮组的转动,使得倾转轴驱动齿轮带动的整体旋转一定角度,与地面呈垂直态,无人机获得向前的推力,开始高速前行,这时无人机的升力由分布在四个角落的旋翼旋转提供。
在无人机降落时,FOC矢量控制器开始驱动伺服电机控制齿轮组的转动,使得倾转轴驱动齿轮带动的整体旋转一定角度,与地面成水平状态,这时五个螺旋桨均开始降低转速,无人机开始下降,当无人机完成降落后,螺旋桨停止转动。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明创造,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种环形倾转无人机
- 一种无人机的电机倾转装置及无人机