一种基于力量采集装置的运行趋势判定方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明属于微控制器应用技术领域,尤其涉及一种基于力量采集装置的运行趋势判定方法。
背景技术
腿部训练器是针对田径类运动员腿部力量及速度进行训练的设备。传统的腿部力量训练器不包含电气部分,每次训练数据需要靠人工记录,且每次训练的力量大小未知,两次训练的时间间隔由人工计时,存在一定的误差,同时运动员的所有运动数据都无法自动上传至系统进行存储,这些不便于对运动员的训练情况做详细的分析和制定相应的训练计划。
增加电气设备对运动员训练情况进行统计时,需要判断运动员在训练中的运动趋势,现有技术采用红外设备进行趋势判断,判断结果易受红外光线影响,准确率不高,设备系统结构复杂且对于使用环境光线要求较高,无法满足运动员的训练使用要求。
发明内容
基于背景技术的技术问题,本发明提出了一种基于力量采集装置的运行趋势判定方法。
本发明的技术方案为一种基于力量采集装置的运行趋势判定方法。
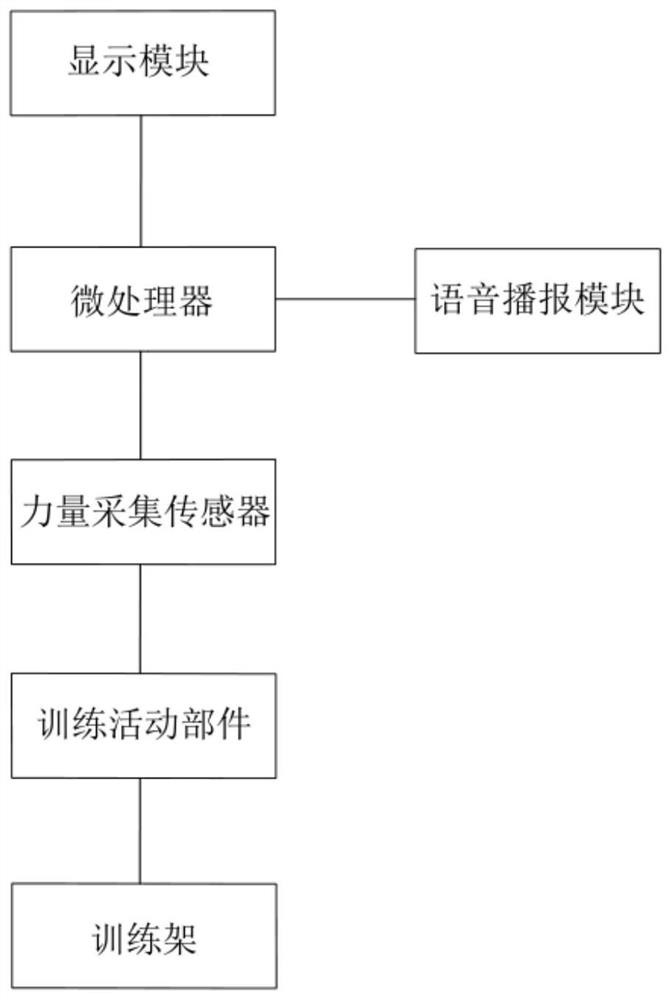
所述力量采集装置包括:训练架、训练活动部件、力量采集传感器、微处理器、显示模块、语音播报模块;
所述的力量采集传感器固定于所述训练架上并通过螺栓与所述训练活动部件连接;所述微处理器分别与所述的力量采集传感器、显示模块、语音播报模块通过有线方式依次连接;
所述力量采集传感器在每个周期内实时采集多个时刻的力量信号,并传输至所述微处理器;
所述微处理器根据每个周期内实时采集多个时刻的力量信号实现所述运行趋势判定方法,并得到力量统计信号;
所述微处理器根据力量统计信号控制所述语音播报模块进行语音播报计数;
所述微处理器将训练的时间、训练次数、训练最大力量值通过所述显示模块进行显示,其中训练时间为第一次有效训练开始到最后一次有效训练结束的间隔时间,次数为训练过程中力量超过力量阈值的总次数,即在每次运行趋势判断为由向前变为先后且最大力量值超过力量阈值时计数一次,单次训练最大值为从运行趋势判断为向前至运行趋势判断为向后过程中保存的最大力量值,训练中最大值为训练过程中每次训练最大力量值中的最大者,多次训练时间及次数为中间暂停训练后重新开始训练,上述数据重新计算后所得;
所述运行趋势判定方法,包括以下步骤:
步骤1:所述力量采集传感器每个周期内实时采集多个时刻的力量信号,并传输至所述微处理器;
步骤1所述每个周期内实时采集多个时刻的力量信号,具体定义为:
data
i∈[1,M],j∈[1,N]
其中,data
步骤2:所述微处理器将每个周期内实时采集的力量信号通过数据预处理,得到每个周期内预处理后的力量信号;
步骤2所述数据预处理为:在data
步骤3:所述微处理器根据每个周期内预处理后的力量信号计算相邻两个周期内加速度,根据相邻两个周期内加速度进一步进行趋势判定,根据趋势判定的结果更新显示模块数据、控制所述语音播报模块进行进行语音播报计数;
步骤3所述计算相邻两个周期内加速度为:
其中,pow
步骤3所述根据相邻两个周期内加速度进一步进行趋势判定为:
若
若
所述微处理器内部定时器记录第一个运动趋势向前的时间为time
若连续四个相邻周期内,第一个相邻周期、第二个相邻周期均为运动趋势向前,第三个相邻周期、第四个相邻周期均为运动趋势向后,则判定为一次往复训练,记为第c次往复训练;
若出现连续两个相邻周期的运动趋势向前,且在一段时间后首次出现连续两个相邻周期的运动趋势向后,则判定为一次往复训练,记为第c次往复训练;
通过所述微处理器内部定时器分别记录第c次往复训练中第一个相邻周期起始时间为time
通过所述微处理器内部定时器分别记录第c+1次往复训练中第一个相邻周期起始时间为time
在time
所述微处理器内部定时器记录最后一次即第count次往复训练中最后一个向后趋势的时间为time
进一步计算训练的时间为:time
训练次数为:count;
每次往复训练中力量信号最大值依次为:maxpower
maxpower
步骤3所述根据趋势判定的结果更新显示模块数据、控制所述语音播报模块进行进行语音播报计数,具体为:
训练次数count、训练最大力量值maxpower
控制所述语音播报模块语音播报训练的时间time
本发明中的有益效果为:
本发明中,采用力量采集装置进行趋势判断,相对于使用红外设备判断趋势的系统,通过减少传感器使用类型及数量优化了系统结构,同时不受光线干扰,提高了趋势判断的准确率。
本发明中,信息采集装置的安装方法较灵活,整个系统除信息采集模块外其他模块可外置或与训练设备设计为一体,既可以在新设计设备中应用,也可以进行旧设备的改装,且应用范围广,除可用于腿部训练设备外,还可以用于手部训练设备等。
附图说明
图1为本发明提出的系统结构图;
图2为本发明提出的方法流程图;
具体实施方法
下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
本发明具体实施方式的技术方案为一种基于力量采集装置的运行趋势判定方法。
所述力量采集装置包括:训练架、训练活动部件、力量采集传感器、微处理器、显示模块、语音播报模块;
所述的力量采集传感器固定于所述训练架上并通过螺栓与所述训练活动部件连接;所述微处理器分别与所述的力量采集传感器、显示模块、语音播报模块通过有线方式依次连接;
所述力量采集传感器在每个周期内实时采集多个时刻的力量信号,并传输至所述微处理器;
所述微处理器根据每个周期内实时采集多个时刻的力量信号实现所述运行趋势判定方法,并得到力量统计信号;
所述微处理器根据力量统计信号控制所述语音播报模块进行语音播报计数;
所述微处理器将训练的时间、训练次数、训练最大力量值通过所述显示模块进行显示,其中训练时间为第一次有效训练开始到最后一次有效训练结束的间隔时间,次数为训练过程中力量超过力量阈值的总次数,即在每次运行趋势判断为由向前变为先后且最大力量值超过力量阈值时计数一次,单次训练最大值为从运行趋势判断为向前至运行趋势判断为向后过程中保存的最大力量值,训练中最大值为训练过程中每次训练最大力量值中的最大者,多次训练时间及次数为中间暂停训练后重新开始训练,上述数据重新计算后所得。
所述力量采集传感器选型为DYLF-102轮辐式称重传感器;
所述显示模块选型为DMT10768T080迪文智能屏;
所述语音播报模块选型为MY1680语音模块;
所述微处理器选型为STC15W微控制器;
所述运行趋势判定方法,包括以下步骤:
步骤1:所述力量采集传感器每个周期内实时采集多个时刻的力量信号,并传输至所述微处理器;
步骤1所述每个周期内实时采集多个时刻的力量信号,具体定义为:
data
i∈[1,M],j∈[1,N]
其中,data
步骤2:所述微处理器将每个周期内实时采集的力量信号通过数据预处理,得到每个周期内预处理后的力量信号;
步骤2所述数据预处理为:在data
步骤3:所述微处理器根据每个周期内预处理后的力量信号计算相邻两个周期内加速度,根据相邻两个周期内加速度进一步进行趋势判定,根据趋势判定的结果更新显示模块数据、控制所述语音播报模块进行进行语音播报计数;
步骤3所述计算相邻两个周期内加速度为:
其中,pow
步骤3所述根据相邻两个周期内加速度进一步进行趋势判定为:
若
若
所述微处理器内部定时器记录第一个运动趋势向前的时间为time
若连续四个相邻周期内,第一个相邻周期、第二个相邻周期均为运动趋势向前,第三个相邻周期、第四个相邻周期均为运动趋势向后,则判定为一次往复训练,记为第c次往复训练;
若出现连续两个相邻周期的运动趋势向前,且在一段时间后首次出现连续两个相邻周期的运动趋势向后,则判定为一次往复训练,记为第c次往复训练;
通过所述微处理器内部定时器分别记录第c次往复训练中第一个相邻周期起始时间为time
通过所述微处理器内部定时器分别记录第c+1次往复训练中第一个相邻周期起始时间为time
在time
所述微处理器内部定时器记录最后一次即第count次往复训练中最后一个向后趋势的时间为time
进一步计算训练的时间为:time
训练次数为:count;
每次往复训练中力量信号最大值依次为:maxpower
maxpower
步骤3所述根据趋势判定的结果更新显示模块数据、控制所述语音播报模块进行进行语音播报计数,具体为:
训练次数count、训练最大力量值maxpower
控制所述语音播报模块语音播报训练的时间time
以上所述,仅为本发明具体实施方式之一,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围。
- 一种基于力量采集装置的运行趋势判定方法
- 一种基于力量采集装置的运行趋势判定方法