一种自动识别电缆线路路径的方法
文献发布时间:2023-06-19 11:45:49
技术领域
本申请涉及电缆检测的领域,尤其是涉及一种自动识别电缆线路路径的方法。
背景技术
近年来,随着城市建设的快速发展,电力电缆已经广泛得到应用,电缆维护的工作量也在增加。由于电缆埋设于地下,在电力传输过程中,往往会由于电缆本身的温度或者埋设环境因素而导致电缆发生破损,影响电缆正常的电力传输。而电缆原始的路径资料由于城市建设日新月异,电力电缆维护人员岗位调整等客观原因,无法精准的获取。因此电缆路径的探测与识别成为电缆维护工作中极其重要的一环。如果无法明确电缆的路径,将增加工程施工时损伤电缆的事故率;不知道电缆的具体走向,就无法对电缆的故障点进行查找,从而会影响到抢修的速度和恢复供电的时间。因此,如何有效的识别出电缆线路的实际路径是目前待解决的问题。
发明内容
为了能够有效的识别出电缆线路的实际路径,本申请提供一种自动识别电缆线路路径的方法。
本申请提供的一种自动识别电缆线路路径的方法采用如下的技术方案:
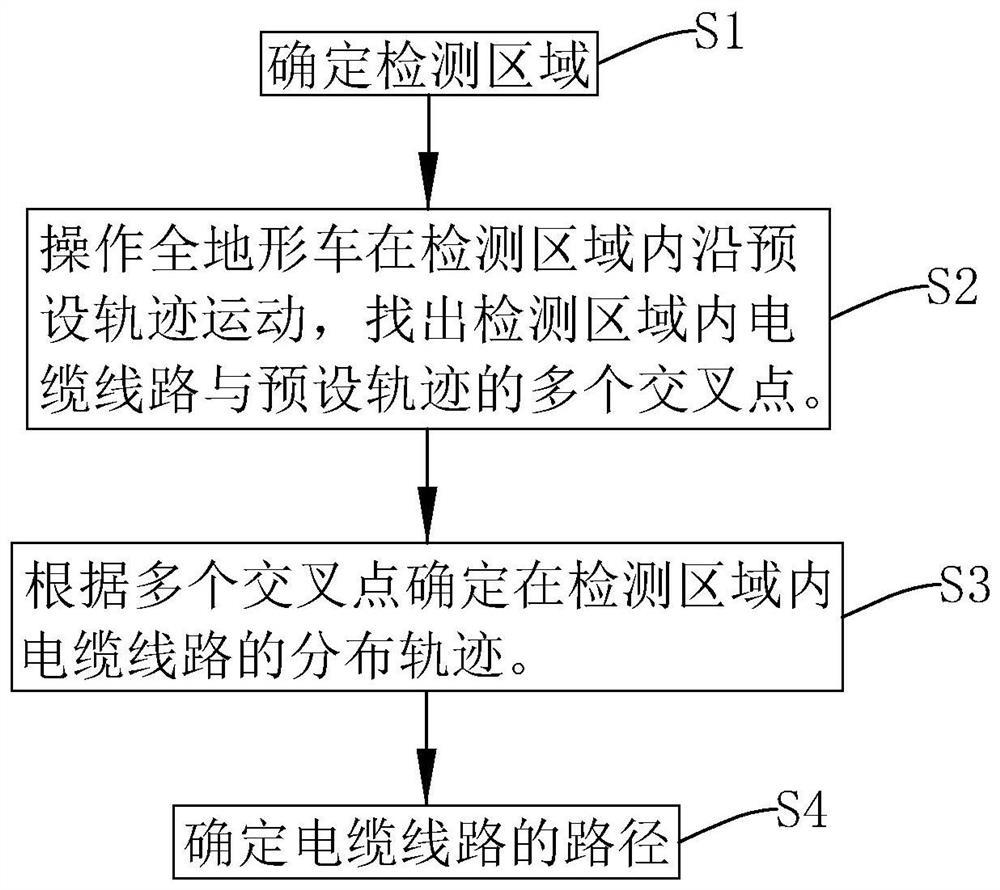
一种自动识别电缆线路路径的方法,包括以下步骤,
S1:确定检测区域;
S2:操作载具在检测区域内沿预设轨迹运动,找出检测区域内电缆线路与预设轨迹的多个交叉点;
S3:根据多个交叉点确定在检测区域内电缆线路的分布轨迹;
S4:确定电缆线路的路径;操作载具沿分布轨迹行驶,通过安装在载具上的巡线器检测出的电缆与震荡发声器连接后电缆四周产生的声音信号场的分贝值变化趋势调整载具的行进方向,得到载具的行驶轨迹,拟合载具的行驶轨迹生成电缆线路的路径。
通过采用上述技术方案,在进行电缆线路的路径识别时,先确定需要检测的区域,然后找出检测区域内电缆线路与预设轨迹的交叉点,从而得出电缆线路的大致路线即电缆的分布轨迹,最后通过安装在载具上的巡线器检测到的声音信号场的分贝值变化趋势,可以判断出载具是朝靠近电缆线路的方向行驶还是朝远离电缆线路的方向行驶,并调整载具的行驶轨迹,通过将行驶轨迹光滑拟合即可得到电缆线路的路径。实现了对电缆线路的实际路径进行精准的识别,降低了施工时损伤电缆的概率,同时也便于工作人员后续在电缆线路上对电缆故障点进行查找,提高抢修速度。
可选的,所述步骤S4中调整载具的行进方向时,通过与巡线器连接的PLC处理器实时的统计巡线器检测的声音信号场的分贝值,通过统计的声音信号场分贝值的变化趋势调整载具的行进方向。
通过采用上述技术方案,当巡线器检测到的声音信号场的分贝值逐渐增大时,说明载具距离电缆线路的距离逐渐减小,当巡线器检测到的声音信号场的分贝值逐渐减小时,说明载具距离电缆线路的距离逐渐变远,根据巡线器检测到的声音信号场的分贝值变化趋势就可以判断出载具与电缆线路的相对位置,从而对载具的行驶方向进行调整。
可选的,当PLC处理器统计的巡线器检测的声音信号场的分贝值逐渐变小时,调整载具的行进方向。
通过采用上述技术方案,当巡线器检测到的声音信号场的分贝值逐渐变小时,说明载具朝远离电缆线路的方向行驶,需要向电缆线路所在方向调整载具的行驶方便。
可选的,所述载具被配置为安装在载具上的巡线器检测出的电缆与震荡发声器连接后电缆四周产生的声音信号场的分贝值变化趋势发生转变时,能够自动调节其前进方向,以使载具朝电缆线路所在方向行驶。
通过采用上述技术方案,使得载具可以自动的调整其前进方向,始终朝电缆线路所在方向靠近。
可选的,所述载具包括行走组件,所述行走组件与PLC处理器连接,用于根据电缆线路与分布轨迹的相对位置调整载具的行进方向。
通过采用上述技术方案,当PLC处理器统计到的巡线器检测到的分贝值变化需要调整载具的行进方向时,PLC处理器将自动控制行走组件的行进方向,实现自动化的控制。
可选的,载具从位于端部的一个交叉点行驶至位于另一端的交叉点处后,记录载具的行驶轨迹。
通过采用上述技术方案,记录载具的行驶轨迹,即得到电缆线路的埋设路径。
可选的,所述预设轨迹为载具从检测区域一端沿S形曲线运动至检测区域另一端所行走的路线。
通过采用上述技术方案,通过操作载具沿预设轨迹行驶,可以使得载具多次从电缆线路上经过,从而得出预设轨迹与电缆线路的交叉点,即找出电缆线路上的多个点。
可选的,所述载具沿所述预设轨迹行驶时,安装在载具上的巡线器检测出电缆与震荡发声器连接后电缆四周产生的声音信号场的分贝值,通过巡线器检测到的声音信号场的分贝值与声音信号场的预设值比较即可得出所述交叉点的位置。
通过采用上述技术方案,当巡线器检测到的声音信号场的分贝值大于预设值时,说明此时巡线器位于电缆线路的正上方,即可得出交叉点的位置。
可选的,所述步骤S2中,当载具行驶至电缆线路与预设轨迹的交叉点时,记录载具在该处的位置。
通过采用上述技术方案,将交叉点的位置记录下来,便于后续对电缆线路的识别工作。
可选的,所述载具上安装有GPS定位器。
通过采用上述技术方案,通过GPS定位器可以实现对载具位置的获取,便于记录载具的行驶轨迹或载具的位置信息。
综上所述,本申请包括以下至少一种有益技术效果:
1.通过先确定检测区域,再找到电缆线路和预设轨迹的交叉点,随后确定分布轨迹,并通过安装在载具上的巡线器检测到的声音信号场的分贝值变化趋势,调整载具的行驶轨迹,最后通过将行驶轨迹光滑拟合即可得到电缆线路的路径,实现对电缆线路的实际路径进行精准的识别;
2.通过实时的统计巡线器检测的声音信号场分贝值的变化趋势,即可判断载具是朝靠近电缆线路的方向行驶还是朝远离电缆线路的方向行驶,便于对载具的行驶方向进行调整,使得载具可以朝电缆线路所在方向前进;
3.行走组件与PLC处理器的连接,可以通过PLC处理器控制载具的行进方向,实现对载具前进方向的自动控制。
附图说明
图1是本申请中为了体现载具结构所做的示意图。
图2是本申请整体的流程示意图。
图3是为了体现检测区域内分布方式所做的示意图。
图4是为了体现控制单元所做的示意图。
附图标记说明:1、载具本体;11、行走组件;2、控制单元;21、检测模块;211、巡线仪;2111、巡线器;212、GPS定位器;22、用户终端;23、PLC处理器;3、检测区域;31、预设轨迹;32、电缆线路;33、交叉点;34、分布轨迹。
具体实施方式
以下结合附图1-4对本申请作进一步详细说明。
本申请实施例公开一种自动识别电缆线路路径的方法。该识别电缆线路路径的方法借助于载具实现,参照图1,载具包括载具本体1以及用于实现载具本体1自动识别电缆路径的控制单元2。
参照图2和图3,自动识别电缆线路路径的方法包括以下步骤:
S1:确定检测区域3。
S2:操作载具本体1在检测区域3内以预设轨迹31运动,找出检测区域3内电缆线路32与预设轨迹31的多个交叉点33;
参照图4,具体的,控制单元2包括检测模块21、用户终端22和连接在检测模块21和用户终端22之间的PLC处理器23,其中,检测模块21安装在载具本体1上,用于在载具本体1行进时自动找寻埋设在地下的电缆的位置。检测模块21与PLC处理器23之间可以通过有线连接,也可以通过无线连接;用户终端22与PLC处理器23之间通过无线连接,具体的,可采用4G、蓝牙等方式连接。
检测模块21包括巡线仪211,巡线仪211包括震荡发声器(图中未示出)和巡线器2111,巡线仪211为现有产品,在此不做详细的赘述,其中,震荡发声器与电缆端口连接,巡线器2111安装在载具本体1上且与PLC处理器23连接。使用时,将巡线仪211的震荡发声器发出的声音连接至电缆的端口后,电缆线路32周围将产生一环绕的声音信号场。当载具本体1沿预设轨迹31运动时,巡线器2111可以识别出声音信号场的强弱。当巡线器2111检测到的声音信号场的强度大于声音信号场的预设值时,则判断该位置即为电缆线路32与预设轨迹31的交叉点33。其中,声音信号场的预设值为已知的,当巡线器2111位于电缆线路32正上方时能够检测到的声音信号场的分贝值。
可以理解的是,也可以采用超声波原理的巡线仪211,操作巡线仪211向地面发射超声波信号,通过反射回的信号即可判断该位置是否埋设有电缆,得出电缆线路32与预设轨迹31的交叉点33。当然,也可以采用其他结构形式的巡线仪211,只要能够实现对电缆位置的精准定位即可。
参照图3和图4,检测模块21还包括设置在载具本体1上的GPS定位器212,GPS定位器212通过PLC处理器23连接至用户终端22,GPS定位器212能够精确定位出载具本体1的经纬度坐标,在巡线器2111确定载具本体1所处的位置为电缆线路32和预设轨迹31的交叉点33时,PLC处理器23将获取GPS定位器212所测得的载具本体1的经纬度坐标,并将该经纬坐标值传输至用户终端22,通过用户终端22显示出各个交叉点33的位置信息。
其中,用户终端22可以为手机,也可以为手持遥控器等。
参照图3,预设轨迹31可以为载具从检测区域3的一端沿S形曲线运动至检测区域3的另一端,或载具从检测区域3的一端沿折线状运动至检测区域3的另一端的路线图,本申请以预设轨迹31为S形为例进行说明。
S3:参照图2和图3,根据多个交叉点33确定在检测区域3内电缆线路32的分布轨迹34;通过将多个交叉点33进行连线,即可得到在检测区域3内电缆线路32的分布轨迹34。
S4:确定电缆线路32的路径图;
具体的,操作载具本体1从位于端部的一个交叉点33处沿分布轨迹34行驶,位于载具本体1上的巡线器2111可以实时的对声音信号场的强度进行检测,当分布轨迹34和电缆线路32出现偏差时,巡线器2111检测到的声音信号场的分贝值也将发生变化,通过巡线器2111检测的分贝值的变化趋势调整载具本体1的前进方向,以使载具本体1始终在电缆线路32附近行驶。
其中,为了实现对载具本体1前进方向的自动控制,载具本体1包括行走组件11,PLC处理器23与行走组件11连接,当PLC处理器23获取到巡线器2111分贝值的变化趋势需要调整载具本体1的前进方向时,PLC控制器23将控制行走组件11调整其前进方向,以实现对载具本体1前进方向的自动控制。
具体的,参照图3,使用时,先将载具本体1放置在预设轨迹31和电缆线路32的交叉点33上,并操作载具本体1向电缆线路32的一端行驶,当载具本体的行驶路径和电缆线路32出现偏差时,载具本体1距离电缆线路32的距离也将增大,安装在载具本体1上的巡线器2111检测到的声音信号场的分贝值逐渐减少,PLC处理器将实时的对巡线器2111检测到的分贝值进行统计,当统计到巡线器2111检测的分贝值逐渐减少时,说明载具本体1向远离电缆线路32的方向行驶,此时需要调整载具本体1的前进方向。可以调整载具本体1向设定方向偏转设定角度,继续操作载具本体1行驶,若巡线器2111检测到的分贝值持续增大,说明方向调整错误,需要反向调整载具本体1的前进方向;若巡线器2111检测到的分贝值降低,说明方向调整正确,操作载具本体1继续前进。此时载具本体1将带动巡线器2111将向电缆线路32所在方向前进,直至到达电缆线路32的正上方,巡线器2111检测到的分贝值也到达最大值。载具本体1继续前进,此时,载具本体1将越过电缆线路32向远离电缆线路32的方向前进,巡线器2111检测到的分贝值也将逐渐减小,此时需要重新调整载具本体1的前进方向,调整载具本体1向电缆线路32所在方向前进,此时载具本体1也将再次到达电缆线路32的最上方,巡线器2111检测到的分贝值也到达最大值。依次循环,直至载具本体1到达位于另一端的交叉点33处,而载具本体1所走的路径也为多次和电缆线路32交叉的折线形。
其中,设定方向可以为载具本体1向其前进方向的左侧偏转也可以向其前进方向的右侧偏转;设定角度可以为0-90度之间的任意角度,优选设定角度为10-45度。
在载具本体1行驶的过程中,PLC处理器23也通过GPS定位器212获取载具本体1的行驶路径的位置信息,并将载具本体1行驶路径的位置信息传输至用户终端22,通过用户终端22显示出来。最后对载具本体1的行驶路径进行平滑拟合,具体的,找到该行驶路径上分贝值达到声音信号场预设值的多个点,通过平滑的曲线将多个点连接,即可得出电缆线路32的路径图。
本申请实施例一种自动识别电缆线路路径的方法的实施原理为:先通过确定大致的检测区域3,然后再根据检测区域3找出预设轨迹31与电缆线路32的多个交叉点33,并对多个交叉点33连线得出电缆线路32的大致分布轨迹34,最后通过巡线器2111检测到的载具本体1相对于电缆线路32的位置调整载具本体1的行进方向,得出多次与电缆线路32交叉的载具本体1的行驶路径图,最后通过平滑拟合载具本体1的行驶路径即可得出电缆线路32准确的埋设路径。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种自动识别电缆线路路径的方法
- 一种识别电缆线路路径的方法