一种风洞侧壁支撑运动机构的自动校零机构和校零方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及风洞试验领域,具体涉及到一种风洞侧壁支撑运动机构的自动校零机构和校零方法。
背景技术
风洞侧壁支撑运动机构采用直线传动实现角度运动,其侧滑(β)机构动作原理如图1所示。通过电动推杆的直线伸缩运动,带动旋转臂绕旋转轴进行角度运动,从而带动旋转机架和试验模型一起绕旋转轴实现β角度运动。各个β角度点与推杆直线位移相对应,推杆直线位移通过电机缸的电机编码器间接求取。类似机构每运行一段时间后,为保证定位准确性,可通过重新确认角度机构零位与电机编码器的值之间的对应关系,从而保证其他定位点角位移的准确性。
在目前已经公开的技术文献中,并没有专门针对该问题进行有效的解决办法。一般情况下,都是通过试验人员手动对其支撑机构进行零位调整。因为本试验的试验环境是在风洞内的高空,手动校零时需要在高空作业,存在检测时间长,检测难度大,不便于进行频繁检测等问题。
在控制领域已公开的技术文献中,有很多方案能实现对机械结构的精准控制,从而实现对零位的校准。但是,因为本领域是风洞试验领域,针对的试验对象和试验环境是需要精准的模拟试验对象在流场中的各个状态并进行测量。而在已有的支撑设备上增加更多的控制设备必然造成对风洞内流场的破坏,因此需要设计一种新的方案,能够解决对风洞流场中的支撑机构的自动校零。
发明内容
本发明的目的设计一种风洞侧壁支撑运动机构的自动校零机构和校零方法,在不干涉支撑机构运动的前提下,通过非接触式的控制方式,实现自动校零的控制。
为实现上述目的,本发明采用如下技术方案:
一种风洞侧壁支撑运动机构的自动校零机构,包括连接在风洞侧壁上的旋转机架,所述旋转机架一端连接试验模型,旋转机架另一端固定连接到旋转轴,所述旋转轴与旋转臂的一端固定连接;电动缸,所述电动缸包括缸筒和设置在缸筒内的推杆,所述推杆端部与旋转臂的另一端活动连接,所述推杆上的一段表面设置有反射层,所述缸筒的内壁面上沿着轴向设置有两个独立的光电开关,光电开关的信号发射接收表面与推杆的运动方向平行,所述推杆的反射层与光电开关的信号发射接收表面相互不接触。
在上述技术方案中,所述缸筒的侧壁沿着轴向设置有一个贯穿缸筒侧壁的滑槽,所述两个光电开关设置在滑槽内。
在上述技术方案中,两个光电开关的信号发射接收表面齐平,且光电开关的信号发射接收表面到缸筒轴线的间距大于推杆的半径。
在上述技术方案中,包括设置在电动缸外的位置调整装置,所述位置调整装置包括第一连接臂和第二连接臂,所述第一连接臂和第二连接臂各自通过连杆与连接块连接,所述连接块与伸缩机构连接,所述第一连接臂和第二连接臂各自连接一个光电开关。
在上述技术方案中,第一连接臂和第二连接臂各自嵌入在缸筒侧壁的滑槽内,第一连接臂和第二连接臂沿着滑槽的方向相互滑动。
在上述技术方案中,连杆的一端通过铰链的形式与第一连接臂和第二连接臂连接,连杆的另一端通过铰链的形式与连接块连接。
一种风洞侧壁支撑运动自动校零方法,包括以下步骤:
步骤一:将两个光电开关以滑槽中心为对称点固定在第一连接臂和第二连接臂上,形成一个整体;
步骤二:通过手动测量的方式找到试验需要的机构零点位置;
步骤三:整体移动光电开关与反射带的相对距离,整体移动位置调整装置至滑槽中心正对反射带中心的位置,并将位置调整装置固定于电动缸壁面上;
步骤四:根据确定好的光电开关与反射带的相对距离,参照开关作用范围与开关光面和反射带之间正对距离的关系,通过位置调整装置沿滑槽调整两个开关之间的距离至合适的值;
步骤五:对光电开关供电,运动机构,当反射带运动至两个光电开关同时产生感应信号的位置时,两个开关皆输出信号至控制系统,控制系统自动以该位置作为机构零位,用于后续的运动控制。
在上述技术方案中,在进行零点位置确定时,包括以下过程:
定义反射带的宽度为
当
当
在上述技术方案中,两个光电开关同时检测需满足:
当
在上述技术方案中,两个光电开关同时检测时,零位检测误差小于单开关时零位检测误差,双向运动之间零位检测误差小于单开关双向运动之间零位检测误差。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
本发明中,反射带粘贴于推杆表面,光电开关与推杆相距一段距离,不干涉机构运动;
本发明中,将光电开关安装于安装座上,安装座的位置可根据检测需要沿运动方向进行调节,发光器光轴与反射带正对并与运动轴线呈90°夹角,满足对光信号的可靠检测;
本发明中,因采用反射式光电开关,整个检测过程无开关接触和磨损,能保证长时间多次检测的精度要求;
本发明中,采用双开关两点检测的方式,通过调整开关之间的距离至合适的值,减小双向运动之间零位检测的差异,满足零位准确检测的要求。
附图说明
本发明将通过例子并参照附图的方式说明,其中:
图1是侧壁支撑机构动作原理示意图;
图2是光电开关动作范围与开关和反射带之间正对距离对应关系变化示意图;
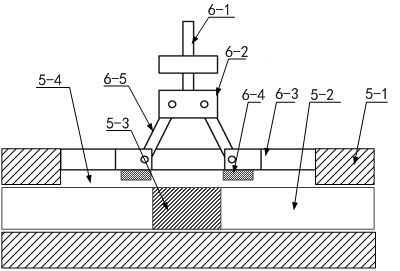
图3是反射式两点检测方法安装作用示意图;
图4为光电开关之间距离a<2Y+d时双向运动开关作用位置示意图;
图5为光电开关之间距离a=2Y+d时双向运动开关作用位置示意图。
具体实施方式
本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
本说明书(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
如图1 所示,整个试验机构包括被测试验模型1、旋转支架2、旋转轴3、旋转臂4和电动缸5,所示旋转支架2与旋转轴3固定连接,旋转臂4的一端与旋转轴3固定连接,通过转动旋转臂4带动旋转轴3带动旋转支架2使得试验模型1进行侧滑角β的调整。
本实施例中,采用在电动缸5上做出改进,电动缸5包括缸筒5-1和设置在缸筒5-1内的推杆5-2,所述推杆5-2的一端与旋转臂4的一端通过铰链活动连接,通过改变推杆5-2的直线行程B,实现对于侧滑角β内对试验模型进行调整。
在本实施例中,采用非接触式的光电感应方式实现对于整个机构校零。如图3所示,在缸筒5-1上,平行于轴线,在缸筒5-1的侧壁上设置一个贯通侧壁的滑槽5-4,所述滑槽5-4用于固定安装位置调整装置,位置调整装置包括伸缩机构6-1、连接块6-2、连杆6-5和连接臂6-3。其中连接臂6-3具有结构一致的第一连接臂和第二连接臂,第一连接臂和第二连接臂各自通过一根连杆6-5连接到连接块6-2上,其中连杆6-5两端分别采用铰链的方式各自与第一连接臂和第二连接臂和连接块6-2连接。第一连接臂和第二连接臂各自连接有一个光电开关6-4。
在本实施例中,第一连接臂和第二连接臂是通过连接件嵌入在滑槽5-4内的,第一连接臂和第二连接臂可以沿着缸筒5-1的轴线方向进行移动,而实现移动的功能是通过伸缩机构6-1上下伸缩带动连杆6-5使得第一连接臂和第二连接臂在滑槽内平行滑动。
光电开关设置在第一连接臂和第二连接臂的表面,光电开关的发光器光轴与反射带5-3正对并与推杆5-2轴线呈90°夹角。将整体的位置调整装置确定好位置后固定在缸筒5-1外部。
在本实施例中,光电开关信号输出类型和接口应与控制系统信号输入端统一,反射带通过粘贴方式固定于运动轴外表面,反射带宽度
将两个光电开关以位置调整装置的滑槽中心为对称点固定于调整装置安装座上,形成一个整体,并确保开关发射面与滑槽方向平行。机构首次运动时,通过手动测量的方式找到试验需要的机构零点位置。将滑槽平行于推杆运动方向放置,根据现场情况整体移动开关至与反射带合适的距离,移动位置调整装置至滑槽中心正对反射带中心的位置,并将位置调整装置固定于电动缸壁面上。根据确定好的实际距离,参照图2中开关作用范围
根据图4可推得,当
当采用单开关时,双向运动之间检测差量为
因此,当采用双开关时为保证双开关时可同时检测的同时,零位检测误差小于单开关时零位检测误差,双向运动之间零位检测误差小于单开关双向运动之间零位检测误差,应将开关之间最小距离
按照上式,当
实际调整时
调整好各设备位置后,需要进行零位检测时,对光电开关供电,运动机构,当反射带运动至两个光电开关同时产生感应信号的位置时,两个开关皆输出信号至控制系统,控制系统自动以该位置作为机构零位,用于后续的运动控制。
本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。
- 一种风洞侧壁支撑运动机构的自动校零机构和校零方法
- 一种风洞侧壁支撑运动机构的自动校零机构和校零方法