一种具有多驱动系统的无人机
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及一种无人机技术领域,具体是一种具有多驱动系统的无人机。
背景技术
无人机可以充分利用飞行器速度快、探测覆盖面广、时效性强、反应迅速的优势,对近海规定范围内实施海洋环境监测,提高海洋监测效率,有效建立陆海空立体监测系统,满足事故海域图像实时快速获取的需求,可以用于溢油监测、夜间巡航、航道安全巡查、人员搜救及执法取证等;
相应的飞行器应具有机动性强、操作简单、灵活安全、超低空飞行、实时观测等功能,并能够适应水面方式起降并具有在一定近海复杂气象条件下的飞行能力,能实现自主飞行、应急返航和定点盘旋等功能。
但是,由于无人机能携带的能源有限,而其在空中飞行时能耗大,需要在规定的时间内返航补给能源,难以实现在广阔的水面中长时地执行任务和待命,对其任务能力产生了较大的局限性;
现有技术中,有通过在无人机底部设置气囊使其能够漂浮在水面中,从而能够在水面中起降,能够根据需求在水面中待命和回收,但其只能起飞后才能移动,仍然无法进行长距离的任务,能源较少时只能在原地等待回收,增加了使用成本。
因此,有必要提供一种具有多驱动系统的无人机,以解决上述背景技术中提出的问题。
发明内容
为实现上述目的,本发明提供如下技术方案:一种具有多驱动系统的无人机,包括构架,其中,所述构架的前部两侧对称地设有两根前臂,所述构架的后部两侧前后对称的设有两根后臂,且所述前臂与后臂末端各设有螺旋桨,每个所述螺旋桨由独立的伺服电机驱动;
所述构架与前臂通过前臂转轮连接,所述前臂转轮使得前臂能够沿与构架侧面垂直的转轴转动;
所述构架与后臂通过后臂铰链连接,所述后臂铰链使得后臂能够沿与构架侧面平行的转轴转动;
所述构架底部的两侧对称地固定有两个气囊壳体,所述气囊壳体为与构架侧面平行的半圆柱型罩体,其内设有气囊,所述气囊设有电磁排气阀;
所述构架中还设有微型气泵,所述微型气泵的输出口与气囊联通;
所述构架内还设有能源装置和微机电控装置。
进一步的,作为优选,每个所述前臂中的前臂转轮为有凸起形状的凸轮,其远离转轴的一端铰接有转轮连杆,两侧的转轮连杆通过与其可转动地连接的连接轴共同连接到滑块组件中,所述滑块组件与构架可沿其长度方向滑动地连接;
且,所述前臂旋转到水平时,所述前臂转轮的凸起形状位于靠近后臂方向且稍向下倾斜,所述滑块组件滑动到最靠近后臂一端;
所述前臂旋转到垂直时,所述前臂转轮的凸起形状位于下方,所述滑块组件滑动到最靠近前臂一端。
进一步的,作为优选,每个所述后臂个通过一根万向连杆与滑块组件连接,所述万向连杆连接在后臂中后臂铰链与螺旋桨叶片末梢间的位置;
且,所述后臂旋转到水平时,所述滑块组件滑动到最靠近后臂一端,所述前臂旋转到垂直时,所述滑块组件滑动到最靠近前臂一端;
且,所述后臂中连接的螺旋桨的高度小于两个后臂铰链间距的1/2。
进一步的,作为优选,所述构架中心沿长度方向开设有导轨,所述导轨中与其滑动配合地连接有滑块组件,所述导轨内的一侧开设有齿条;
所述滑块组件还通过伺服伸缩杆与构架连接,所述伺服伸缩杆的缸体与构架固定连接,其的活塞杆与滑块组件固定链接。
进一步的,作为优选,所述滑块组件中设有能够通过旋转将其锁止在导轨中或解锁的解锁转块,所述解锁转块固定连接在其一侧的连接轴中,所述解锁转块远离连接轴的一端铰接有解锁连杆;
气囊壳体靠近滑块组件一端的端面中可上下转动地铰接有端盖,且其铰链处设有扭力弹簧,使得所述端盖在气囊未充气时垂直,在其充气后能够被顶开而向趋于水平的方向转动,所述端盖远离气囊的一面与解锁连杆铰接;
当端盖垂直,且滑块组件位于最靠近后臂一端时,解锁连杆拉动解锁转块旋转到使滑块组件锁止在导轨中,而随着端盖向趋于水平的方向转动,滑块组件解锁;
且,当滑块组件向前臂方向移动时,端盖能够被解锁连杆拉动继续向上方旋转而滑块组件保持解锁状态。
进一步的,作为优选,所述滑块组件包括滑块外壳、齿轮,所述滑块外壳与导轨可滑动地连接,所述滑块外壳两侧与连接轴可转动地连接,所述滑块外壳底部可转动地连接有齿轮,所述齿轮与导轨一侧的齿条啮合。
进一步的,作为优选,所述齿轮靠近滑块外壳的一面中开设有棘轮凹槽,所述棘轮凹槽内对应的滑块外壳底部设有锁止组件,所述锁止组件能够通过对棘轮凹槽进行锁止或解锁;
且,所述棘轮凹槽的齿向使得锁止组件能够锁止滑块外壳向靠近前臂方向的移动。
进一步的,作为优选,所述锁止组件包括底盘、棘齿,所述底盘固定连接在滑块外壳底部,所述底盘边缘圆周可旋转地与多个棘齿的中间连接;
所述棘齿旋转到与底盘半径重合使能够抵靠在棘轮凹槽中,而向与底盘半径相切的方向旋转使能够离开棘轮凹槽的位置;
所述底盘中间可转动地设有转盘,所述转盘边缘通过多根棘齿连杆与每个棘齿靠近圆心一端铰接。
进一步的,作为优选,所述滑块外壳内设有直角布置的伞齿轮组,所述伞齿轮组的水平伞齿轮与连接轴固定连接,其的垂直伞齿轮与滑块外壳底部可转动地连接并与转盘固定连接。
进一步的,作为优选,所述齿轮的齿与棘轮凹槽间开设有一圈连接滑槽,所述滑块外壳通过底部的凸起与齿轮的连接滑槽可转动地连接。
与现有技术相比,本发明的有益效果是:
本发明中,能够通过旋转前臂和后臂使前臂中的螺旋桨提供向前的推力而使后臂的螺旋桨提供向两侧的推力,同时配合气囊充气使本发明无人机能够在漂浮在水面上行驶和旋转,使其能够执行水面和空中的任务,并且能够通过在水面中行驶而大大减少能耗,以适应较长距离的水上任务。
本发明中,当气囊未充气时,滑块组件向前臂方向的移动被锁止,需要气囊充气后,滑块组件方能向前臂方向移动,从而确保本发明无人机降落到水面或地面后才能使前臂和后臂向垂直方向旋转,避免由于误操作或系统错误使无人机在空中时前臂和后臂向垂直方向旋转而失去上升力,从而引发安全事故。
附图说明
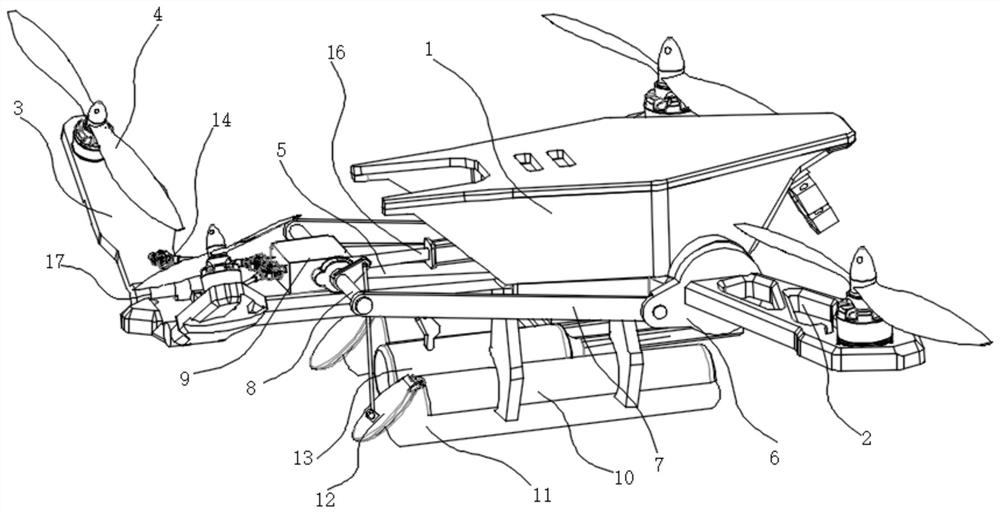
图1为一种具有多驱动系统的无人机的结构示意图;
图2为一种具有多驱动系统的无人机的导轨结构示意图;
图3为一种具有多驱动系统的无人机的端盖和解锁连杆结构示意图;
图4为一种具有多驱动系统的无人机的滑块组件结构示意图;
图5为一种具有多驱动系统的无人机的伞齿轮组结构示意图;
图中:1、构架;2、前臂;3、后臂;4、螺旋桨;5、导轨;51、齿条;6、前臂转轮;7、转轮连杆;8、连接轴;81、解锁转块;82、解锁连杆;9、滑块组件;10、气囊壳体;11、气囊;12、端盖;13、微型气泵;14、万向连杆;16、伺服伸缩杆;17、后臂铰链;91、滑块外壳;92、齿轮;93、连接滑槽;94、棘轮凹槽;95、锁止组件;96、伞齿轮组;951、底盘;952、棘齿;953、转盘;954、棘齿连杆。
具体实施方式
请参阅图1,本发明实施例中,一种具有多驱动系统的无人机,包括构架1,所述构架1的前部两侧对称地设有两根前臂2,所述构架1的后部两侧前后对称的设有两根后臂3,且所述前臂2与后臂3末端各设有螺旋桨4,每个所述螺旋桨4由独立的伺服电机驱动;
所述构架1与前臂2通过前臂转轮6连接,所述前臂转轮6使得前臂2能够沿与构架1侧面垂直的转轴转动;
所述构架1与后臂3通过后臂铰链17连接,所述后臂铰链17使得后臂3能够沿与构架1侧面平行的转轴转动;
所述构架1底部的两侧对称地固定有两个气囊壳体10,所述气囊壳体10为与构架1侧面平行的半圆柱型罩体,其内设有气囊11,所述气囊11设有电磁排气阀;
所述构架1中还设有微型气泵13,所述微型气泵13的输出口与气囊11联通;
所述构架1内还设有能源装置和微机电控装置;
也就是说,能够通过旋转前臂2和后臂3使前臂2中的螺旋桨4提供向前的推力而使后臂3的螺旋桨4提供向两侧的推力,同时配合气囊11充气使本发明无人机能够在漂浮在水面上行驶和旋转,使其能够执行水面和空中的任务。
本实施例中,每个所述前臂2中的前臂转轮6为有凸起形状的凸轮,其远离转轴的一端铰接有转轮连杆7,两侧的转轮连杆7通过与其可转动地连接的连接轴8共同连接到滑块组件9中,所述滑块组件9与构架1可沿其长度方向滑动地连接;
且,所述前臂2旋转到水平时,所述前臂转轮6的凸起形状位于靠近后臂3方向且稍向下倾斜,所述滑块组件9滑动到最靠近后臂3一端;
所述前臂2旋转到垂直时,所述前臂转轮6的凸起形状位于下方,所述滑块组件9滑动到最靠近前臂2一端;
也就是说,所述前臂2限制在水平到垂直的90°范围内旋转。
本实施例中,每个所述后臂3个通过一根万向连杆14与滑块组件9连接,所述万向连杆14连接在后臂3中后臂铰链17与螺旋桨4叶片末梢间的位置;
且,所述后臂3旋转到水平时,所述滑块组件9滑动到最靠近后臂3一端,所述前臂2旋转到垂直时,所述滑块组件9滑动到最靠近前臂2一端;
且,所述后臂3中连接的螺旋桨4的高度小于两个后臂铰链17间距的1/2。
请参阅图2,本实施例中,所述构架1中心沿长度方向开设有导轨5,所述导轨5中与其滑动配合地连接有滑块组件9,所述导轨5内的一侧开设有齿条51;
所述滑块组件9还通过伺服伸缩杆16与构架1连接,所述伺服伸缩杆16的缸体与构架1固定连接,其的活塞杆与滑块组件9固定链接。
请参阅图3,本实施例中,所述滑块组件9中设有能够通过旋转将其锁止在导轨5中或解锁的解锁转块81,所述解锁转块81固定连接在其一侧的连接轴8中,所述解锁转块81远离连接轴8的一端铰接有解锁连杆82;
气囊壳体10靠近滑块组件9一端的端面中可上下转动地铰接有端盖12,且其铰链处设有扭力弹簧,使得所述端盖12在气囊11未充气时垂直,在其充气后能够被顶开而向趋于水平的方向转动,所述端盖12远离气囊11的一面与解锁连杆82铰接;
当端盖12垂直,且滑块组件9位于最靠近后臂3一端时,解锁连杆82拉动解锁转块81旋转到使滑块组件9锁止在导轨5中,而随着端盖12向趋于水平的方向转动,滑块组件9解锁;
且,当滑块组件9向前臂2方向移动时,端盖12能够被解锁连杆82拉动继续向上方旋转而滑块组件9保持解锁状态;
也就是说,当气囊11未充气时,滑块组件9向前臂2方向的移动内锁止,需要气囊11充气后,滑块组件9方能向前臂2方向移动,从而确保本发明无人机降落到水面或地面后才能使前臂2和后臂3向垂直方向旋转,避免由于误操作或系统错误使无人机在空中时前臂2和后臂3向垂直方向旋转而失去上升力,从而引发安全事故。
请参阅图4,本实施例中,所述滑块组件9包括滑块外壳91、齿轮92,所述滑块外壳91与导轨5可滑动地连接,所述滑块外壳91两侧与连接轴8可转动地连接,所述滑块外壳91底部可转动地连接有齿轮92,所述齿轮92与导轨5一侧的齿条51啮合,也就是说,当滑块外壳91在导轨5中滑动时,齿轮92同时受齿条51作用而旋转。
本实施例中,所述齿轮92靠近滑块外壳91的一面中开设有棘轮凹槽94,所述棘轮凹槽94内对应的滑块外壳91底部设有锁止组件95,所述锁止组件95能够通过对棘轮凹槽94进行锁止或解锁;
且,所述棘轮凹槽94的齿向使得锁止组件95能够锁止滑块外壳91向靠近前臂2方向的移动。
本实施例中,所述锁止组件95包括底盘951、棘齿952,所述底盘951固定连接在滑块外壳91底部,所述底盘951边缘圆周可旋转地与多个棘齿952的中间连接;
所述棘齿952旋转到与底盘951半径重合使能够抵靠在棘轮凹槽94中,而向与底盘951半径相切的方向旋转使能够离开棘轮凹槽94的位置;
所述底盘951中间可转动地设有转盘953,所述转盘953边缘通过多根棘齿连杆954与每个棘齿952靠近圆心一端铰接;
也就是说,通过旋转转盘953能够通过棘齿连杆954拉动棘齿952旋转以靠近或离开棘轮凹槽94的齿,以锁止或解锁齿轮92的旋转,从而锁止或解锁滑块外壳91在导轨5中的滑动。
请参阅图5,本实施例中,所述滑块外壳91内设有直角布置的伞齿轮组96,所述伞齿轮组96的水平伞齿轮与连接轴8固定连接,其的垂直伞齿轮与滑块外壳91底部可转动地连接并与转盘953固定连接;
且,当端盖12垂直,且滑块组件9位于最靠近后臂3一端时,解锁连杆82拉动解锁转块81和连接轴8旋转,使伞齿轮组96带动转盘953,从而使棘齿952旋转到抵靠在棘轮凹槽94的齿中,以锁止滑块组件9;
同理,随着端盖12向趋于水平的方向转动,棘齿952向远离棘轮凹槽94的齿的方向旋转,以解锁滑块组件9。
本实施例中,所述齿轮92的齿与棘轮凹槽94间开设有一圈连接滑槽93,所述滑块外壳91通过底部的凸起与齿轮92的连接滑槽93可转动地连接。
具体实施时,执行水面任务时,微型气泵13给气囊11充气,使本发明无人机漂浮在水面;
同时,气囊11顶开端盖12向趋于水平的方向转动,通过解锁连杆82拉动解锁转块81和连接轴8旋转,使伞齿轮组96带动转盘953,棘齿952向远离棘轮凹槽94的齿的方向旋转,解锁滑块组件9;
伺服伸缩杆16拉动滑块组件9向靠近前臂2的一端移动,滑块组件9上连接的转轮连杆7和万向连杆14分别带动前臂2和后臂3向垂直方向旋转,使前臂2中的螺旋桨4提供向前的推力而使后臂3的螺旋桨4提供向两侧的推力;
执行空中任务时,伺服伸缩杆16拉动滑块组件9向靠近后臂3的一端移动,同理,前臂2和后臂3向水平方向旋转,使所有螺旋桨4提供上升力;
并且,气囊11中的电磁排气阀排出气囊11内的气体,减少空气阻力,气囊11旋转到垂直方向,同理,滑块组件9锁止。
以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种具有多驱动系统的无人机
- 一种驱动系统及具有该驱动系统的电动车