带有报警功能的分离式智能自动化作业平台及其工作方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及自动化制造领域,具体的是带有报警功能的分离式智能自动化作业平台及其工作方法。
背景技术
自动化是指机器设备、系统或过程(生产、管理过程)在没有人或较少人的直接参与下,按照人的要求,经过自动检测、信息处理、分析判断、操纵控制,实现预期的目标的过程。自动化技术广泛用于工业、农业、军事、科学研究、交通运输、商业、医疗、服务和家庭等方面。采用自动化技术不仅可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,而且能扩展人的器官功能,极大地提高劳动生产率,增强人类认识世界和改造世界的能力。因此,自动化是工业、农业、国防和科学技术现代化的重要条件和显著标志。
目前,在加工业等领域,各个工厂为了提升工艺,保证产品质量,降低人力,增加效益,都在积极整合、改造或升级自己的自动化水平,对于制造行业来说,自动化的装置可以大大减少生产制造的时间和人力,自动化装置有效促进了制造行业的发展,而分离式自动化作业平台对于一些手机或者是其他的零部件制造来说,运用范围较广。
在自动化作业平台的使用过程中,因为使用者的疲劳、走神等原因出现的失误操作,可能会出现对操作工件的误伤,甚至是对使用者本身造成损害。
发明内容
为解决上述背景技术中提到的不足,本发明的目的在于提供带有报警功能的分离式智能自动化作业平台及其工作方法,本发明旨在作业的过程中能够减少因为失误操作造成的对物件和对操作者本身造成的伤害;
同时,本发明在使用时,出现异常情况时能够发出警告信号,提醒周围其他操作者进行远离或施救。
本发明的目的可以通过以下技术方案实现:
带有报警功能的分离式智能自动化作业平台,包括支撑机构,其特征在于,所述的顶端活动连接有旋转机构,旋转机构的顶端设置有夹持机构,的顶端固定连接有控制机构。
进一步地,所述支撑机构包括底座,底座顶部设置有工作台,工作台内侧开设有分离移动槽。
进一步地,所述旋转机构包括底板,底板顶端开设有轨槽,底板顶端固定连接有固定底板,固定底板前端固定连接有推进气缸,推进气缸前端设置有推进气缸输出杆,推进气缸输出杆远离推进气缸的一端固定连接有移动板,移动板底端固定连接有第一推动齿杆,移动板底端固定连接有第一滑动承载机构,第一滑动承载机构设置于第一推动齿杆侧壁,第一推动齿杆齿部啮合有第二旋转齿轮,第二旋转齿轮顶部固定连接诶有第二旋转支架,第一滑动承载机构底端设置有第一滑轨,第一滑轨底部固定连接有第一限位挡板,第一限位挡板前端顶部固定连接有限位螺母,第一滑动承载机构一侧设置有第二滑动承载机构,第二滑动承载机构底部设置有第二滑轨,第二滑动承载机构侧部设置有第二推动齿杆,第二推动齿杆固定连接于轨槽底部,第二推动齿杆输出端齿接有第一旋转齿轮,第一旋转齿轮顶端固定连接有第一旋转支架,底部固定连接有旋转底座,旋转底座远离的一端活动连接于底板顶部。
进一步地,所述夹持机构包括活动支架,活动支架内侧壁开设有纵向移动滑槽,纵向移动滑槽内侧活动连接有连接控制支架,连接控制支架外侧固定连接有夹持悬梁,夹持悬梁顶端固定连接有气缸固定板,气缸固定板顶端有气缸固定架,气缸固定架侧壁固定连接有主动气缸,主动气缸的输出端贯穿气缸固定架的侧壁固定连接有移动连接板,移动连接板底端固定连接有主动移动连接支架,主动移动连接支架顶端远离移动连接板的一侧固定连接有活动移动连杆,主动移动连接支架对应活动移动连杆的底部固定连接有控制移动连杆,主动移动连接支架底部固定连接有主动夹持连接杆,控制移动连杆远离活动支架的一端设置有移动核心旋转盘,移动核心旋转盘底部固定连接有多个感应机构,移动核心旋转盘顶端设置有从动移动连杆,从动移动连杆远离活动支架的一端固定连接有从动移动连接支架,从动移动连接支架底部固定连接有从动夹持连接杆。
进一步地,所述控制机构包括报警呼出装置,报警呼出装置一侧设置有控制装置,控制装置顶部固定连接有控制按钮,控制装置顶端设置有状态显示屏。
本发明的有益效果:
1、本发明通过设置活动式的底板,让整个机构可分离,在设备维修的过程中不必整个机构完全停工,提高工作效率;
2、本发明在使用时,通过设置有感应机构和报警机构,在发现异常操作或状态时直接进行紧急停止,同时发布报警信号,呼叫其他人员进行远离或施救,避免延误抢救时机。
附图说明
下面结合附图对本发明作进一步的说明。
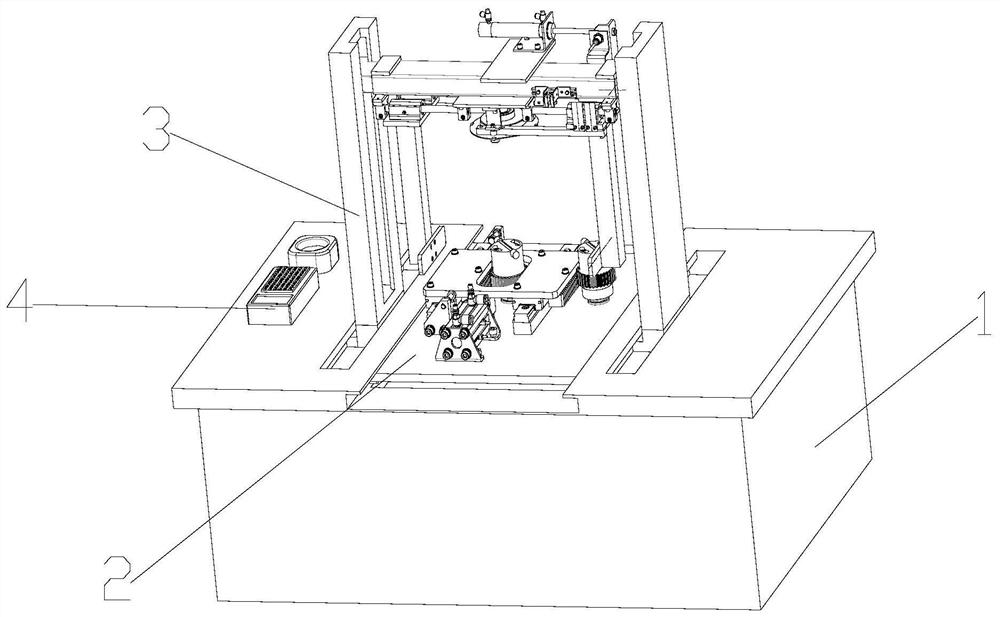
图1是本发明整体结构示意图;
图2是本发明底侧角度的示意图;
图3是本发明整体结构示意图。
图中:1、支撑机构;11、底座;12、工作台;13、分离移动槽;2、旋转机构;21、底板;22、轨槽;23、固定底板;24、推进气缸;25、推进气缸输出杆;26、移动板;27、第一推动齿杆;28、第一滑动承载机构;29、第一滑轨;210、第一限位挡板;211、限位螺母;212、第二滑动承载机构;213、第二滑轨;214、第二推动齿杆;215、旋转底座;216、第一旋转齿轮;217、第一旋转支架;218、第二旋转支架;219、第二旋转齿轮;3、夹持机构;31、活动支架;32、纵向移动滑槽;33、连接控制支架;34、夹持悬梁;35、气缸固定板;36、气缸固定架;37、主动气缸;38、移动连接板;39、活动移动连杆;310、主动移动连接支架;311、控制移动连杆;312、主动夹持连接杆;313、移动核心旋转盘;314、感应机构;315、从动移动连杆;316、从动移动连接支架;317、从动夹持连接杆;4、控制机构;41、报警呼出装置;42、控制装置;43、控制按钮;44、状态显示屏。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“开孔”、“上”、“下”、“厚度”、“顶”、“中”、“长度”、“内”、“四周”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
带有报警功能的分离式智能自动化作业平台及其工作方法,如图1所示,支撑机构1的顶端活动连接有旋转机构2,旋转机构2的顶端设置有夹持机构3,支撑机构1的顶端固定连接有控制机构4,夹持机构3具有扭动和夹紧的功能,实现对待处理工件的变形的功能。
如图2和3所示,支撑机构1包括底座11,底座11顶部设置有工作台12,工作台12内侧开设有分离移动槽13,分离移动槽提供了让整个夹持机构3进行纵向移动的功能。
旋转机构2包括底板21,底板21顶端开设有轨槽22,底板21顶端固定连接有固定底板23,固定底板23前端固定连接有推进气缸24,推进气缸24前端设置有推进气缸输出杆25,推进气缸输出杆25远离推进气缸24的一端固定连接有移动板26,移动板26底端固定连接有第一推动齿杆27,移动板26底端固定连接有第一滑动承载机构28,第一滑动承载机构28设置于第一推动齿杆27侧壁,第一推动齿杆27齿部啮合有第二旋转齿轮219,第二旋转齿轮219顶部固定连接诶有第二旋转支架218,第一滑动承载机构28底端设置有第一滑轨29,第一滑轨29底部固定连接有第一限位挡板210,第一限位挡板210前端顶部固定连接有限位螺母211,第一滑动承载机构28一侧设置有第二滑动承载机构212,第二滑动承载机构212底部设置有第二滑轨213,第二滑动承载机构212侧部设置有第二推动齿杆214,第二推动齿杆214固定连接于轨槽22底部,第二推动齿杆214输出端齿接有第一旋转齿轮216,第一旋转齿轮216顶端固定连接有第一旋转支架217,第一旋转齿轮216底部固定连接有旋转底座215,旋转底座215远离第一旋转齿轮216的一端活动连接于底板21顶部,通过推进气缸24的输出,为整个机构提供了并机移动的原动力。
夹持机构3包括活动支架31,活动支架31内侧壁开设有纵向移动滑槽32,纵向移动滑槽32内侧活动连接有连接控制支架33,连接控制支架33外侧固定连接有夹持悬梁34,夹持悬梁34顶端固定连接有气缸固定板35,气缸固定板35顶端有气缸固定架36,气缸固定架36侧壁固定连接有主动气缸37,主动气缸37的输出端贯穿气缸固定架36的侧壁固定连接有移动连接板38,移动连接板38底端固定连接有主动移动连接支架310,主动移动连接支架310顶端远离移动连接板38的一侧固定连接有活动移动连杆39,主动移动连接支架310对应活动移动连杆39的底部固定连接有控制移动连杆311,主动移动连接支架310底部固定连接有主动夹持连接杆312,控制移动连杆311远离活动支架31的一端设置有移动核心旋转盘313,移动核心旋转盘313底部固定连接有多个感应机构314,移动核心旋转盘313顶端设置有从动移动连杆315,从动移动连杆315远离活动支架31的一端固定连接有从动移动连接支架316,从动移动连接支架316底部固定连接有从动夹持连接杆317。
控制机构4包括报警呼出装置41,报警呼出装置41一侧设置有控制装置42,控制装置42顶部固定连接有控制按钮43,控制装置42顶端设置有状态显示屏44,使用者可通过状态显示屏44直观的观察整个机构的工作状态。
所述的一种带有报警功能的分离式智能自动化作业平台,其特征在于,包括以下步骤:
步骤一:将待处理的工件放置于第一旋转支架217和第二旋转支架218之上。
步骤二:通过调整控制按钮43,调整旋转机构2和夹持机构3的移动。
步骤三:开动推进气缸24,使其带动第一滑动承载机构28和第二滑动承载机构212转动,使得第一旋转支架217和第二旋转支架218并机转动,达到需要的位置时便可以停止固定底板23以固定位置。
步骤四:调整控制按钮43,控制主动气缸37的输出,以此调整主动气缸37连接的移动连接板38的位置,进而调整移动连接板38所连接的控制移动连杆311的位置,带动移动核心旋转盘313顶端转动轮的旋转。
步骤五:通过上述的步骤达到控制主动夹持连接杆312和从动夹持连接杆317的位置,进而对安置于第一旋转支架217和第二旋转支架218的处理。
步骤六:在使用的过程中,若感应机构314检测到主动夹持连接杆312在工作过程中有异常,立刻控制移动核心旋转盘313顶端的转动轮停止旋转,并停止其他机构的运作。
步骤七:在上一步骤完成后,报警呼出装置41立刻开始发出报警信号。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
- 带有报警功能的分离式智能自动化作业平台及其工作方法
- 带有报警功能的分离式智能自动化作业平台及其工作方法