一种适用于潜伏式机器人搭载的油泥在线清理模块
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及一种适用于潜伏式机器人搭载的油泥在线清理模块,属于储罐油泥在线清理技术领域。
背景技术
石油作为国家重要的战略资源,是工业的血液。截止到2020年,我国共建成9个国家石油储备基地,总储备库容为3773万立方米。石油储罐安全运行的主要隐患是储罐底板腐蚀等缺陷导致的储液泄漏。目前在成本高、效率低的开罐检测技术基础上发展而来的在线检测技术已成为新的发展方向,主要有声发射在线检测、超声导波在线检测和机器人在线检测三种,其中能定量检测的机器人在线检测技术有着很好的应用前景。
目前在役储罐腐蚀检测机器人在工作时会因储罐底板存在的一种胶状物质——油泥使得机器人对储罐底板腐蚀检测的结果不准确甚至无法检测。罐底油泥是石油在储运过程中,油品中本身含有和后来渗入的泥沙、重金属盐类等杂质会在重力作用下,在罐底沉积而成;罐底油泥约占罐容的1%-2%,不仅影响储罐容积、降低油品质量,还会加剧储罐底板的腐蚀。油泥的清理一直是石油储运行业比较棘手的问题。
当前油泥清理技术存在的问题:(1)现有油泥清理技术主要有人工进罐清理、机械系统清理、机器人进罐清理,但都是进行开罐清理,不仅需要腾空储罐内油液,还涉及停工停产,耗资巨大,且存在一定的安全性问题;(2)目前仅有的油泥在线吹扫技术搭载于在役储罐腐蚀检测机器人,专利号为201810284505.3,采用射流技术对油泥进行吹扫,但也仅仅只是单一的清理技术,清理效果欠佳,效率低下,对于油泥只是进行储罐内一个位置的移动,并非移出罐外,影响下次检测;(3)储罐内开放的清理环境还会使得被激起的油泥影响机器人的定位精度和视觉效果;(4)成品油油泥和原油油泥的粘度以及硬度不同,造成了清理方法的不同,针对这两种油泥的清理,往往需要不同的清理装置,费时费力。
因此,对于油泥在线清理迫切需要一种清理效果好、适用范围广的清理装置。
发明内容
针对当前开罐清理繁琐、在役储罐腐蚀检测机器人清理技术影响检测效果、清理方法单一、无法适应多种油泥清理等问题,本发明提出了一种适用于潜伏式机器人搭载的油泥在线清理模块,复合式清理方法、模块化设计,提高了清理效率,增大该清理装置的适用范围,实现油泥在线清理的目标。
一种适用于潜伏式机器人搭载的油泥在线清理模块,包括罩体、滚刷、刷毛、喷头、泵吸口;其特征在于:所述罩体位于机器人主舱下方,且下方悬空,刷毛粘结在罩体下方,刷毛底部与储罐底板相接触,两者共同组成相对封闭的空间;所述喷头安装在罩体前壁,滚刷通过滚刷轴安装在罩体两侧壁上,喷头高于滚刷,滚刷轴在罩体外连接动力元件;所述泵吸口置于罩体顶部。
所述喷头与罩体内壁成一角度,并且该角度调整范围为0-70°。
所述滚刷轴心线与喷头喷射方向成空间垂直,滚刷旋转方向与喷头喷射方向相反。
所述滚刷为模块化设计,采用刷毛组件换为螺旋钻组件的方法来对较硬的原油罐底油泥进行清理。
本发明提供的一种适用于潜伏式机器人搭载的油泥在线清理模块,所述罩体承载喷头、泵吸口,与刷毛共同组成相对封闭空间;所述喷头通过喷射一定压力的同种油介质对罩体内油泥进行剪切破坏以及流化作用;所述滚刷用于辅助清理油泥,将罩体内流化的油泥浆和油液充分混合;所述泵吸口连接罐外泵机,用于将罩体内的油泥固液混合物抽出储罐。
与已有技术相比,本发明具有以下优点:
1、复合式的清理方法,有利于提高清理效率与加强清理效果。
2、罩体、刷毛与泵吸口相配合,避免了激起油泥带来的浑浊现象对机器人视觉和定位精度的影响,实现在线清理油泥的目标。
3、罩体下方刷毛的存在避免了机器人移动过程中罩体与储罐底板发生碰撞的可能。
4、模块化的设计思路,滚刷可替换成螺旋钻以此来实现对原油油泥的清理。
附图说明
图1为本发明在机器人整体结构中的位置示意图。
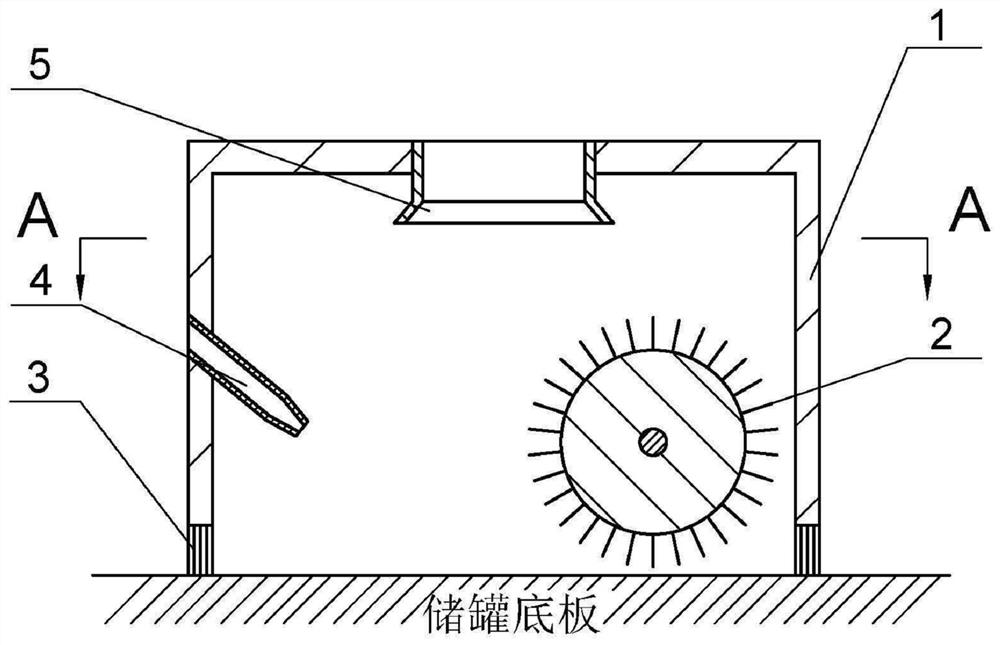
图2为本发明图1所示主视图的剖视图。
图3为本发明图2所示俯视图的剖视图。
图4为本发明搭载于潜伏式机器人的工作状态示意图。
图5为本发明三维图。
图中:1.罩体、2.滚刷、3.刷毛、4.喷头、5.泵吸口。
具体实施方式
下面结合附图对本发明做进一步说明。
实施例1:如图1、图2、图3、图4、图5所示,一种适用于潜伏式机器人搭载的油泥在线清理模块包括:罩体1、滚刷2、刷毛3、喷头4、泵吸口5。所述罩体(1)位于机器人主舱下方,且下方悬空,刷毛(3)粘结在罩体(1)下方,刷毛底部与储罐底板相接触,两者共同组成相对封闭的空间;所述喷头(4)安装在罩体前壁,滚刷(2)通过传动轴安装在罩体两侧壁上,喷头(4)高于滚刷(2),滚刷轴在罩体(1)外连接动力元件;所述泵吸口(5)置于罩体(1)顶部。
如图2所示所述喷头4与滚刷2分别安装在罩体侧壁上,且喷头4安装位置高于滚刷2,滚刷2轴心线与喷头4喷射方向成空间垂直;滚刷2的旋转方向为图示顺时针方向,便于清理油泥以及混合油液;所述泵吸口5置于罩体顶部。
如图2所示所述喷头4与罩体1内壁成一角度,并且该角度调整范围为0-70°,
如图2所示所述滚刷2为模块化设计,采用刷毛组件换为螺旋钻组件的方法来对较硬的原油罐底油泥进行清理。
如图3所示罩体俯视图中一侧壁内凹,用于为滚刷2安装动力元件。
如图4所示为本发明搭载于潜伏式机器人的工作示意图,喷头4喷射介质配合滚刷2所示旋转共同清理罐底油泥,滚刷2将经过油射流冲击后形成的油泥块或者油泥浆与罩体内油液混合,泵吸口5由罐外泵机提供吸力将罩体内油泥、油液混合物吸出储罐。
如图5所示为本发明的简易三维图,旨在真实反映本发明中各装置空间位置关系。
喷头4的喷射介质采用与罐内相同的油品,喷头4的进油端与机器人的脐带缆油管的出油端相连,油管的进油端通过罐外泵机与罐外喷射介质储备罐相连;泵吸口5进料端(大端)朝下,出料端(小端)与脐带缆内软管进料端相连,软管出料端与罐外过滤装置相连;滚刷2动力元件安装在罩体两侧内凹部位。
其工作原理为:
机器人进罐到达指定的油泥清扫点后,开启罐外泵机,喷头4由罐外泵机提供高压射流对罩体1内油泥进行流化以及剪切破坏,与喷头4喷射方向成空间垂直的的滚刷2进行辅助清理,清理射流冲击过后剩余在罐底板上的油泥,喷头4与罩体1内壁所成角度可在0-70°内调整,确保不同性质的油泥有着不同的喷射角,有利于提高效率和使用范围;罩体1与刷毛3形成的相对封闭空间能够防止被射流、滚刷2激起的油泥扩散至罩体外,将“浑浊”的油液隔绝在罩体内,避免其影响机器人的视觉和超声定位精度的影响,同时提高抽吸效果;而刷毛3的存在使得机器人在储罐底板移动的过程中不会与储罐底板的焊接痕迹发生碰撞,避免了在对油泥进行清扫的过程中对储罐底板造成损伤;泵吸口5可将罩体1内的油泥、油液混合物通过罐外泵机抽出罐外,并将混合物通过罐外过滤装置将油泥和油液分开,油液可再次通往罐内。
本发明对罐底油泥采用复合式的清理方法,结构简单,清理高效;设计抽吸的结构,达到在线清理、资源循环的目的;针对原油油泥在不改变整体结构的前提下,仅更换一个组件便能满足相应的功能,通用性好,适应性强。
- 一种适用于潜伏式机器人搭载的油泥在线清理模块
- 一种适用于IGBT模块行业的高精度标准化在线式灌胶机