一种拖曳线列阵阵形实时测量系统
文献发布时间:2023-06-19 11:49:09
技术领域
本发明属于水声工程领域,具体涉及一种拖曳线列阵阵形实时测量系统。
背景技术
拖曳线列阵声纳是一种探测潜艇的有效技术手段,应用越来越广泛,但受到海流和拖曳载船的机动,拖曳过程中拖曳线列阵不可能始终保持理想直线状态,而这种阵形的误差将直接影响声纳探测性能和角度测量精度,需要精确获得拖曳线列阵的阵形参数,以进行补偿。
现在通常采用以下两种方法:利用拖曳线列阵中嵌入的姿态传感器,通过姿态传感器中的航向角对阵形进行判断,选取其中阵形较理想的部分阵元进行处理,显然这种方法缩短了探测阵列的有效长度,降低了系统性能;采用信号处理的方法,利用接收的信号对阵形进行估计,但这种方法存在性能不稳健、难以验证的问题。
专利公告号为201611009284.6的中国发明专利公开了一种海底缆线定位声纳系统及定位方法,以下简称海底缆线定位专利,本专利与之不同之处在于:海底缆线定位专利被定位的目标为静态布置海底缆线,而本发明被定位的目标为动态运动的拖曳线列阵;海底缆线定位专利发射声源需采用3个或3个以上,而本发明专利则只需2个或2个以上;海底缆线定位专利需获取移动平台自身位置信息和姿态信息,解算的位置也为相对大地坐标系的绝对位置,而本专利则无需获取移动平台自身位置信息和姿态信息,解算的位置也是相对发射声源的相对位置。
鉴于此,目前亟待提出一种无需获取移动平台自身位置和姿态信息对拖曳线列阵进行阵形估计的一种拖曳线列实时测量系统。
发明内容
为此,本发明所要解决的技术问题是提供一种无需获取移动平台自身位置和姿态信息对拖曳线列阵进行阵形估计的一种拖曳线列实时测量系统及方法。
本发明的系统,包括拖曳母船和与所述拖曳母船连接的拖曳线列阵,还包括发射声源、水听器以及信号处理系统;
所述发射声源用于向所述水听器发射声源信号;
所述水听器间隔设于所述拖曳线列阵上,用于接收声源信号;
所述信号处理系统用于处理声源信号以及所述水听器的返回信号;
所述系统通过如下方法计算拖曳线列阵阵形,包括如下步骤:
S1:至少两个发射声源同时向所述水听器发射两个相互正交的声源信号;
S2:所述水听器将接收到的声源信号转换为光信号和/或电信号,并将转换后的信号传输至数据处理系统;
S3:计算各所述水听器与各所述发射声源之间的距离差;获取拖曳线列阵上各所述水听器的绝对深度信息,并计算各所述水听器与所述发射声源的相对位置,然后,计算拖曳线列阵中各所述水听器的位置;
S4:通过各水听器的位置计算出拖曳线列阵的阵形。
进一步的,所述发射声源包括发射机、信号源以及发射换能器;所述信号源用于产生编码信号,所述发射机用于将编码信号进行功率放大;所述发射换能器用于将编码信号转换为声源信号。
进一步的,所述发射声源为固定安装在拖曳载船上,或与拖曳线列阵共同拖曳于水中。
进一步的,所述水听器为光电水听器和/或压电水听器。
进一步的,S3a:建立等效数学模型,以两个所述发射换能器两者等效中心的连线为x轴,以两个所述发射换能器之间的等效中心为原点,以与x轴位于同一水平面、且与x轴垂直的轴为y轴,以垂直于水平面的轴为z轴;
S3b:通过如下公式计算所述水听器的在z轴上的坐标,
z
其中,d
S3c:设声速为均匀分布的C,水听器与两个所述发射换能器之间的距离为:
其中,
按照如下公式计算第i个水听器的位置:
其中,x
以此类推,测量阵列中所有水听器的位置。
进一步的,步骤S3a中的发射换能器与水听器之间的时间延迟τ通过如下步骤计算:
发射声源向水听器发射信号的同时纪录发射时刻T
信号处理系统处理接收到的信号时纪录到达时刻T
通过发射时刻和到达时刻计算时延τ=T
进一步的,步骤S1中的两个相互正交的声源信号为的互相关为0的多个信号集合;或者,自相关峰值的多个信号集合。
本发明的上述技术方案,相比现有技术具有以下优点:
发明提出一种拖曳线列阵阵形实时测量方法,可在进行目标探测的同时,实时测量拖曳线列阵的阵形参数,具有测量精度高、使用方便、不影响声纳性能等优点,有效地解决了在拖曳过程中拖曳线列阵阵形未知的难题。
附图说明
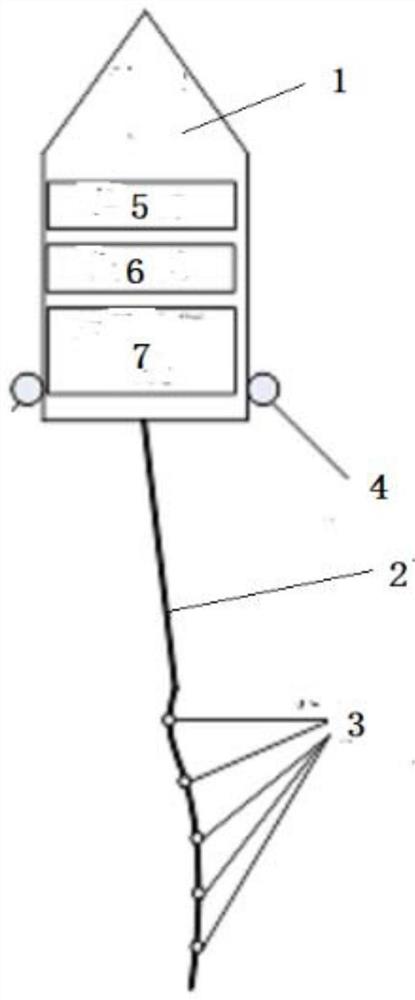
图1是本发明实施例提供的拖曳线列阵阵形实时测量系统的模块连接示意图;
图2是本发明实施例提供的拖曳线列阵阵形实时测量方法的步骤S3中的等效数学模型的坐标示意图;
其中,1、拖曳母船;2、拖曳线列阵;3、水听器;4、发射换能器;5、信号源;6、发射机;7、信号处理系统。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本实施例的拖曳线列阵阵形实时测量系统,如图1-2所示,包括拖曳母船和与所述母船连接的拖曳线列阵,还包括发射声源、水听器以及信号处理系统。
所述发射声源包括发射机、信号源以及发射换能器;所述信号源用于产生编码信号,所述发射机用于将编码信号进行功率放大;所述发射换能器用于将编码信号转换为声源信号。
本实施例的拖曳线列阵由拖曳母船拖曳,在拖曳母船两侧刚性连接由两个发射换能器,拖曳母船上安装信号源、发射机和信号处理系统。信号源产生两路正交的发射信号并由发射机进行功率放大,分别驱动两个发射换能器产生声源信号。
本实施例的系统还包括深度传感器,所述深度传感器设于拖曳线列阵上,用于测量各水听器的深度信息。
本实施例还提供拖曳线列阵阵形实时测量方法,包括如下步骤:
S1:至少两个刚性连接的发射声源同时向所述水听器发射两个相互正交的声源信号。
进一步的,所述正交信号为各信号的互相关为0或远低于各信号自相关峰值的多个信号集合。
进一步的,发射声源向水听器发射信号的同时纪录发射时刻,信号源产生发射信号的同时,将发射信号的发射时刻发送至信号处理系统,拖曳线列阵的水听器为压电水听器。
其中,压电水听器包括信号调理模块和数据采集模块,数据采集模块完成信号的A/D转换并将采集到的数据传输至拖曳母船上的信号处理系统,信号处理系统对各阵元接收到的信号进行信号处理,将两个发射换能器的信号进行分离处理并纪录到达时间,通过发射时间和到达时间计算发射换能器的时延。
S2:所述水听器将接收到的声源信号转换为光信号和/或电信号并返回至数据处理系统。
S3:计算各所述水听器与各所述发射声源之间的距离差r;获取拖曳线列阵中各所述水听器的绝对深度信息d
进一步的,步骤S3具体包括;
S3a:建立等效数学模型,以两个所述发射换能器两者等效中心的连线为x轴,以两个所述发射换能器之间的等效中心为原点,以与x轴位于同一水平面、且与x轴垂直的轴为y轴,以垂直于水平面的轴为z轴;
S3b:通过如下公式计算所述水听器的在z轴上的坐标,
z
其中,d
S3c:设声速为均匀分布的C,水听器与两个所述发射换能器之间的距离为:
其中,
按照如下公式计算第i个水听器的位置:
将z
其中,x
以此类推,重复执行步骤S3中的各步骤,以测量阵列中所有水听器的位置。
进一步的,步骤S3a中的发射换能器与水听器之间的时间延迟τ通过如下步骤计算:
发射声源向水听器发射信号的同时纪录发射时刻T
信号处理系统处理接收到的信号时纪录到达时刻T
通过发射时刻和到达时刻计算时延τ=T
S4:通过步骤S3中得到的所有水听器的位置计算出拖曳线列阵的阵形。
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
- 一种拖曳线列阵阵形实时测量系统
- 一种基于姿态实时测量矢量水听器的拖曳线列阵装置