一种基于相机的悬臂掘进机测量系统
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及工程建设技术领域中的悬臂掘进机,特别是涉及一种基于相机的悬臂掘进机测量系统。
背景技术
悬臂掘进机是一种挖掘公路隧道和煤矿常用的掘进设备,有着安装方便、操作灵活、成本低、效率高的特点,但是掘进过程震动较大,钻头前部粉尘大,导致不论人工还是设备都难以准确测量钻头位置,更加难以控制,而如果没有准确的钻头位置和姿态数据为基础,便无法计算出实时的超欠挖情况,更加无法进行掘进机的自动控制了。
目前使用的导向系统有传统单台全站仪导向系统和双台全站仪导向系统,其中传统的单台全站仪导向系统在使用过程中只能追踪一个棱镜,因此只能假设悬臂掘进机机身不发生水平转动,而悬臂掘进机在实际工作中不可能不发生水平转动,而传统的单台全站仪测量系统缺乏这个必要数据,导致测量精度较差;双台全站仪方案除了设备成本高之外,由于要求两台全站仪和两个棱镜之间完全通视,因此要求测量通道较大,在测量通道较小或者遮挡较多的隧道施工中会遇到使用上的限制,另外两台全站仪很难保证严格的测量同步,测量的不同步在震动较大的悬臂掘进机工作中会引起一定的数据跳动。
发明内容
本发明所要解决的技术问题是提供一种基于相机的悬臂掘进机测量系统,能够在通视条件较差的隧道内向施工的悬臂掘进机提供精确的导向数据。
本发明解决其技术问题所采用的技术方案是:提供一种基于相机的悬臂掘进机测量系统,包括:棱镜,设置在所述悬臂掘进机的尾部;一台全站仪,设置在隧道壁上,用于跟踪所述棱镜并得到所述棱镜的坐标数据;倾角仪,设置在所述悬臂掘进机内部中间位置,用于检测悬臂掘进机主体的俯仰角数据;标志点,设置在所述隧道壁上;相机,设置在所述悬臂掘进机尾部,用于向所述标志点进行拍摄,并根据拍摄的图片检测悬臂掘进机主体的方位角数据;所述计算机分别与所述全站仪、倾角仪和相机相连,并根据所述坐标数据、俯仰角数据和方位角数据计算悬臂前端钻头的位置数据。
所述棱镜有两个,分别位于所述悬臂掘进机尾部的两侧。
所述全站仪的测量范围大于150度,且最高频率为20Hz。
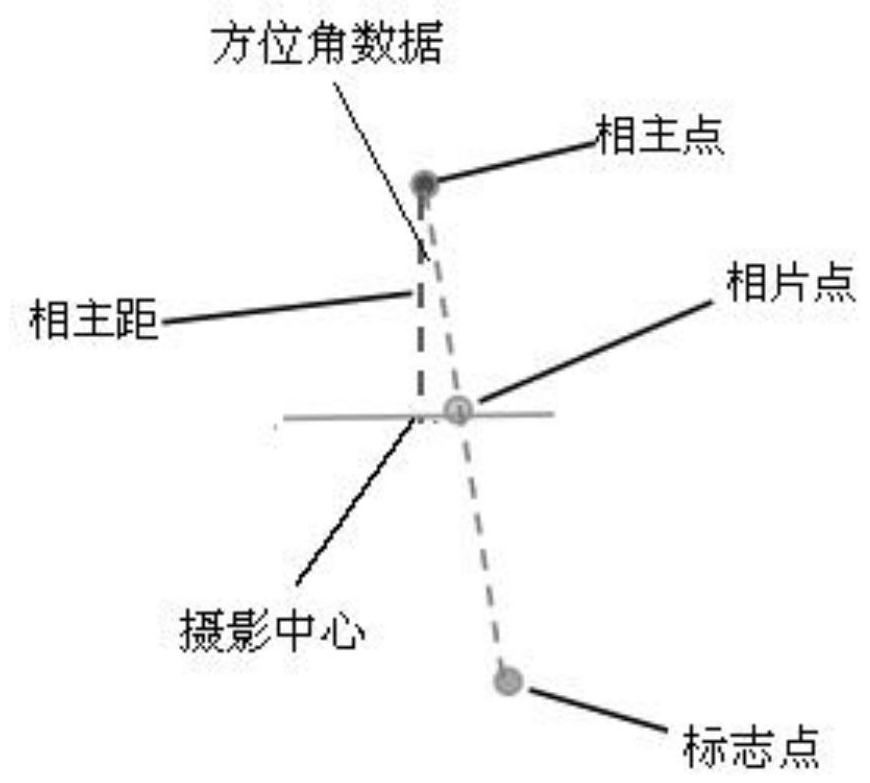
所述相机根据拍摄的图片检测悬臂掘进机主体的方位角数据具体包括:通过相机标定建立坐标系,并基于内方位元素得到相主点和摄影中心的坐标位置,过所述摄影中心建立与相主距所在直线相互垂直的直线,并使得所述直线与所述相主点和所述标志点的连线相交,得到相片点的坐标位置,基于所述相片点的坐标位置、相主点的坐标位置和摄影中心的坐标位置得到相主距与所述相主点和所述标志点的连线的夹角,所述夹角为方位角数据。
X=X1+D*cos(azimuth)
所述计算机通过Y=Y1+D*sin(azimuth)计算悬臂前端钻头的位置数据时,其中,
Z=Z1+D*tan(pitch)
X,Y,Z为悬臂与掘进机机身转轴中心点的位置;X1,Y1,Z1为所述棱镜的坐标数据;D为悬臂与掘进机机身转轴中心点距离所述棱镜的空间距离;azimuth=azimuth0+α,azimuth为所述悬臂掘进机机身的当前方位角,azimuth0为所述悬臂掘进机机身的初始方位角;α=T1-T0,其中,T1为所述相机检测的当前方位角数据,T0为所述相机检测的初始方位角数据;pitch为所述倾角仪检测到的俯仰角数据。
有益效果
由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明通过增加一个相机和一个标志点,利用相机和标志点对悬臂掘进机工作过程中的方位角进行实时更新,确保了测量精度,同时利用该相机后可以只是用一台全站仪追踪棱镜,因此能够在通视条件较差的隧道内使用,且不需要考虑测量同步问题,使用更为方便。
附图说明
图1是本发明中悬臂掘进机测量系统的背面剖视图;
图2是本发明中悬臂掘进机测量系统的侧面剖视图;
图3是本发明中利用相机获取方位角数据的原理图。
具体实施方式
下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
本发明的实施方式涉及一种如图1所示,包括:棱镜4,设置在所述悬臂掘进机1的尾部;一台全站仪3,设置在悬臂掘进机1尾部附近的隧道壁2上,用于跟踪所述棱镜4并得到所述棱镜的坐标数据;倾角仪5,设置在所述悬臂掘进机1内部中间位置,用于检测悬臂掘进机1主体的俯仰角数据;标志点8,设置在悬臂掘进机1尾部附近的隧道壁2上,用于为相机6提供固定可识别目标;相机6,设置在所述悬臂掘进机1尾部位置,用于拍摄标志点8并检测悬臂掘进机1主体的方位角数据;所述计算机分别与所述全站仪、倾角仪和相机相连,并根据所述坐标数据、俯仰角数据和方位角数据计算悬臂前端钻头的位置数据。
本实施方式中棱镜4共有两个,分别位于所述悬臂掘进机尾部的两侧,通过设置两个棱镜4确保全站仪能够找到至少一个棱镜进行锁定。本实施方式中的全站仪3用于测量棱镜4的三维坐标,实现对棱镜4的跟踪锁定,该全站仪3的最高频率可达到20Hz,测量速度快频率高,可提高震动下测量结果的精度,该全站仪测量范围大,可达到不低于150°的测量范围,如此可降低失锁可能性,并在失锁后可自动搜索,提高自动化程度,降低人工干预度。
使用本实施方式时,在悬臂掘进机静止时进行标定测量,测量过程为全站仪顺序测量两个棱镜的坐标,并读取滚动角和俯仰角,计算出机身的姿态数据和初始方位角azimuth0,使用相机拍摄固定标志点并计算出检测到的初始方位角数据T0。
相机测量的原理如图3所示,相机安装之后与悬臂掘进机的机身固定,可以认为相机的水平转动角度就是悬臂掘进机的机身的水平转动角度。图3中通过相机标定建立坐标系,相主点和相主距(即相机的内方位元素)可以通过标定的方式计算得到,如此便可以得到相主点的坐标位置和摄影中心的坐标位置,过所述摄影中心建立与相主距所在直线相互垂直的直线,并使得所述直线与所述相主点和所述标志点的连线相交,由于标注点是固定的因此标志点的坐标在坐标系建立后即可得到,基于标志点的坐标和相主点的坐标可以得到标志点与相主点的直线方程,再根据摄影中心的坐标就可以得到相片点的坐标位置,基于所述相片点的坐标位置、相主点的坐标位置和摄影中心的坐标位置得到相主距与所述相主点和所述标志点的连线的夹角,该夹角就是相机采集的方位角数据。
当标志点固定不动而相机发生转动时,可以通过相机记录的两次方位角数据,并将其相减,就可以得到相机在这段时间内的转动角度。在实际使用中,在标定测量时,相机拍摄标志点,记录此时方位角数据为初始方位角数据,在工作中实时拍摄标志点得到实测的方位角数据,实测的方位角数据减去初始方位角数据即可得到这段时间相机的转动角度α,将悬臂掘进机机身的初始方位角与该角度相加,就能得到悬臂掘进机机身的当前方位角。
在测量时,计算机控制全站仪自动搜索并锁定一个棱镜,进行1-20Hz的自动测量,测量得到棱镜的三维坐标数据,并实时读取倾角仪数据获得机身的俯仰角pitch、使用相机拍摄标志点并计算出机身的方位角变化数据,并读取设置在悬臂掘进机的悬臂伸缩缸上用于检测油缸长度的行程传感器7的数据,根据三维坐标数据和俯仰角、方位角数据实时计算出悬臂掘进机的机身位置和姿态数据。具体计算方式如下:
不难发现,本发明通过增加一个相机,利用相机对悬臂掘进机工作过程中的方位角进行实时更新,确保了测量精度,同时利用该相机后可以只是用一台全站仪追踪棱镜,因此能够在通视条件较差的隧道内使用,且不需要考虑测量同步问题,使用更为方便。
- 一种基于相机的悬臂掘进机测量系统
- 一种悬臂掘进机测量系统