一种遥控无人车载式绿篱修剪机
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及绿篱、草地、草坪的修剪动力驱动切割技术领域,特别涉及一种遥控无人车载式绿篱修剪机。
背景技术
现阶段绿篱、草地、草坪的枝条和草茎修复的动力切割装置都是人工手持电动或马达驱动单一或多组旋转刀盘或者是链式刀具,前者是电动或者马达骑过传动轴连接刀盘,后者是电动或者马达通过传动轴连接链轮传动装置。这两类切割装置的缺点是由于人工手持切割工具,作业人员劳动强度大、作业效率低、并伴有安全风险,不适用公园绿地和树林、道路和公路绿化带等大面积的绿篱、草地、草坪、树林的枝条和草茎的修剪。
发明内容
为了解决现有技术存在的问题,本发明提供了一种遥控无人车载式绿篱修剪机。所述遥控无人车载式绿篱修剪机包括:遥控无人载车、固定板、轴套、旋转轴、第一轴承、底座旋转电推杆、底座铰接座、固定板铰接座、底座、主臂、第一销轴、第二销轴、连杆、第三销轴、摇杆、主臂旋转电推杆、第四销轴、第五销轴、第六销轴、外臂旋转电推杆、第七销轴、外臂、切割头箱体、切割头旋转电推杆、第八销轴、第九销轴、第十销轴、马达、曲轴、曲柄连杆、曲柄摇杆、第十一销轴、第十二销轴、单刃刀夹、单刃刀片固定板、第十三销轴、单刃刀片、双刃刀刀夹、双刃刀固定板、双刃刀、上导板、下导板、电控组件、蓄电池组件、第二轴承、第三轴承、第四轴承、第五轴承、第十四销轴。
固定板由螺栓固定在遥控无人载车的平台上,轴套通过螺栓与固定板连接,旋转轴通过轴承与轴套连接,旋转轴通过螺栓固定在底座上,固定板铰接座由螺栓固定在固定板上,底座铰接座由螺栓固定在底座上,第十四的活塞杆端和缸筒端分别通过第十四销轴与固定板铰接座和底座铰接座连接,主臂通过第一销轴与底座和摇杆连接,主臂旋转电推杆的缸筒端通过第四销轴与底座连接,主臂旋转电推杆的活塞杆端通过第五销轴与摇杆连接,外臂旋转电推杆缸筒端通过第七销轴与主臂连接外臂旋转电推杆活塞杆端通过第六销轴与连杆和摇杆连接,主臂通过第二销轴与外臂连接,连杆通过第三销轴与外臂连接,外臂通过第八销轴与切割头箱体连接,切割头箱体旋转电推杆缸筒端通过第九销轴与外臂连接,切割头箱体旋转电推杆活塞杆端通过第十销轴与切割头箱体连接,马达通过螺栓固定在切割头箱体上,马达输出轴通过键与曲轴连接,曲轴通过轴承与曲柄连杆连接,曲柄连杆通过轴承和曲柄连杆-刀夹摇杆销轴与刀夹摇杆连接,二个刀夹摇杆通过轴承和曲柄连杆-刀夹摇杆销轴分别与单刃刀夹和双刃刀夹连接,二个刀夹摇杆分别通过轴承和刀夹摇杆-切割头箱体销轴与切割头箱体连接,单刃刀夹通过螺栓与单刃刀固定板连接,双刃刀夹通过螺栓与双刃刀固定板连接,多个单刃刀片通过铆钉与单刃刀固定板连接,多个双刃刀通过螺栓与双刃刀固定板连接,电控组件和蓄电池组件通过螺栓与底座连接,由遥控无人载车的蓄电池组通过电控组件分别向主臂旋转电推杆、外臂旋转电推杆、切割头旋转电推杆、马达输出电力,由电控组件控制驱动第十四、主臂旋转电推杆、外臂旋转电推杆、切割头旋转电推杆作旋转运动,由电控组件控制马达作回转运动。在遥控无人载车平台上固定的绿篱修剪机实现遥控无人载车遥控和无人规划行驶中完成公园绿地和树林、道路和公路绿化带等大面积的绿篱、草地、草坪、树林的枝条和草茎的安全高效修剪。
所述遥控无人载车的具体类型和参数可根据具体绿篱修剪工况和要求所确定的绿篱修剪机的性能参数进行选择。
所述遥控无人载车后桥固定的绿篱修剪机实现遥控无人载车遥控和按规划行驶过程中完成公园绿地和树林、道路和公路绿化带等大面积的绿篱、草地、草坪、树林的枝条和草茎的安全高效修剪。
所述遥控无人载车的蓄电池组件的电力输出通过电控组件向主臂旋转电推杆、外臂旋转电推杆、切割头旋转电推杆、马达输出电力,驱动底座旋转电推杆、主臂旋转电推杆、外臂旋转电推杆、切割头旋转电推杆旋转和马达回转,实现遥控无人载车式绿篱修剪机底座、主臂、外臂、切割头箱体的旋转和切割头的马达回转运动,完成遥控无人车载绿篱修剪机的机动绿篱修剪工作。
所述固定板由螺栓固定在遥控无人载车平台上,轴套通过螺栓与固定板连接,旋转轴通过轴承与轴套连接,旋转轴通过螺栓固定在底座上,固定板铰接座由螺栓固定在固定板上,底座铰接座由螺栓固定在底座上,底座旋转电推杆的活塞杆端和缸筒端分别通过第十四销轴与固定板铰接座和底座铰接座连接,实现由底座旋转电推杆驱动底座通过旋转轴以轴套为中心在遥控无人载车上的固定板上旋转,完成遥控无人车载绿篱修剪机对遥控无人载车的左、右侧的绿篱、草地、草坪、树林的枝条和草茎的修剪。
所述主臂通过第一销轴与底座和摇杆连接,主臂旋转电推杆的缸筒端通过第四销轴与底座连接,主臂旋转电推杆的活塞杆端通过第五销轴与摇杆连接,外臂旋转电推杆缸筒端通过第七销轴与主臂连接外臂旋转电推杆活塞杆端通过第六销轴与连杆和摇杆连接,主臂通过第二销轴与外臂连接,连杆通过第三销轴与外臂连接,实现通过主臂旋转电推杆活塞杆的伸缩驱动主臂以第一销轴为中心旋转,通过外臂旋转电推杆活塞杆的伸缩驱动外臂以第二销轴为中心旋转,由遥控无人载车电控组件的控制器控制主臂旋转电推杆活塞杆和外臂旋转电推杆活塞杆协调伸缩,驱动主臂和外臂实现同时旋转展开或同时旋转收回,完成底座支承主臂、主臂支承外臂的联合协同伸展和回收运动。
所述切割头箱体通过第八销轴与外臂连接,切割头箱体旋转电推杆缸筒端通过第九销轴与外臂连接,切割头箱体旋转电推杆活塞杆端通过第十销轴连接,通过切割头旋转电推杆活塞杆的伸缩驱动切割头箱体以第八销轴为中心旋转,完成外臂支承的切割头箱体的空间旋转运动。
所述马达通过螺栓固定在切割头箱体上,马达输出轴通过键与曲轴连接,曲轴的二个以曲轴轴线为中心相距180度的曲轴轴通过轴承与曲柄连杆连接,曲柄连杆通过轴承和第十一销轴与二个曲柄摇杆连接,二个曲柄摇杆分别通过轴承和第十三销轴连接,二个曲柄摇杆分别通过第十一销轴和轴承与单刃刀夹和双刃刀夹连接,单刃刀夹通过螺栓与单刃刀片固定板连接,单刃刀片通过铆钉排列固定在单刃刀片固定板上,双刃刀夹通过螺栓与双刃刀固定板连接,双刃刀通过螺栓排列固定在双刃刀固定板上,上导板和下导板通过螺栓排列固定在切割头箱体上,通过遥控无人载车的蓄电池组件的电力经电控组件向马达输入电力,马达输出轴回转运动带动曲轴并通过曲轴与曲柄连杆的连接、曲柄连杆与曲柄摇杆的连接、曲柄摇杆与切割头箱体的连接、曲柄摇杆与单刃刀夹的连接、曲柄摇杆与双刃刀夹连接、单刃刀夹与单刃刀片固定板的连接、双刃刀夹与双刃刀固定板连接、单刃刀片在单刃刀片固定板的排列固定连接、双刃刀在双刃刀固定板排列固定连接,实现马达输出轴的回转运动转化成单刃刀片和双刃刀的往复运动,完成绿篱、草地、草坪、树林的枝条和草茎剪切。
附图说明
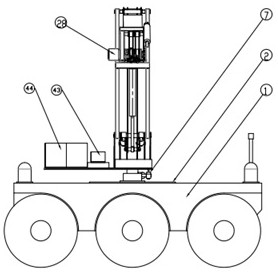
图1、图2、图3、图4、图5、图6是本发明提供的一种遥控无人车载式绿篱修剪机整体示意图。
其中:
1遥控无人载车;2固定板;3轴套;4旋转轴;5第一轴承;6第十四;7底座铰接座;8固定板铰接座;9底座;10主臂;11第一销轴;12第二销轴;13连杆;14第三销轴;15摇杆;16主臂旋转电推杆;17第四销轴;18第五销轴;19第六销轴;20外臂旋转电推杆;21第七销轴;22外臂;23切割头箱体;24切割头箱体旋转电推杆;25第八销轴;26第八销轴;27第十销轴;28马达;29曲轴;30曲柄连杆;31曲柄摇杆;32第十一销轴;33第十二销轴;34单刃刀夹;35单刃刀片固定板;36第十三销轴;37单刃刀片;38双刃刀夹;39双刃刀固定板;40双刃刀;41上导板;42下导板;43电控组件;44蓄电池组件;45第十四销轴;46第二轴承;47第三轴承;48第四轴承;49第五轴承。
具体实施方式
为了解决现有技术存在的问题,如图1、图2、图3、图4、图5、图6所示,本发明提供了一种遥控无人车载式绿篱修剪机,该遥控无人车载式绿篱修剪机包括:遥控无人载车1;固定板2;轴套3;旋转轴4;第一轴承5;底座旋转电推杆6;底座铰接座7;固定板铰接座8;底座9;主臂10;第一销轴11;第二销轴12;连杆13;第三销轴14;摇杆15;主臂旋转电推杆16;第四销轴17;第五销轴18;第六销轴19;外臂旋转电推杆20;第七销轴21;外臂22;切割头箱体23;切割头箱体旋转电推杆24;第八销轴25;第八销轴26;第十销轴27;马达28;曲轴29;曲柄连杆30;曲柄摇杆31;第十一销轴32;第十二销轴33;单刃刀夹34;单刃刀片固定板35;第十三销轴36;单刃刀片37;双刃刀夹38;双刃刀固定板39;双刃刀40;上导板41;下导板42;电控组件43;蓄电池组件44;第十四销轴45;第二轴承46;第三轴承47;第四轴承48;第五轴承49。
所述遥控无人载车1的具体类型和参数可根据具体绿篱修剪工况和要求所确定的绿篱修剪机的性能参数进行选择。
所述遥控无人载车1平台固定的绿篱修剪机实现遥控无人载车遥控和自主行驶过程中完成公园绿地和树林、道路和公路绿化带等大面积的绿篱、草地、草坪、树林的枝条和草茎的安全高效修剪。
所述遥控无人载车1的的蓄电池44组件的电力输出通过电控组件43向底座旋转电推杆6、主臂旋转电推杆16、外臂旋转电推杆20、切割头箱体旋转电推杆24、马达28输出电力,驱动底座9、主臂10、外臂22、切割头箱体23旋转和马达28回转运动。
所述固定板2由螺栓固定在遥控无人载车1平台上,轴套3通过螺栓与固定板连接,旋转轴4通过第一轴承5与轴套3连接,旋转轴4通过螺栓固定在底座9上,固定板铰接座8由螺栓固定在固定板2上,底座铰接座7由螺栓固定在底座9上,底座旋转电推杆6的活塞杆端和缸筒端分别通过第十四销轴45与固定板铰接座8和底座铰接座7连接,实现由底座旋转电推杆6驱动底座9通过旋转轴以轴套为中心在遥控无人载车1上的固定板2上旋转,完成遥控无人车载绿篱修剪机的遥控无人载车1车厢左侧和右侧的绿篱、草地、草坪、树林的枝条和草茎的修剪。
所述主臂10通过第一销轴11与底座9和摇杆15连接,主臂旋转电推杆16的缸筒端通过第四销轴17与底座9连接,主臂旋转电推杆16的活塞杆端通过第五销轴18与摇杆15连接,外臂旋转电推杆20缸筒端通过第七销轴21与主臂连接,外臂旋转电推杆20活塞杆端通过第六销轴19与连杆13和摇杆15连接,主臂10通过第二销轴12与外臂22连接,连杆13通过第三销轴14与外臂22连接,实现通过主臂旋转电推杆16活塞杆的伸缩驱动主臂10以第一销轴11为中心旋转,通过外臂旋转电推杆20活塞杆的伸缩驱动外臂22以第二销轴12为中心旋转,通过遥控无人载车1平台上的电控组件43控制主臂旋转电推杆16活塞杆和外臂旋转电推杆20活塞杆协调伸缩,驱动主臂10和外臂22实现分别或同时旋转展开和收回,完成底座9支承主臂10、主臂10支承外臂22的协同伸展和回收运动。
所述切割头箱体23通过第八销轴25与外臂22连接,切割头箱体旋转电推杆24缸筒端通过第九销轴26与外臂22连接,切割头箱体旋转电推杆24活塞杆端通过第十销轴27连接,通过切割头旋转电推杆24活塞杆的伸缩驱动切割头箱体23以第八销轴25为中心旋转,完成外臂22支承的切割头箱体23的空间旋转运动。
所述马达28通过螺栓固定在切割头箱体23上,马达28输出轴通过键与曲轴29连接,曲轴的二个以曲轴轴线为中心相距180度的曲轴轴拐通过第二轴承46与曲柄连杆30连接,曲柄连杆30通过第三轴承47和第十一销轴32与二个曲柄摇杆31连接,二个曲柄摇杆30分别通过第四轴承48和第十三销轴36连接,二个曲柄摇杆30分别通过第十一销轴32和第五轴承49与单刃刀夹34和双刃刀夹38连接,单刃刀夹34通过螺栓与单刃刀片固定板35连接,单刃刀片37通过铆钉排列固定在单刃刀片固定板35上,双刃刀夹38通过螺栓与双刃刀固定板39连接,双刃刀40通过螺栓排列固定在双刃刀固定板39上,上导板41和下导板42通过螺栓排列固定在切割头箱体23上,通过遥控无人载车1的蓄电池组件的电力经电控组件43向马达28输入电力,马达28输出轴回转运动带动曲轴29并通过曲轴29与曲柄连杆30的连接、曲柄连杆30与曲柄摇杆31的连接、曲柄摇杆31与切割头箱体23的连接、曲柄摇杆31与单刃刀夹34的连接、曲柄摇杆31与双刃刀夹38连接、单刃刀夹34与单刃刀片固定板39的连接、双刃刀夹38与双刃刀固定板39连接、单刃刀片37在单刃刀片固定板35的排列固定连接、双刃刀40在双刃刀固定板39排列固定连接,实现马达28输出轴的回转运动转化成单刃刀片37和双刃刀40的刀刃交错往复运动,完成绿篱、草地、草坪、树林的枝条和草茎剪切。
本发明中遥控无人车载式绿篱修剪机,通过遥控无人载车的蓄电池组件电力通过电控组件分别向底座旋转电推杆、主臂旋转电推杆、外臂旋转电推杆、切割头旋转电推杆、马达输出电力,由电控组件控制底座旋转电推杆、主臂旋转电推杆、外臂旋转电推杆、切割头旋转电推杆作旋转运动,由电控组件控制马达作回转运动,驱动遥控无人载车平台上固定的由底座、主臂、外臂、连杆、摇杆、切割头组成的绿篱修剪机在遥控无人载车遥控和自主行驶过程中完成公园绿地和树林、道路和公路绿化带等大面积的绿篱、草地、草坪、树林的枝条和草茎的安全高效修剪。
以上所述仅为本发明的较佳实施例,并不用以限制本发明。凡在本发明的精神和原则之内,所作的任何修改,等同替换、改进等。均应包含在本发明的保护范围之内。
- 一种遥控无人车载式绿篱修剪机
- 一种车载式绿篱修剪机回转设备