一种具有大推力的小型透镜驱动装置
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及透镜驱动的技术领域,特别涉及一种具有大推力的小型透镜驱动装置。
背景技术
在闭环透镜驱动马达中,通过PCB板上的“霍尔芯片”与透镜支撑体上嵌设的“霍尔磁石”相感应,通过马达通电作动过程中产生的磁场强弱变化,即能演算检测出镜头当前的所在位置。给马达施加既定的电流,可达到快速、精准对焦的目的。此为闭环马达所特有的位置反馈系统,区别于常规马达的功能。现有技术的闭环控制马达,是将闭环控制电路结构即PCB板设置于透镜支撑体侧面,导致马达整体部品增多、组装工艺复杂,不利于马达小型化,同时无法在透镜载体四周均设驱动磁石,即线圈与磁石有效的感应面积较小,导致无法满足大推力马达的要求。
发明内容
针对现有技术中存在的不足之处,本发明的目的是提供一种具有大推力的小型透镜驱动装置,使得马达整体的体积减小,安装工艺简单不复杂,且满足大推力的需求。为了实现根据本发明的上述目的和其他优点,提供了一种具有大推力的小型透镜驱动装置,包括:
底座、设置于所述底座上的绕线载体、用于罩住所述绕线载体的外壳及固定于所述绕线载体侧面上的驱动线圈组件及与所述驱动线圈组件相贴设置的驱动磁石组件;
所述驱动线圈组件包括一相对的第一驱动线圈件及与所述第一驱动线圈件相邻设置的第二驱动线圈件,所述第一驱动线圈件与第二驱动线圈件之间通过导电件连接;
所述绕线载体上至少设置有两个固定凸台,所述固定凸台上缠绕有第一驱动线圈件;
所述驱动磁石组件包括一相对设置的第一驱动磁石件及与所述第一驱动磁石件相邻设置的第二驱动磁石件,所述第一驱动磁石件与第一驱动线圈件相贴设置,所述第二驱动磁石件与第二驱动线圈件相贴设置。
优选的,所述绕线载体的每个侧面上分别固接有固定凸台,一相对的固定凸台上缠绕有第一驱动线圈件,另一相对的固定凸台上缠绕有第二驱动线圈件。
优选的,所述底座上嵌埋有电路连接组件,所述电路连接组件包括底座嵌埋电路连接件,所述底座嵌埋电路连接件上设置有多个引脚端。
优选的,所述底座嵌埋电路连接件上安装有驱动芯片及电容。
优选的,所述底座嵌埋电路连接件上一体式连接有第一焊接台与第二焊接台,所述第一焊接台与第二焊接台的结构相同,且所述第一焊接台包括第一水平段、与所述第一水平段一体式连接的竖直段及与所述竖直段一体式连接的第二水平段。
优选的,所述绕线载体的上端面上固接有第一弹簧,绕线载体的下端面上固接有第二弹簧,所述第一弹簧与第二弹簧分别包括内环固定件与外环固定件,所述内环固定件固定于绕线载体上。
优选的,所述第一弹簧的外环固定件固定于外壳内表面上,所述第二弹簧的外环固定件固定于底座上。
优选的,所述第二弹簧包括一相对设置的弧形固定杆、固定于所述弧形固定杆两端上的固定板、与所述固定板固定连接的弹簧链及与所述弹簧链固接的底座固定板,所述弧形固定杆通过固定板固定于绕线载体的下端面上,所述第二弹簧通过底座固定板固定于底座上。
优选的,所述弧形固定杆上开设有让位槽,且所述让位槽的一边沿沿水平方向延伸有一突出部,所述让位槽中容纳有驱动线圈的末端。
优选的,所述绕线载体的下端面上开设有一磁石槽,所述磁石槽中镶嵌有霍尔磁石。
优选的,所述底座嵌埋电路连接件包括第一弧形电路条及与所述第一弧形电路条相间隔设置的第二弧形电路,所述第一弧形电路条与第二弧形电路一端上分别一体式连接有金属引脚,所述第一弧形电路条与第二弧形电路远离引脚端的一端分别固定于驱动芯片上。
优选的,所述驱动芯片上固接第二金属引脚与第三引脚,所述第二金属引脚与第三引脚的平面端位于同一水平面上,且所述第二金属引脚与第三引脚的平面及金属引脚的平面端位于同一水平面上。
本发明与现有技术相比,其有益效果是:通过在绕线载体的四个面上均设置有驱动线圈,而且每驱动线圈上相贴设置有驱动磁石,磁石与驱动线圈均有4个,因而装置整体磁石与线圈的有效作用面积大,有效作用面积,有利于提升磁场强度,可大大增加马达的驱动力,使得在很小的电流作用下能够产生大推力,有利于降低能耗;由于磁场强度得到有效地提升,磁场分布也更加均匀,不仅提高了驱动稳定性,同时亦可以将磁场组件设计的更加小巧、马达内部结构更加紧凑,进而能够设计出更加小型化的透镜驱动马达,而且通过霍尔磁石、驱动芯片及电容组成闭环控制系统,通过驱动芯片感应相对应设置于透镜支撑体底面上的霍尔磁石移动过程中不同磁场强度,判断透镜支撑体的移动位置。驱动芯片根据反馈值得到正负误差,之后再去利用正负误差控制镜头的移动方向和速度,就可以极短时间内较为精确且快速合焦了。
附图说明
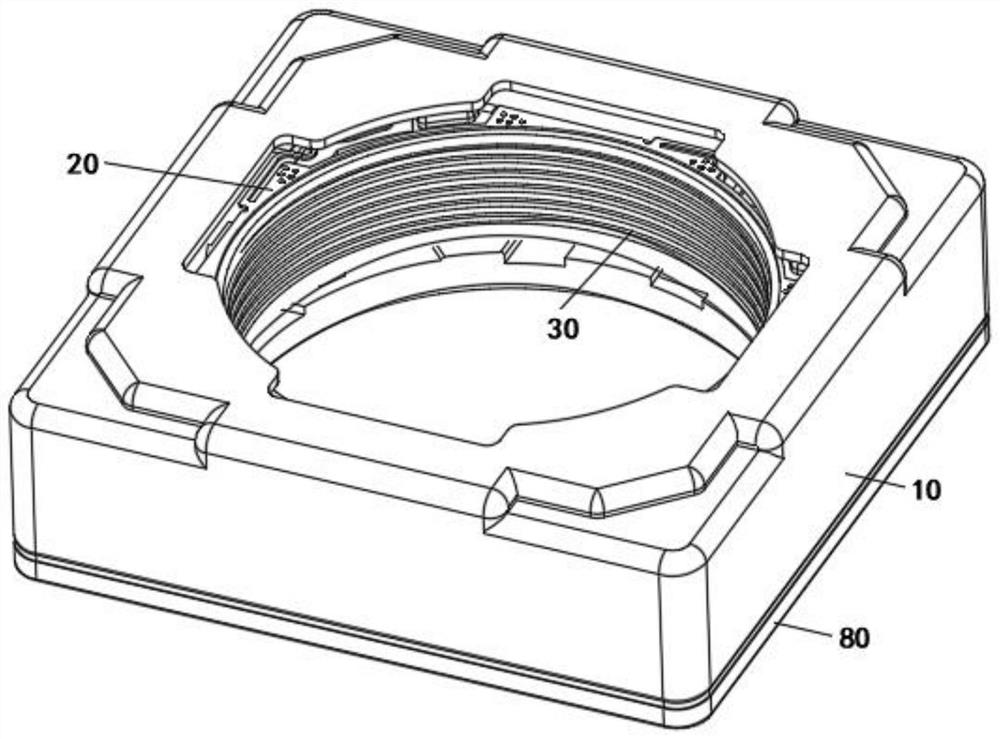
图1为根据本发明的具有大推力的小型透镜驱动装置的三维结构示意图;
图2为根据本发明的具有大推力的小型透镜驱动装置的三维爆炸结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1-2,一种具有大推力的小型透镜驱动装置,包括:底座80、设置于所述底座80上的绕线载体30、用于罩住所述绕线载体30的外壳10及固定于所述绕线载体30侧面上的驱动线圈组件40及与所述驱动线圈组件40相贴设置的驱动磁石组件50;所述驱动线圈组件40包括一相对的第一驱动线圈件41及与所述第一驱动线圈件41相邻设置的第二驱动线圈件42,所述第一驱动线圈件41与第二驱动线圈件42之间通过导电件连接;所述绕线载体30上至少设置有两个固定凸台31,所述固定凸台31上缠绕有第一驱动线圈件41;所述驱动磁石组件50包括一相对设置的第一驱动磁石件51及与所述第一驱动磁石件51相邻设置的第二驱动磁石件52,所述第一驱动磁石件51与第一驱动线圈件41相贴设置,所述第二驱动磁石件52与第二驱动线圈件42相贴设置,第一驱动磁石件51与第二驱动磁石件52分别至少包括有两条磁石,该驱动装置通过通过四面驱动磁石与四面驱动线圈相互作用,形成Z轴的驱动力,磁石与驱动线圈均有4个,因而装置整体磁石与线圈的有效作用面积大,有效作用面积,有利于提升磁场强度,可大大增加马达的驱动力,使得在很小的电流作用下能够产生大推力,有利于降低能耗;由于磁场强度得到有效地提升,磁场分布也更加均匀,不仅提高了驱动稳定性,同时亦可以将磁场组件设计的更加小巧、马达内部结构更加紧凑,进而能够设计出更加小型化的透镜驱动马达。
进一步的,所述绕线载体30的每个侧面上分别固接有固定凸台31,一相对的固定凸台31上缠绕有第一驱动线圈件41,另一相对的固定凸台31上缠绕有第二驱动线圈件42。
进一步的,所述底座80上嵌埋有电路连接组件70,所述电路连接组件70包括底座嵌埋电路连接件71,所述底座嵌埋电路连接件71上设置有多个引脚端,所述底座嵌埋电路连接件71上安装有驱动芯片73及电容74,所述绕线载体30的下端面上开设有一磁石槽,所述磁石槽中镶嵌有霍尔磁石,底座嵌埋电路组件及驱动芯片,因此可以将霍尔磁石设置于透镜支撑体的下端面,霍尔组件(霍尔磁石、驱动芯片)不容易受到干扰,驱动磁石和霍尔磁石之间相互空间间隔较大,故在结构上杜绝了驱动磁石和霍尔磁石之间可能产生的相互吸引力或排斥力等磁场相干扰状况,驱动磁石也在空间结构上杜绝了对霍尔磁石和霍尔芯片产生负面作用和影响,也就不会对传感器的稳定信号输出和动作产生障碍,有利于AF闭环控制马达的信号反馈,提升和改善马达的线性参数稳定性,所述底座嵌埋电路连接件71上一体式连接有第一焊接台711与第二焊接台712,所述第一焊接台711与第二焊接台712的结构相同,且所述第一焊接台711包括第一水平段、与所述第一水平段一体式连接的竖直段及与所述竖直段一体式连接的第二水平段,通过霍尔磁石、驱动芯片73及电容74构成闭环控制系统,通过驱动芯片73感应相对应设置于透镜支撑体底面上的霍尔磁石移动过程中不同磁场强度,判断透镜支撑体的移动位置。驱动芯片73根据反馈值得到正负误差,之后再去利用正负误差控制镜头的移动方向和速度,就可以极短时间内较为精确且快速合焦了,通过该闭环控制电路结构通过底座嵌埋电路组件得以实现,即取消了现有技术AF闭环控制马达需要在侧边设置PCB板才能实现AF闭环控制,克服了现有AF闭环马达的缺陷,结构简单,提高了透镜驱动马达的安装效率。
进一步的,所述绕线载体30的上端面上固接有第一弹簧20,绕线载体30的下端面上固接有第二弹簧60,所述第一弹簧20与第二弹簧60分别包括内环固定件与外环固定件,所述内环固定件固定于绕线载体30上,所述第二弹簧60包括一相对设置的弧形固定杆61、固定于所述弧形固定杆61两端上的固定板62、与所述固定板62固定连接的弹簧链63及与所述弹簧链63固接的底座固定板64,所述弧形固定杆61通过固定板62固定于绕线载体30的下端面上,所述第二弹簧60通过底座固定板64固定于底座80上,当向透镜支撑体上的侧向线圈附加电流,则在竖直方向光轴方向上电磁力就开始起作用,但经第一弹簧20和第二弹簧60的弹性按比例性地进行变位(即弹簧丝伸缩)后,就会作用向竖直方向光轴方向电磁力的反方向。因此,透镜的位置即向前方移动的距离是在电磁力和弹性力相平衡的点上。据此,根据附加在驱动线圈组件40上的电流量,就可决定作为动子部件(透镜支撑体)的移动量,而且当向驱动线圈组件40通入电流后,驱动线圈组件40与驱动磁石组件50之间就会产生电磁力,根据弗莱明左手法则,由于电磁力的作用驱使透镜支撑体沿镜头光轴方向作直线移动,透镜支撑体最终停留于驱动线圈组件40与驱动磁石组件50之间产生的电磁力与第一弹簧20和第二弹簧60的弹性力的合力达到相均衡状态时的位置点。通过向驱动线圈组件40通入既定的电流,可控制使绕线载体30移动至目标位置,从而达到自动调焦的目的。
进一步的,所述第一弹簧20的外环固定件固定于外壳10内表面上,所述第二弹簧60的外环固定件固定于底座80上。
进一步的,所述弧形固定杆61上开设有让位槽,且所述让位槽的一边沿沿水平方向延伸有一突出部,所述让位槽中容纳有驱动线圈的末端,通过在所述突出部电焊锡膏,通过激光焊接与驱动线圈末端,使得线圈与第二弹簧电气性导通。
进一步的,所述底座嵌埋电路连接件71包括第一弧形电路条及与所述第一弧形电路条相间隔设置的第二弧形电路,所述第一弧形电路条与第二弧形电路一端上分别一体式连接有金属引脚,所述第一弧形电路条与第二弧形电路远离引脚端的一端分别固定于驱动芯片73上,所述驱动芯片73上固接第二金属引脚与第三引脚,所述第二金属引脚与第三引脚的平面端位于同一水平面上,且所述第二金属引脚与第三引脚的平面及金属引脚的平面端位于同一水平面上。
这里说明的设备数量和处理规模是用来简化本发明的说明的,对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
尽管本发明的实施方案已公开如上,但其并不仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
- 一种具有大推力的小型透镜驱动装置
- 一种小型化的透镜驱动马达装置