盲点区域的目标检测系统、方法及介质
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及毫米波雷达技术领域,特别是涉及一种盲点区域的目标检测系统、方法及介质。
背景技术
高级驾驶辅助系统(Advanced Driving Assistance System)是利用安装在车上的各式各样传感器(毫米波雷达、激光雷达、单\双目摄像头以及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航仪地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
毫米波雷达是测量被测物体相对距离、相对速度、方位的高精度传感器,在ADAS所用的传感器设备中,毫米波雷达以其测量距离远,测量范围广,成本低及全天候工作等优势,成为传感器中必不可少的一部分。毫米波雷达在检测障碍物时,对运动目标和静止目标的识别,以及对目标追踪、环境感知等方面起到非常重要的作用。
毫米波雷达检测到的障碍物目标(以下简称目标)的检测速度V
V
其中,θ'
从式(1)中可以看出,当目标为静止状态,即V
因此,在判断目标为静止目标还是运动目标时,先根据目标的检测角度θ
V
比较目标的检测速度V
但是,在实际应用中,这种方法仍然存在一定的缺陷,检测区域存在盲点区域,当运动目标出现在盲点区域时,公式(1)中目标的运动速度在V
因此,本领域技术人员急需解决该盲点区域的目标检测问题。
发明内容
本发明提供了一种盲点区域的目标检测系统、方法及介质,通过该发明可以有效监测盲点区域目标的运动状态,可以为ADAS系统及智能驾驶系统提供较优的环境感知判断依据。
盲点区域的目标检测系统包括:第一接收模块,用于接收毫米波雷达检测到的目标信息,所述目标信息包括目标的检测角度、目标的检测速度;盲点区域判断模块,用于根据所述第一接收模块获取的目标的检测角度判断所述目标是否位于盲点区域;第二接收模块,用于获取本车的本车速度;计算模块,用于根据所述第一接收模块获取到的目标的检测速度、第二接收模块获取到的本车速度计算得到所述目标的估算角度;目标状态判断模块,用于比较检测到的目标的检测角度θ
所述盲点区域的目标检测系统中所述盲点区域判断模块判断目标是否进入盲点区域的具体方式为:判断所述目标的检测角度θ
所述盲点区域的目标检测系统中所述第二预设范围为【-5°,5°】或【85°,95°】或【-95°,-85°】或【175°,180°】或【-180°,-175°】。
所述盲点区域的目标检测系统中所述计算模块根据所述本车速度V
所述盲点区域的目标检测系统用三阶泰勒展开公式
所述盲点区域的目标检测系统中所述第一预设范围为【-3°,3°】。
盲点区域的目标检测方法,包括步骤:获取毫米波雷达检测到的所述目标的检测角度θ
所述盲点区域的目标检测方法判断目标是否进入盲点区域的具体方式为:判断所述目标的检测角度θ
所述盲点区域的目标检测方法中所述第二预设范围是【-5°,5°】或【85°,95°】或【-95°,-85°】或【-180°,-175°】或【175°,180°】。
所述盲点区域的目标检测方法根据所述本车速度V
所述盲点区域的目标检测方法中用三阶泰勒展开公式
所述盲点区域的目标检测方法中所述第一预设范围为【-3°,3°】。
一种计算机存储介质,所述计算机存储介质用于储存上述盲点区域的目标检测方法所对应的软件程序。
本发明的盲点区域的目标检测系统、方法及介质可以对盲点区域的目标的运动状态进行准确地判断,不会造成误判和漏报,从而实现更好得监测效果,为ADAS或智能驾驶等场景提供更为准确的环境感知依据,从而使其运行更为可靠。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
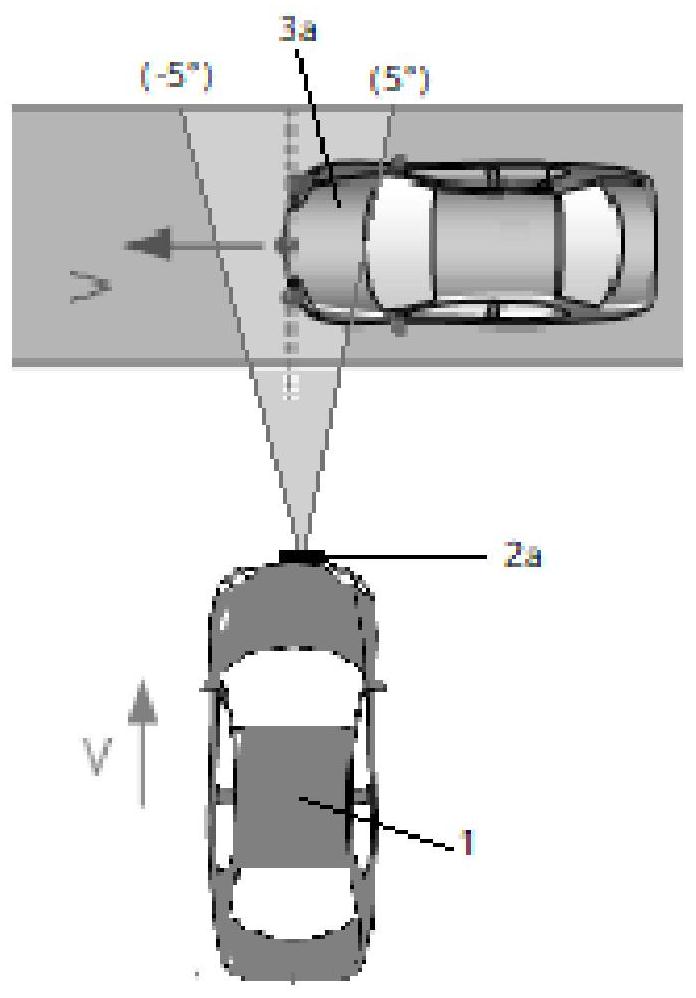
图1为盲点区域为【-5°,5°】范围的示意图。
图2为盲点区域为【85°,95°】范围的示意图。
图3为盲点区域为【-95°,-85°】范围的示意图。
图4为盲点区域为【-180°,-175°】及【175°,180°】范围的示意图。
附图标记:
1-本车;2a、2b、2c、2d-毫米波雷达;3a、3b、3c、3d-目标。
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
具体实施例一
本实施例公开了一种盲点区域的目标检测系统,包括第一接收模块、第二接收模块、盲点区域判断模块、计算模块及目标状态判断模块。其中,第一接收模块用于接收毫米波雷达检测到的目标信息,所述目标信息包括目标的检测角度(也可称为目标的多普勒角度)、目标的检测速度(也可称为目标的多普勒速度)。盲点区域判断模块用于根据所述第一接收模块获取的目标的检测角度判断所述目标是否位于盲点区域。第二接收模块用于获取本车的本车速度,这里的本车指的是安装毫米波雷达的车辆。计算模块用于根据所述第一接收模块获取到的目标的检测速度、第二接收模块获取到的本车速度计算得到所述目标的估算角度。目标状态判断模块用于比较检测到的目标的检测角度θ
在具体实施时,当盲点区域判断模块判定所述目标位于所述盲点区域内后,所述计算模块计算得到所述目标的估算角度θ
需要说明的是,本实施例给出的第一预设范围是一个较佳的范围,在其他具体实施例中,还可以根据实际要求,对该预设范围进行调整,当然,也可以通过目标的检测角度和估算角度的差值绝对值与固定阈值的对比来判断目标是否位于盲点区域,其本质上与本实施例中的方法一样,此处不再一一赘述。
具体的,在本实施例中,判断目标是否进入盲点区域的具体方式为:判断所述目标的检测角度θ
当目标处于盲点区域时,无论目标是静止还是运动,毫米波雷达的检测速度基本为零,这是毫米波雷达的特性决定,此时,再用背景技术中提到的技术方案来判定目标的运动状态时,会造成误判。另外,当目标出于盲点区域时,毫米波雷达检查到的目标的检测角度很准确,可以作为判断依据。
如图1~4所示,为本具体实施例的4中具体应用场景,其中,本车1上安装有4个雷达2a、2b、2c、2d,用于探测障碍物目标。
具体的,如图1所示,在自动刹车技术(AEB,Autonomous Emergency Braking)应用场景中,当毫米波雷达2a检测到的目标的检测角度在【-5°,5°】这个范围内时,就可以判定目标3a进入了盲点区域,从而对目标3a的运动状态进行下一步的判断。
具体的,如图2、3所示,在汽车盲点探测系统(BSD,Blind Spot Detection)应用场景中,当毫米波雷达2b检测到的目标的检测角度在如图2所示的【85°,95°】范围内,就可以判定目标3b进入了盲点区域,从而对目标3b的运动状态进行下一步的判断;或者,毫米波雷达2c检测到的目标的检测角度在如图3所示的【-95°,-85°】这个范围内时,就可以判定目标3c进入了盲点区域,从而对目标3c的运动状态进行下一步的判断。
具体的,在后方横向来车预警(RCTA)应用场景中,当毫米波雷达2d检测到的目标的检测角度在如图4所示【-180°,-175°】或【175°,185°】范围内时,就可以判定目标3d进入了盲点区域,从而对目标3d的运动状态进行下一步的判断。
需要特别注意的是,如图1~4所示的,位于盲点区域中的目标为车辆进入盲点区域的部分,而非车辆全部。并且,图1~4所示为本实施例中的目标检测系统的4个独立应用场景,在具体应用时,这四个应用场景均可以独立运行或者根据实际情况组合运行。
另外,需要说明的是,本实施例中的第二预设范围是【-5°,5°】或【85°,95°】或【-95°,-85°】或【-180°,-175°】或【175°,180°】,这仅为第二预设范围的一些优选的范围,在其他具体应用中,第二预设范围还可以根据实际需要进行调整。
具体的,在本实施例中,计算模块根据所述本车速度V
本具体实施例中的盲点区域的目标检测系统可以精确地检测盲点区域的目标的运动状态,为雷达的后续分析提供准确的数据依据,有利于ADAS系统或者智能驾驶等应用场景的可靠运行。
具体实施例二
本实施例公开了一种盲点区域的目标检测方法,包括步骤:获取毫米波雷达检测到的所述目标的检测角度θ
具体的,在本实施例中,判断目标是否进入盲点区域的具体方式为:判断所述目标的检测角度θ
具体的,在自动刹车技术(AEB,Autonomous Emergency Braking)运用场景中,当毫米波雷达检测到的目标的检测角度在【-5°,5°】这个范围内时,就可以判定目标进入了盲点区域,从而进行下一步的判断。
具体的,在汽车盲点探测系统(BSD,Blind Spot Detection)运用场景中,当毫米波雷达检测到的目标的检测角度在【85°,95°】或者【-95°,-85°】这个范围内时,就可以判定目标进入了盲点区域,从而进行下一步的判断。
具体的,在后方横向来车预警(RCTA)运用场景中,当毫米波雷达检测到的目标的检测角度在【-180°,-175°】或【175°,180°】这个范围内时,就可以判定目标进入了盲点区域,从而进行下一步的判断。
需要特别说明的是,本实施例中的第二预设范围是【-5°,5°】或【85°,95°】或【-95°,-85°】或【-180°,-175°】或【175°,180°】,这仅为第二预设范围的优选范围,在其他具体应用中,第二预设范围还可以根据实际需要进行调整。并且,在本方法可以在上述几个运用场景中独立实施,或者将几个运用场景进行组合后实施。
具体的,根据所述本车速度V
需要说明的是,本具体实施例中的方法涉及到的步骤的先后顺序并非是按照本案中的顺序固定不变的,本领域技术人员可以根据实际需求调整步骤的先后顺序。
本具体实施例中的盲点区域的目标检测方法可以精确地检测盲点区域的目标的运动状态,为雷达的后续分析提供准确的数据依据,有利于ADAS系统或者智能驾驶等应用场景的可靠运行。
具体实施例三
本实施例公开了一种计算机存储介质,所述计算机存储介质用于储存具体实施例二中的盲点区域的目标检测方法的软件程序。存储介质的具体形式可以根据实际需要进行选择和调整。
需要说明的是,在本申请文件中所述的目标可以为图中所示的车辆,在其他具体实施例中还可以为行人、非机动车等障碍物等。并且,以车辆为例,当目标为车辆时,本申请文件中提到的盲点区域的目标,指的并非车辆整体,而是车辆位于盲点区域的那部分。
另外,毫米波雷达系统在分析目标的运动状态时,会根据其监测到的目标的运动状态生成可视的点云信息,运动目标和静止目标的点云信息不同,如果一车辆部分位于盲点区域内,部分位于盲点区域外时,其通过背景技术中的方法得到位于盲点区域内的点云信息和位于盲点区域外的点云信息是不同的,这会导致在分析时对车辆(或其他障碍物)整体的割裂,无法对同一车辆进行有效准确的跟踪,这种割裂不利于ADAS及智能驾驶的运行。而通过本申请中所述的系统、方法及介质得到的车辆的点云信息更为准确,可以实现对同一车辆上所有目标的准确判断,从而得到精确的障碍物整体的运动状态,为ADAS系统或智能驾驶系统提供可靠的判断依据,保证其可以可靠运行。
须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
此外,虽然本文已经描述了说明性实施例,但是具有等效元件,修改,省略,组合(例如,跨各种实施例的方面),改编和/或改变的任何和所有实施例的范围,如本领域技术人员将理解的。基于本公开的技术。权利要求中的限制应基于权利要求中采用的语言广义地解释,并且不限于本说明书中描述的示例或者在申请的起诉期间。这些例子应被解释为非排他性的。此外,可以以任何方式修改所公开方法的步骤,包括通过重新排序步骤和/或插入或删除步骤。因此,意图是说明书和实施例仅被认为是说明性的,真正的范围和精神由所附权利要求及其等同物的全部范围表示。
- 盲点区域的目标检测系统、方法及介质
- 基于警报区域中特别是盲点上目标物体的存在在机动车辆中保持警报信号的方法以及对应的驾驶员协助系统和机动车辆