转向架动态检查卡控装置
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及轨道车辆检测领域,具体涉及一种转向架动态检查卡控装置。
背景技术
转向架位于车体和轨道之间,是轨道车辆的重要组成部件之一。转向架不仅要引导、驱动车辆沿钢轨行驶,承载车体的全部重量,还要缓冲车体与轨道间的作用力。可以说转向架的质量直接决定了车辆运行的稳定性和舒适性。
转向架落成及检修后都要进行质量检查工作,质检结果关系着转向架最终的质量,也关系着转向架能否顺利进入实际运营。转向架检查主要包括螺栓防松标记、部件表面的补漆、部件裂纹、防水密封等,现阶段主要由技术人员“眼观、手摸、锤敲”的方式来进行判别。由于转向架面积庞大、部件分布广泛,检查一个转向架往往需要耗费4人×1.5小时的工作时间。同时转向架底部空间狭小,部件均处于背光状态,这给检查的工带来了极大麻烦。检查完毕后,检修工人要使用录像机将所有的检修位置进行记录,该过程还需花费20分钟左右。这种方式虽然对转向架检查过程进行了记录,但检索、查找起来仍然十分困难。
发明内容
本发明的目的是提供一种转向架动态检查卡控装置,在无需对现场进行改造的前提下,令检查操作更简单,检测效率更高。
本发明所采用的技术方案为:
转向架动态检查卡控装置,其特征在于:
所述装置包括复合型机器人和现场操作台;
复合型机器人包括智能走行部、控制箱、6轴机器人和工业相机,复合型机器人通过智能走行部移动到转向架旁,通过6轴机器人法兰端搭载的工业相机采集转向架的图像;
现场操作台包括服务器、网络设备和显示器,现场操作台通过网络设备接收转向架的图像数据,传送到服务器,并通过显示器显示。
所述装置还包括远程终端,与现场操作台通信连接。
复合型机器人的控制箱内设置有工控机,工控机用以接收现场操作台或远程终端的任务指令,并控制智能走行部、6轴机器人和工业相机的运行。
复合型机器人搭载有定位模块,工控机根据定位信息对复合型机器人的移动进行导航。
所述装置还包括充电桩,复合型机器人根据工控机的导航移动到充电桩位置,进行充电。
复合型机器人配置有超声波避障模块,外侧安装有气动碰撞条,侧面安装有急停按钮。
工控机和远程终端对采集的图像信息进行分析和存储。
转向架动态检查卡控装置的控制方法,其特征在于:
所述方法包括以下步骤:
S1,开机上电:复合型机器人设备的开机上电及现场操作台的开机上电;
S2,开机自检:复合型机器人开机后首先进行各部分的初始化及自检,当某一部分初始化失败,则报警示意,由现场操作人员进行维修;当初始化完成后,则等待任务命令;
S3,高清图像采集:当操作人员给复合型机器人发布任务后,机器人将从待机位移动至转向架旁,开始按照指令采集转向架外观高清数据,并通过网络将数据传输至服务器;
S4,转向架标记检查:操作人员调取服务器中的转向架外观高清数据,查看转向架外观高清数据,并对转向架器件,外观等作出判断,将判断结果及故障信息录入至检测报告中;
S5,保存数据:将采集的图像数据进行编号存储,同时将检测报告归档存储。
本发明具有以下优点:
(1)降低了检修人员的劳动强度:通过复合型机器人代替人工进行转向架外观图像采集,避免了工人检测转向架顶部、底部的不便利性。
(2)提升了转向架检测的准确性:某些部位人眼无法直接观察到,只能通过工人“手摸”的方式进行查验,这种方式误差大、不直观,且这些部位的部件很难被记录到检修记录中。而该装置可通过6轴机器人的柔性特性直接采集到直观的图像数据,准确性较高。
(3)革新了转向架检测记录的方式。传统方式是在检修完成后,通过手持录像机对转向架上的部件录像记录,这种方式对于转向架的问题描述及相关单一部件检修记录查找等都比较麻烦,检索十分耗时。而通过该装置可直接对车型、转向架型号、位置、部件名称、检修结果等形成详细的检修报告,索引十分方便。
附图说明
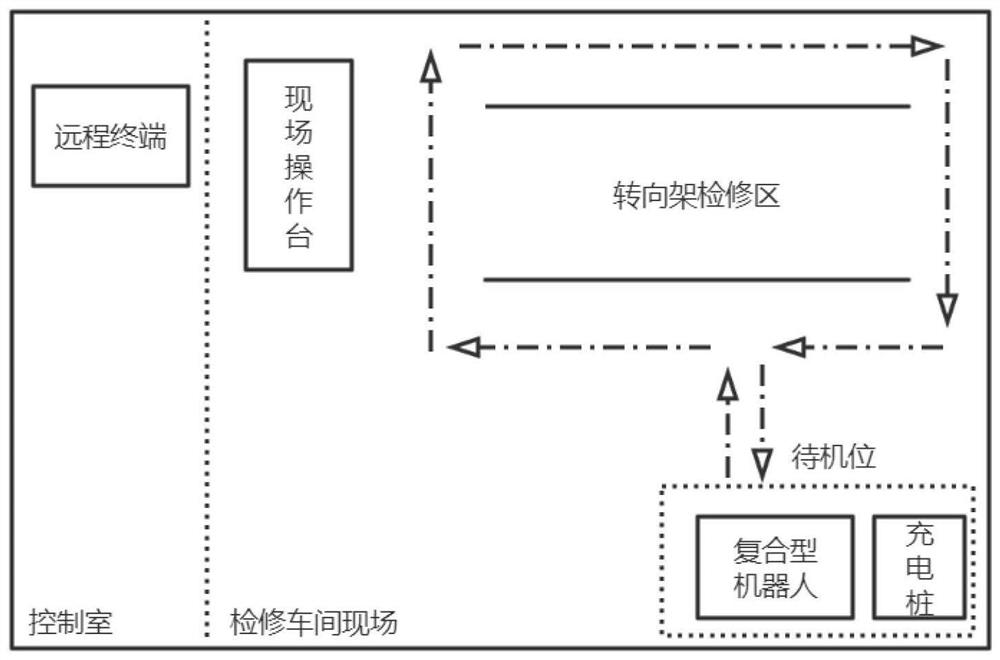
图1是本发明实施例安装布局框图;
图2是本发明实施例设备软件调控流程图。
具体实施方式
下面结合具体实施方式对本发明进行详细的说明。
本发明涉及一种转向架动态检查卡控装置,所述装置包括复合型机器人和现场操作台;复合型机器人包括智能走行部、控制箱、6轴机器人和工业相机,复合型机器人通过智能走行部移动到转向架旁,通过6轴机器人法兰端搭载的工业相机采集转向架的图像;现场操作台包括服务器、网络设备和显示器,现场操作台通过网络设备接收转向架的图像数据,传送到服务器,并通过显示器显示。所述装置还包括远程终端,与现场操作台通信连接。工控机和远程终端对采集的图像信息进行分析和存储。
复合型机器人的控制箱内设置有工控机,工控机用以接收现场操作台或远程终端的任务指令,并控制智能走行部、6轴机器人和工业相机的运行。
复合型机器人搭载有定位模块,工控机根据定位信息对复合型机器人的移动进行导航。所述装置还包括充电桩,复合型机器人根据工控机的导航移动到充电桩位置,进行充电。
复合型机器人配置有超声波避障模块,外侧安装有气动碰撞条,侧面安装有急停按钮。
转向架动态检查卡控装置的控制方法,包括以下步骤:
S1,开机上电:复合型机器人设备的开机上电及现场操作台的开机上电;
S2,开机自检:复合型机器人开机后首先进行各部分的初始化及自检,当某一部分初始化失败,则报警示意,由现场操作人员进行维修;当初始化完成后,则等待任务命令;
S3,高清图像采集:当操作人员给复合型机器人发布任务后,机器人将从待机位移动至转向架旁,开始按照指令采集转向架外观高清数据,并通过网络将数据传输至服务器;
S4,转向架标记检查:操作人员调取服务器中的转向架外观高清数据,查看转向架外观高清数据,并对转向架器件,外观等作出判断,将判断结果及故障信息录入至检测报告中;
S5,保存数据:将采集的图像数据进行编号存储,同时将检测报告归档存储。
以下结合附图对本发明进行进一步详细说明:
参见图1,本发明包括复合型机器人、充电桩、现场操作台、远程终端、配套软件;复合型机器人包括智能走行部、控制箱、6轴机器人、工业相机、触摸显示屏;充电桩附近为复合型机器人的待机位,当机器人空闲时,便在该位置待机停放;现场操作台包括柜体、服务器、网络设备、显示器;远程终端位于控制室,用以监控复合型机器人作业、检查复合型机器人采集的图像数据是否合格、检查图像处理算法检查的转向架标记是否合格等;复合型机器人的工控机与现场操作台的服务器端及远程终端通过网络进行通讯及数据传输。
参见图1、图2,当设备准备就绪后,可通过现场操作台或远程终端发布转向架检修任务。复合型机器人接收到任务指令后,可利用自身的室内定位技术导航到转向架检修区,然后安装图1中虚线所示进行移动,对转向架的外观进行高清图像采集。并且利用6轴机器人的柔韧性,可同时采集转向架上方和下方的相关部件,避免了检测时不断升降转向架的困扰,降低了转向架的磕碰风险。
参见图1、图2,操作人员通过客户端发布任务后,复合型机器人将任务进行划分,根据移动走行部、移动6轴机器人、打开相机进行采集的顺序将任务划分为多个子任务,然后按照移动最小原则进行任务排序,最后依次执行任务。
参见图1、图2,图像采集过程中通过网络设备实时的将采集的数据传送到服务器端。当复合型机器人判断任务执行完毕后,将根据导航回到充电桩位置,进行充电。
参见图1、图2,图像采集过程中,操作人员或其他人员可通过现场操作台或远程终端的显示屏实时观看采集数据及采集进度。
参见图1、图2,图像采集结束后,操作人员对每幅图像进行判断,系统将为每幅图像生成检测记录,记录转向架标记是否清晰等。
参见图1、图2,配套软件最终会生成全面的转向架检测报告,同时对图像数据及检测结果按照一定的规则进行编码存储,以供后期查验。
本发明的内容不限于实施例所列举,本领域普通技术人员通过阅读本发明说明书而对本发明技术方案采取的任何等效的变换,均为本发明的权利要求所涵盖。
- 转向架动态检查卡控装置
- 一种用于车底成像安全检查系统动态性能检测的控速滚筒旋转装置