一种物流机器人
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及机器人技术领域,尤其涉及一种物流机器人。
背景技术
物流机器人是指能够代替人工搬运货物并将货物移动到指定位置的运输设备,但是现有的物流机器人在搬运货物时无法对货物进行固定,从而导致物流机器人在运输过程中货物容易发生倾倒,进而造成货物损坏。
发明内容
本发明的目的在于提供一种物流机器人,旨在解决现有的物流机器人在搬运货物时无法对货物进行固定的问题。
为实现上述目的,本发明提供了一种物流机器人,包括移动机构、推拉机构、升降机构、导轨、双向螺杆、电机、两个滑块、两个连接臂、两个夹板和插架;所述推拉机构和所述移动机构固定连接,并位于所述移动机构上方;所述升降机构和所述推拉机构固定连接,并位于所述推拉机构上方;所述导轨和所述升降机构固定连接,并位于所述升降机构侧边;所述双向螺杆和所述导轨转动连接,并位于所述导轨内部;所述电机和所述导轨固定连接,并位于所述导轨侧边,所述电机输出端和所述双向螺杆固定连接;两个所述滑块分别和所述导轨滑动连接,且分别与所述双向螺杆螺纹连接,并分别位于所述导轨内部;两个所述连接臂分别和两个所述滑块固定连接,并分别位于两个所述滑块远离所述导轨一侧;两个所述夹板分别和两个所述连接臂固定连接,并分别位于两个所述连接臂下方;所述插架和所述导轨固定连接,并位于所述导轨下方。
其中,所述连接臂包括空心柱、螺纹杆、轴承和连接杆;所述空心柱和所述滑块固定连接,并位于所述滑块远离所述导轨一侧;所述螺纹杆和所述空心柱螺纹连接,并贯穿所述空心柱,且一端位于所述空心柱内部;所述轴承和所述螺纹杆转动连接,并位于所述螺纹杆处于所述空心柱内部一端;所述连接杆和所述轴承固定连接,且与所述空心柱滑动连接,并位于所述轴承远离所述螺纹杆一侧。
其中,所述连接臂还包括旋钮;所述旋钮和所述螺纹杆固定连接,并位于所述螺纹杆远离所述轴承一端。
其中,所述插架包括横杆、两个滑动臂和两个插板;所述横杆和所述导轨固定连接,并位于所述导轨下方;两个所述滑动臂分别和所述横杆滑动连接,并分别位于所述横杆下方;两个所述插板分别和两个所述滑动臂固定连接,并分别位于两个所述滑动臂远离所述横杆一侧。
其中,所述滑动臂包括连杆和调节螺栓;所述横杆具有多个螺孔;所述连杆和所述横杆滑动连接,并被所述横杆贯穿;所述调节螺栓分别与所述连杆和所述横杆螺纹连接,并贯穿所述连杆和所述横杆。
其中,所述推拉机构包括滑动座、气缸和移动块;所述滑动座和所述移动机构固定连接,并位于所述移动机构上方;所述气缸和所述滑动座固定连接,并位于所述滑动座侧边;所述移动块和所述滑动座滑动连接,且与所述气缸和所述升降机构固定连接,并位于所述滑动座和所述升降机构之间。
其中,所述物流机器人还包括多个防滑纹;多个所述防滑纹分别和两个所述夹板固定连接,并分别位于两个所述夹板侧边。
本发明的一种物流机器人,使用时,先通过控制所述移动机构将物流机器人移动到待搬运的货物的位置,再控制所述气缸推动所述移动块,使两个所述插板插入货物底部,而后再控制所述电机带动所述双向螺杆旋转,所述双向螺杆两端具有相反方向的外螺纹,使得两个所述滑块因所述双向螺杆的旋转而相互靠近,两个所述滑块带动两个所述夹板相互靠近,从而将货物夹紧固定;货物夹紧后控制所述升降机构带动所述导轨上移,所述导轨带动两个所述插板上移,直至货物高于所述滑动座,而后再控制所述气缸回拉所述移动块,使货物移动至所述滑动座上方,防止移动时重心发生偏移,最后再控制所述移动机构将货物运输到指定位置即可,利用两个所述夹板的夹紧力,能够防止货物在运输时发生掉落。通过转动所述螺纹杆,能够带动所述轴承和所述连接杆在所述空心柱内部进行上下滑动,所述连接杆能够带动所述夹板上下移动,从而可以根据货物高度的不同调节所述夹板的水平位置,使所述夹板能够在货物最佳的施力位置对货物进行夹紧,提高固定效果。通过将所述调节螺栓从所述连杆和所述横杆内旋出,能够使得所述连杆不再被固定,通过滑动所述连杆可以带动所述插板进行移动,可以根据货物宽度的不同对所述插板的位置进行调整,由于所述横杆上设有多个所述螺孔,在对所述插板位置调整好过后,将所述调节螺栓旋入所述连杆和相应的所述螺孔内即可将所述插板固定,从而可以实现对不同宽度的货物的搬运。通过上述方式,能够在搬运货物时对货物进行固定,防止货物发生倾倒,避免货物因掉落而损坏。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
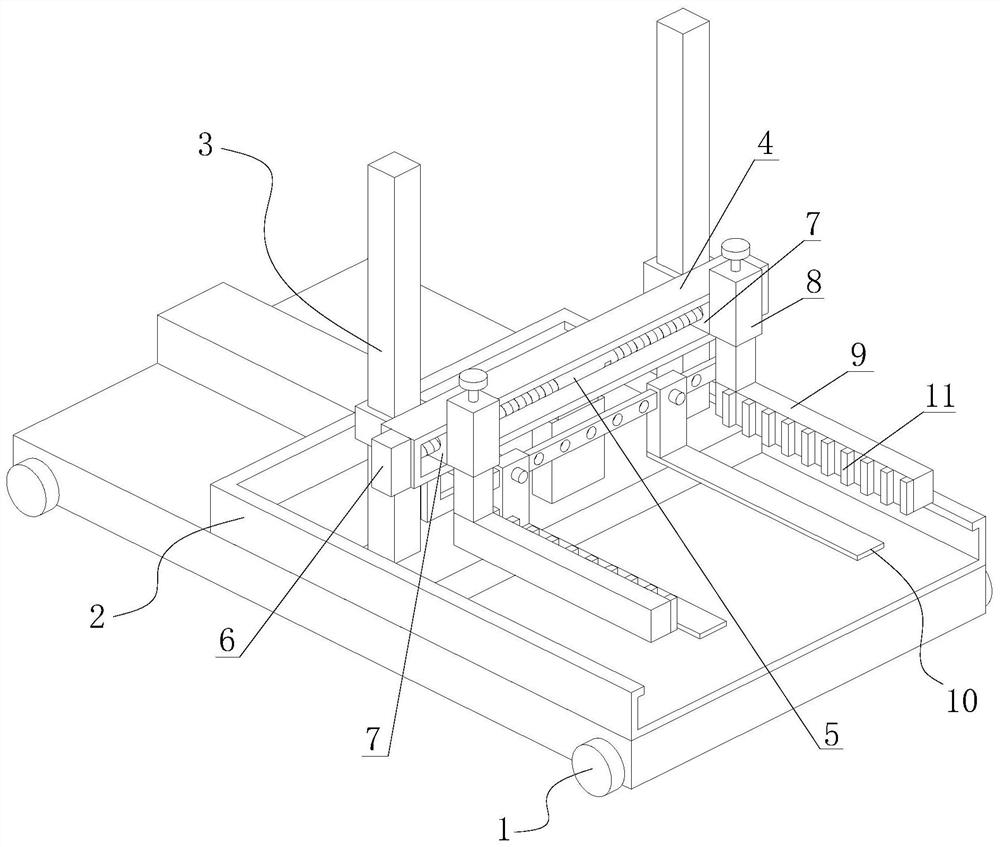
图1是本发明的一种物流机器人的结构示意图;
图2是本发明的一种物流机器人的另一结构示意图;
图3是本发明的一种物流机器人的另一结构示意图;
图4是本发明的一种物流机器人的正视剖面图。
1-移动机构、2-推拉机构、3-升降机构、4-导轨、5-双向螺杆、6-电机、7-滑块、8-连接臂、9-夹板、10-插架、11-防滑纹、21-滑动座、22-气缸、23-移动块、31-导向柱、32-电动推杆、81-空心柱、82-螺纹杆、83-轴承、84-连接杆、85-旋钮、101-横杆、102-滑动臂、103-插板、311-定位柱、312-限位块、1010-螺孔、1021-连杆、1022-调节螺栓。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
请参阅图1~图4,本发明提供一种物流机器人:包括移动机构1、推拉机构2、升降机构3、导轨4、双向螺杆5、电机6、两个滑块7、两个连接臂8、两个夹板9和插架10;所述推拉机构2和所述移动机构1固定连接,并位于所述移动机构1上方;所述升降机构3和所述推拉机构2固定连接,并位于所述推拉机构2上方;所述导轨4和所述升降机构3固定连接,并位于所述升降机构3侧边;所述双向螺杆5和所述导轨4转动连接,并位于所述导轨4内部;所述电机6和所述导轨4固定连接,并位于所述导轨4侧边,所述电机6输出端和所述双向螺杆5固定连接;两个所述滑块7分别和所述导轨4滑动连接,且分别与所述双向螺杆5螺纹连接,并分别位于所述导轨4内部;两个所述连接臂8分别和两个所述滑块7固定连接,并分别位于两个所述滑块7远离所述导轨4一侧;两个所述夹板9分别和两个所述连接臂8固定连接,并分别位于两个所述连接臂8下方;所述插架10和所述导轨4固定连接,并位于所述导轨4下方。
在本实施方式中,使用时,先通过控制所述移动机构1将物流机器人移动到待搬运的货物的位置,再控制所述推拉机构2推动所述插架10插入货物底部,而后再控制所述电机6带动所述双向螺杆5旋转,所述双向螺杆5两端具有相反方向的外螺纹,使得两个所述滑块7因所述双向螺杆5的旋转而相互靠近,两个所述滑块7带动两个所述连接臂8和两个所述夹板9相互靠近,利用两个所述夹板9将货物夹紧固定;货物夹紧后控制所述升降机构3带动所述导轨4上移,所述导轨4带动所述插架10上移,直至货物高于所述推拉机构2,而后再控制所述推拉机构2回拉所述插架10,使货物移动至所述推拉机构2上方,防止移动时重心发生偏移,最后再控制所述移动机构1将货物运输到指定位置即可,利用两个所述夹板9的夹紧力,能够在搬运货物时对货物进行固定,防止货物发生倾倒,避免货物因掉落而损坏。
进一步的,所述连接臂8包括空心柱81、螺纹杆82、轴承83和连接杆84;所述空心柱81和所述滑块7固定连接,并位于所述滑块7远离所述导轨4一侧;所述螺纹杆82和所述空心柱81螺纹连接,并贯穿所述空心柱81,且一端位于所述空心柱81内部;所述轴承83和所述螺纹杆82转动连接,并位于所述螺纹杆82处于所述空心柱81内部一端;所述连接杆84和所述轴承83固定连接,且与所述空心柱81滑动连接,并位于所述轴承83远离所述螺纹杆82一侧。
在本实施方式中,通过转动所述螺纹杆82,能够带动所述轴承83和所述连接杆84在所述空心柱81内部进行上下滑动,所述连接杆84能够带动所述夹板9上下移动,从而可以根据货物高度的不同调节所述夹板9的水平位置,使所述夹板9能够在货物最佳的施力位置对货物进行夹紧,提高固定效果。
进一步的,所述连接臂8还包括旋钮85;所述旋钮85和所述螺纹杆82固定连接,并位于所述螺纹杆82远离所述轴承83一端。
在本实施方式中,通过所述旋钮85便于工作人员转动所述螺纹杆82,从而便于对所述夹板9的位置进行调整。
进一步的,所述插架10包括横杆101、两个滑动臂102和两个插板103;所述横杆101和所述导轨4固定连接,并位于所述导轨4下方;两个所述滑动臂102分别和所述横杆101滑动连接,并分别位于所述横杆101下方;两个所述插板103分别和两个所述滑动臂102固定连接,并分别位于两个所述滑动臂102远离所述横杆101一侧。
在本实施方式中,通过滑动所述滑动臂102可以带动所述插板103进行移动,可以根据货物宽度的不同对所述插板103的位置进行调整,从而可以实现对不同宽度的货物的搬运。
进一步的,所述滑动臂102包括连杆1021和调节螺栓1022;所述横杆101具有多个螺孔1010;所述连杆1021和所述横杆101滑动连接,并被所述横杆101贯穿;所述调节螺栓1022分别与所述连杆1021和所述横杆101螺纹连接,并贯穿所述连杆1021和所述横杆101。
在本实施方式中,通过将所述调节螺栓1022从所述连杆1021和所述横杆101内旋出,能够使得所述连杆1021不再被固定,通过滑动所述连杆1021可以带动所述插板103进行移动,可以根据货物宽度的不同对所述插板103的位置进行调整,由于所述横杆101上设有多个所述螺孔1010,在对所述插板103位置调整好过后,将所述调节螺栓1022旋入所述连杆1021和相应的所述螺孔1010内即可将所述插板103固定,从而可以实现对不同宽度的货物的搬运。
进一步的,所述推拉机构2包括滑动座21、气缸22和移动块23;所述滑动座21和所述移动机构1固定连接,并位于所述移动机构1上方;所述气缸22和所述滑动座21固定连接,并位于所述滑动座21侧边;所述移动块23和所述滑动座21滑动连接,且与所述气缸22和所述升降机构3固定连接,并位于所述滑动座21和所述升降机构3之间。
在本实施方式中,通过所述气缸22能够对所述移动块23进行推拉,使得所述移动块23在所述滑动座21上方进行滑动,从而通过所述移动块23带动两个所述插板103进行移动,进而实现对货物的搬运。
进一步的,所述物流机器人还包括多个防滑纹11;多个所述防滑纹11分别和两个所述夹板9固定连接,并分别位于两个所述夹板9侧边。
在本实施方式中,通过多个所述防滑纹11能够提高所述夹板9的防滑性,从而提高对货物的夹紧效果。
进一步的,所述升降机构3包括两个导向柱31和电动推杆32;两个所述导向柱31分别和所述移动块23固定连接,且分别与所述导轨4固定连接,并分别位于所述移动块23上方;所述电动推杆32分别与所述移动块23和所述导轨4固定连接,并位于所述移动块23和所述导轨4之间。
在本实施方式中,通过所述电动推杆32能够推动所述导轨4进行升降,从而使两个所述插板103进行升降,进而可以带动货物进行升降以实现对货物的搬运;通过两个所述导向柱31能够防止所述导轨4在移动时发生偏移。
进一步的,所述导轨4包括定位柱311和限位块312;所述定位柱311和所述移动块23固定连接,并位于所述移动块23上方;所述限位块312和所述定位柱311滑动连接,且与所述导轨4固定连接,并位于所述定位柱311和所述导轨4之间。
在本实施方式中,当所述导轨4升降时会带动两个所述移动块23进行升降,利用两个所述导轨4对两个所述移动块23的限位作用,能够防止所述导轨4升降时发生偏移,从而使得货物在升降时能够保持稳定。
本发明的工作原理及使用流程:本发明安装好过后,使用时,先通过控制所述移动机构1将物流机器人移动到待搬运的货物的位置,再控制所述气缸22推动所述移动块23,使两个所述插板103插入货物底部,而后再控制所述电机6带动所述双向螺杆5旋转,所述双向螺杆5两端具有相反方向的外螺纹,使得两个所述滑块7因所述双向螺杆5的旋转而相互靠近,两个所述滑块7带动两个所述夹板9相互靠近,从而将货物夹紧固定;货物夹紧后控制所述电动推杆32推动所述导轨4上移,所述导轨4带动两个所述插板103上移,直至货物高于所述滑动座21,而后再控制所述气缸22回拉所述移动块23,使货物移动至所述滑动座21上方,防止移动时重心发生偏移,最后再控制所述移动机构1将货物运输到指定位置即可,利用两个所述夹板9的夹紧力,能够防止货物在运输时发生掉落。通过转动所述螺纹杆82,能够带动所述轴承83和所述连接杆84在所述空心柱81内部进行上下滑动,所述连接杆84能够带动所述夹板9上下移动,从而可以根据货物高度的不同调节所述夹板9的水平位置,使所述夹板9能够在货物最佳的施力位置对货物进行夹紧,提高固定效果。通过将所述调节螺栓1022从所述连杆1021和所述横杆101内旋出,能够使得所述连杆1021不再被固定,通过滑动所述连杆1021可以带动所述插板103进行移动,可以根据货物宽度的不同对所述插板103的位置进行调整,由于所述横杆101上设有多个所述螺孔1010,在对所述插板103位置调整好过后,将所述调节螺栓1022旋入所述连杆1021和相应的所述螺孔1010内即可将所述插板103固定,从而可以实现对不同宽度的货物的搬运。通过上述方式,能够在搬运货物时对货物进行固定,防止货物发生倾倒,避免货物因掉落而损坏。
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
- 一种物流机器人横偏控制方法及物流机器人
- 一种物流机器人的货仓结构及物流机器人