一种扭矩控制方法、电机控制器、整车控制器及电动汽车
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及整车控制技术领域,尤其是涉及一种扭矩控制方法、电机控制器、整车控制器及电动汽车。
背景技术
纯电动汽车通过点击驱动车轮实现车辆行驶,点击作为纯电动汽车的核心部件对整车性能影响重大。纯电动汽车电机通过单级减速器直接驱动车轮,中间无换挡机构,这也是纯电动汽车具有良好动力响应特点的原因之一,但却正是纯电动汽车的这一特点导致其与传统燃油车相比驱动系统几乎“无阻尼”,因此纯电动汽车在行车过程中更容易由于“阻尼不足”的问题引发车辆的振动,进而对车辆的驾乘体验造成很大程度的破坏。
而四轮驱动纯电动汽车也是纯电动汽车的一种,因此,四轮驱动纯电动汽车也不能避免驱动系统“欠阻尼”的问题,行车过程中同样容易由于“阻尼不足”的问题引发车辆的振动,并且由于四轮驱动车辆的前轮与后轮均输出动力,不存在从动车轮,因此由于驱动系统阻尼不足引起的振动问题更加复杂,在前驱动系统和后驱动系统均存在欠阻尼时,容易出现振动叠加效应,从而对车上人员的驾乘感受造成更严重的破坏。
发明内容
本发明的目的在于提供一种扭矩控制方法、电机控制器、整车控制器及电动汽车,从而解决现有技术中在前驱动系统和后驱动系统均存在欠阻尼时,容易出现振动叠加效应,从而对车上人员的驾乘感受造成更严重的破坏的问题。
为了达到上述目的,本发明提供一种扭矩控制方法,应用于电机控制器,所述方法包括:
根据电机的转速,确定驱动系统的当前振动信号;
根据所述当前振动信号,确定驱动系统的当前主动阻尼振动系数和主动阻尼补偿系数;
向整车控制器发送所述当前主动阻尼振动系数和所述主动阻尼补偿系数;
根据所述当前振动信号、所述主动阻尼补偿系数和接收到的所述整车控制器发送的主动阻尼控制退出系数,调整当前接收到的需求扭矩;其中,所述主动阻尼控制退出系数根据所述主动阻尼振动系数和所述主动阻尼补偿系数确定。
可选的,根据电机的当前转速,确定驱动系统的当前振动信号的步骤包括:
间隔第一预设时长,获取所述电机的转速;
根据获取的多个所述转速,对当前获取的转速进行带通滤波处理,确定所述当前振动信号。
可选的,根据获取的多个所述转速,对当前获取的转速进行带通滤波处理,确定所述当前振动信号的方法包括:
根据获取的多个所述电机的转速,对所述当前获取的转速进行二阶低通滤波处理,获取第一振动信号;
对所述第一振动信号进行一阶高通滤波处理,获取所述当前振动信号。
可选的,根据所述当前振动信号,确定驱动系统的当前主动阻尼振动系数和主动阻尼补偿系数的步骤包括:
根据所述当前振动信号,确定驱动系统的当前主动阻尼振动系数;
根据所述当前主动阻尼振动系数,确定所述主动阻尼补偿系数。
可选的,根据所述当前振动信号,确定驱动系统的当前主动阻尼振动系数的步骤包括:
根据所述当前振动信号和与所述当前振动信号相邻的前N个振动信号,确定所述当前主动阻尼振动系数。
可选的,根据所述当前主动阻尼振动系数,确定所述主动阻尼补偿系数的步骤包括:
将所述当前主动阻尼振动系数修正在第一预设振动系数限制值与第二预设振动系数限制值之间;
根据修正后的当前主动阻尼振动系数、所述第一预设振动系数限制值和所述第二预设振动系数限制值,确定所述主动阻尼补偿系数。
可选的,根据所述当前振动信号、所述主动阻尼补偿系数和接收到的所述整车控制器发送的主动阻尼控制退出系数,调整当前接收到的需求扭矩的步骤包括:
根据所述当前振动信号,确定第一补偿扭矩;
对所述第一补偿扭矩进行修正,获取第二补偿扭矩;
根据所述第二补偿扭矩,和,与所述第二补偿扭矩相邻的前M个修正后的补偿扭矩,确定当前补偿扭矩;
根据所述当前补偿扭矩,调整当前接收到的需求扭矩。
本发明实施例还提供一种扭矩控制方法,应用于整车控制器,所述方法包括:
接收前电机控制器发送的第一主动阻尼振动系数和第一主动阻尼补偿系数,以及后电机控制器发送的第二主动阻尼振动系数和第二主动阻尼补偿系数;
根据所述第一主动阻尼振动系数、所述第二主动阻尼振动系数所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数,确定主动阻尼退出系数;
将所述主动阻尼退出系数发送至电机控制器。
可选的,根据所述第一主动阻尼振动系数、所述第二主动阻尼振动系数所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数,确定主动阻尼退出系数的步骤包括:
在所述第一主动阻尼振动系数和所述第二主动阻尼振动系数均为第一预设值时,计算所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数的乘积;
若所述乘积在预设时长内大于第二预设值,则根据所述乘积确定所述主动阻尼退出系数。
可选的,根据所述乘积确定所述主动阻尼退出系数的步骤包括:
对所述乘积进行修正,使修正后的乘积位于第三预设值与第四预设值之间;
根据所述修正后的乘积、所述第三预设值和所述第四预设值,确定所述主动阻尼退出系数。
可选的,接收前电机控制器发送的第一主动阻尼振动系数和第一主动阻尼补偿系数,以及后电机控制器发送的第二主动阻尼振动系数和第二主动阻尼补偿系数的步骤之前,所述方法还包括:
获取用户需求扭矩;
将所述用户需求扭矩分配为前需求扭矩和后需求扭矩;
将所述前需求扭矩发送至前电机控制器并将所述后需求扭矩发送至后电机控制器。
本发明实施例还提供一种电机控制器,包括:
第一确定模块,用于根据电机的转速,确定驱动系统的当前振动信号;
第二确定模块,用于根据所述当前振动信号,确定驱动系统的主动阻尼振动系数和主动阻尼补偿系数;
发送模块,用于向整车控制器发送所述主动阻尼振动系数和所述主动阻尼补偿系数;
调整模块,用于根据所述当前振动信号、所述主动阻尼补偿系数和接收到的所述整车控制器发送的主动阻尼控制退出系数,调整当前接收到的需求扭矩。
可选的,所述第一确定模块包括:
第一获取子模块,用于间隔第一预设时长,获取所述电机的转速;
第一确定子模块,用于根据获取的多个所述转速,对当前获取的转速进行带通滤波处理,确定所述当前振动信号。
可选的,所述第一确定子模块包括:
第一获取单元,用于根据获取的多个所述电机的转速,对所述当前获取的转速进行二阶低通滤波处理,获取第一振动信号;
第二获取单元,用于对所述第一振动信号进行一阶高通滤波处理,获取所述当前振动信号。
可选的,所述第二确定模块包括:
第二确定子模块,用于根据所述当前振动信号,确定驱动系统的当前主动阻尼振动系数;
第三确定子模块,用于根据所述当前主动阻尼振动系数,确定所述主动阻尼补偿系数。
可选的,所述第二确定子模块具体用于根据所述当前振动信号和与所述当前振动信号相邻的前N个振动信号,确定所述当前主动阻尼振动系数。
可选的,所述第三确定子模块包括:
修正单元,用于将所述当前主动阻尼振动系数修正在第一预设振动系数限制值与第二预设振动系数限制值之间;
确定单元,用于根据修正后的当前主动阻尼振动系数、所述第一预设振动系数限制值和所述第二预设振动系数限制值,确定所述主动阻尼补偿系数。
可选的,所述调整模块包括:
第四确定子模块,用于根据所述当前振动信号,确定第一补偿扭矩;
第二获取子模块,用于对所述第一补偿扭矩进行修正,获取第二补偿扭矩;
第五确定子模块,用于根据所述第二补偿扭矩,和,与所述第二补偿扭矩相邻的前M个修正后的补偿扭矩,确定当前补偿扭矩;
调整子模块,用于根据所述当前补偿扭矩,调整当前接收到的需求扭矩。
本发明实施例还提供一种整车控制器,包括:
接收模块,用于接收前电机控制器发送的第一主动阻尼振动系数和第一主动阻尼补偿系数,以及后电机控制器发送的第二主动阻尼振动系数和第二主动阻尼补偿系数;
确定模块,用于根据所述第一主动阻尼振动系数、所述第二主动阻尼振动系数所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数,确定主动阻尼退出系数;
第一发送模块,用于将所述主动阻尼退出系数发送至电机控制器。
可选的,所述确定模块包括:
计算子模块,用于在所述第一主动阻尼振动系数和所述第二主动阻尼振动系数均为第一预设值时,计算所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数的乘积;
确定子模块,用于若所述乘积在预设时长内大于第二预设值,则根据所述乘积确定所述主动阻尼退出系数。
可选的,所述确定子模块包括:
修正单元,用于对所述乘积进行修正,使修正后的乘积位于第三预设值与第四预设值之间;
确定单元,用于根据所述修正后的乘积、所述第三预设值和所述第四预设值,确定所述主动阻尼退出系数。
可选的,所述整车控制器还包括:
获取模块,用于获取用户需求扭矩;
分配模块,用于将所述用户需求扭矩分配为前需求扭矩和后需求扭矩;
第二发送模块,用于将所述前需求扭矩发送至前电机控制器并将所述后需求扭矩发送至后电机控制器。
本发明实施例还提供一种电动汽车,包括电机控制器和整车控制器,所述电机控制器为如上所述的电机控制器,所述整车控制器为如上所述的整车控制器。
本发明的上述技术方案至少具有如下有益效果:
本发明实施例的扭矩控制方法,首先根据电机的转速,确定驱动系统的当前振动信号,然后根据所述当前振动信号,确定驱动系统的主动阻尼振动系数和主动阻尼补偿系数,通过计算出的所述主动阻尼振动系数实现对电机的振动程度予以量化;通过计算出的主动阻尼补偿系数,控制主动阻尼控制的进入与退出,从而保证车辆的驾乘感受;最终根据所述当前振动信号、所述主动阻尼补偿系数和主动阻尼控制退出系数,调整当前接收到的需求扭矩,最终实现了车辆的主动阻尼控制,从而消除了驱动系统国内工作过程中由于欠阻尼所引起的振动问题。
附图说明
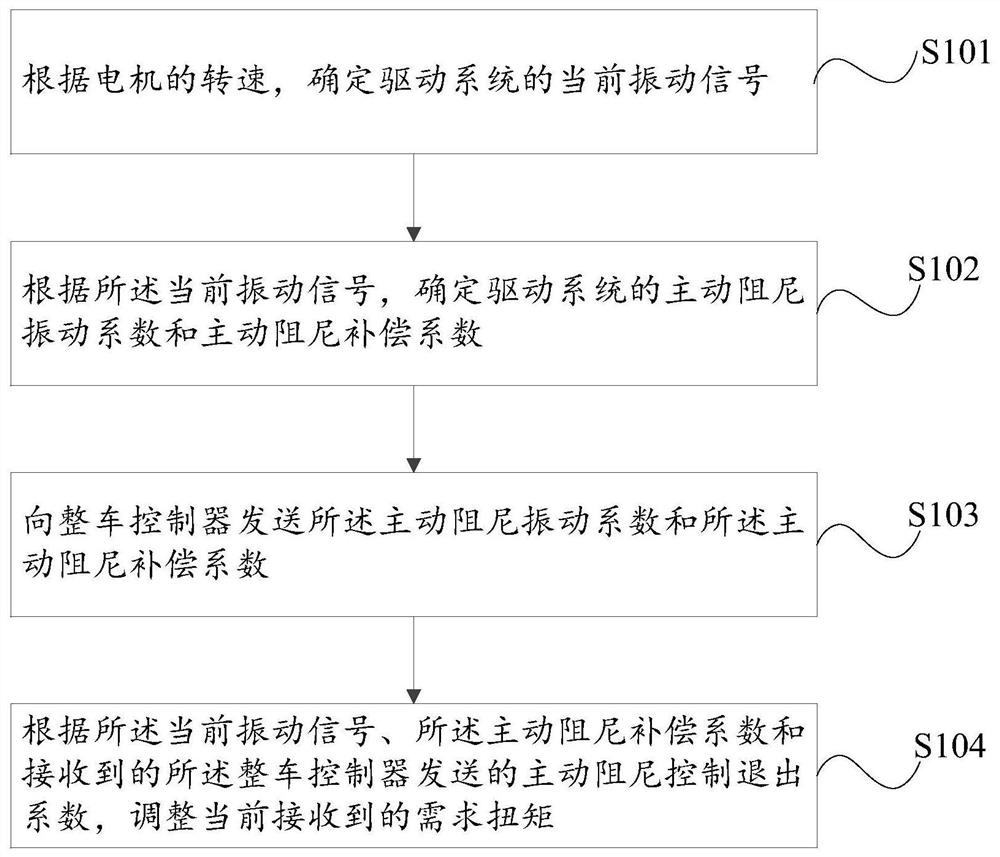
图1为本发明实施例的扭矩控制方法的第一基本步骤示意图;
图2为本发明实施例的扭矩控制方法的第二基本步骤示意图;
图3为本发明实施例的电机控制器的基本结构示意图;
图4为本发明实施例的整车控制器的基本结构示意图。
具体实施方式
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
本发明针对现有技术中的电动汽车由于阻尼不足引发车辆振动导致用户驾乘体验感受不好的问题,提供了一种扭矩控制方法、电机控制器、整车控制器及电动汽车,实现了抑制车辆系统在共振频率附近的响应峰值,提高了用户驾乘体验感受。
如图1所示,为本发明实施例的扭矩控制方法的第一基本步骤示意图;其中,所述扭矩控制方法应用于电机控制器,包括:
步骤S101,根据电机的转速,确定驱动系统的当前振动信号;
本步骤通过对所述转速进行处理,能够将电机转速中的特定评断的拨动信号筛选出来,为将电机的振动程度量化做准备。
步骤S102,根据所述当前振动信号,确定驱动系统的主动阻尼振动系数和主动阻尼补偿系数;
本步骤中,主动阻尼振动系数实际上是表征电机转速信号的波动程度,主动阻尼振动系数的数值越大,表示振动越剧烈,通过确定主动阻尼振动系数实现了主动阻尼控制中振动系数的量化;主动阻尼补偿系数表征当前是否存在主动阻尼控制需求。
步骤S103,向整车控制器发送所述主动阻尼振动系数和所述主动阻尼补偿系数;
由于本发明实施例中,在调整当前接收到的需求扭矩时,需要用到整车控制器计算的主动阻尼控制退出系数,而整车控制器是根据主动阻尼补偿系数和主动阻尼振动系数计算主动阻尼控制退出系数,因此,电机控制器需要将主动阻尼振动系数和主动阻尼补偿系数发送至整车控制器。
步骤S104,根据所述当前振动信号、所述主动阻尼补偿系数和接收到的所述整车控制器发送的主动阻尼控制退出系数,调整当前接收到的需求扭矩;其中,所述主动阻尼控制退出系数根据所述主动阻尼振动系数和所述主动阻尼补偿系数确定。
本发明实施例的扭矩控制方法,通过对电机的转速进行处理确定振动信号,并对电机的振动程度予以量化,得到主动阻尼振动系数,根据主动阻尼振动系数得到主动阻尼补偿系数,最终,根据当前的振动信号、主动阻尼补偿系数和主动阻尼退出系数,调整当前接收到的需求扭矩,实现对电机的扭矩进行调整,从而消除驱动系统工作过程层中由于欠阻尼所引起的振动问题。
可选的,步骤S101,根据电机的当前转速,确定驱动系统的当前振动信号,包括:
首先,间隔第一预设时长,获取所述电机的转速;其次,根据获取的多个所述转速,对当前获取的转速进行带通滤波处理,确定所述当前振动信号。
本步骤通过对当前获取的转速进行带通滤波处理,实现了对预设频率范围内的拨动信号的筛选,其中,筛选出来的信号用于后续的主动阻尼控制。
具体的,根据获取的多个所述转速,对当前获取的转速进行带通滤波处理,确定所述当前振动信号的方法包括:
第一,根据获取的多个所述电机的转速,对所述当前获取的转速进行二阶低通滤波处理,获取第一振动信号;
本步骤中所使用的二阶高通滤波器可以设计为:
F
其中,F
低通滤波中间函数的具体公式为:
f
第二,对所述第一振动信号进行一阶高通滤波处理,获取所述当前振动信号。
本步骤中所使用的一阶高通滤波器可以设计为:
F
其中,F
高通滤波中间函数的具体公式为:
f
本发明实施例中通过上述带通滤波处理之后,能够将电机转速中的预设频率范围内的波动信号筛选出,其中,预设频率优选5Hz至30Hz。
可选的,步骤S102,根据所述当前振动信号,确定驱动系统的主动阻尼振动系数和主动阻尼补偿系数,包括:
首先,根据所述当前振动信号,确定驱动系统的当前主动阻尼振动系数;
优选地,本步骤根据所述当前振动信号和与所述当前振动信号相邻的前N个振动信号,确定所述当前主动阻尼振动系数。本步骤的具体过程为:
根据公式
其次,根据所述当前主动阻尼振动系数,确定所述主动阻尼补偿系数。
具体的,根据所述当前主动阻尼振动系数,确定所述主动阻尼补偿系数的步骤包括:
将所述当前主动阻尼振动系数修正在第一预设振动系数限制值与第二预设振动系数限制值之间;
具体方法为:
其中,V
根据修正后的当前主动阻尼振动系数、所述第一预设振动系数限制值和所述第二预设振动系数限制值,确定所述主动阻尼补偿系数。
具体为:根据公式
其中,K
本发明实施例中,当主动阻尼振动系数较小时,不存在主动阻尼控制需求,因此这种状态下主动阻尼补偿系数为0,随着电机转速振动程度的加剧(对应主动阻尼振动系数增大),主动阻尼补偿系数会从0增大到1,本发明实施例正是利用这种逐步介入的方式控制主动阻尼控制的进入与退出,从而保证车辆的驾乘感受。
可选的,步骤S104根据所述当前振动信号、所述主动阻尼补偿系数和接收到的所述整车控制器发送的主动阻尼控制退出系数,调整当前接收到的需求扭矩,包括:
第一,根据所述当前振动信号,确定第一补偿扭矩;
具体的,本步骤具体为对所述当前振动信号的相反数进行比例积分微分调节,获得所述第一补偿扭矩,其中,比例积分微分调节的公式为:
其中,T
第二,对所述第一补偿扭矩进行修正,获取第二补偿扭矩;
具体的,本步骤的修正过称为:
对第一补偿扭矩进行限制,将其限制在第一预设补偿扭矩和第二预设补偿扭矩之间。具体为:
其中,T
第三,根据所述第二补偿扭矩,和,与所述第二补偿扭矩相邻的前M个修正后的补偿扭矩,确定当前补偿扭矩;
具体为,根据公式:
T
计算所述当前补偿系数;其中,T
由上式可以看出,在主动阻尼补偿扭矩计算的过程中,通过引入补偿系数与退出系数从而实现了补偿扭矩的自适应调节,同时该当前补偿扭矩与前两个控制周期的T
第四,根据所述当前补偿扭矩,调整当前接收到的需求扭矩。
本步骤中,调整后的需求扭矩为当前接收到的需求扭矩与当前补偿扭矩之和。
本发明实施例的扭矩控制方法,通过带通滤波器将电机的转速异常波动过滤出,利用经带通滤波后的电机转速信号对电机的振动强度予以量化,得到主动阻尼振动系数,之后,一方面,利用主动阻尼振动系数计算出主动阻尼补偿系数,另一方面,对以滤波后的电机转速波动信号(振动信号)的相反数作为输入,计算补偿扭矩,对电机的扭矩命令进行补偿,通过对车辆的特定频段扰动予以抑制从而消除驱动系统工作过程中由于欠阻尼所引起的振动问题。
本发明实施例还提供扭矩控制方法,应用于整车控制器,所述方法包括:
步骤S201,接收前电机控制器发送的第一主动阻尼振动系数和第一主动阻尼补偿系数,以及后电机控制器发送的第二主动阻尼振动系数和第二主动阻尼补偿系数;
步骤S202,根据所述第一主动阻尼振动系数、所述第二主动阻尼振动系数所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数,确定主动阻尼退出系数;
步骤S203,将所述主动阻尼退出系数发送至电机控制器。
本发明实施例的扭矩控制方法应用于四驱电动汽车的整车控制器,所述整车控制器根据接收到的第一主动阻尼振动系数、第一主动阻尼补偿系数、第二主动阻尼振动系数和第二主动阻尼补偿系数,计算出主动阻尼退出系数,并将所述主动阻尼退出系数发送至前电机控制器和后电机控制器,使所述前电机控制器和所述后电机控制器根据所述主动阻尼退出系数确定补偿扭矩,从而实现对当前需求扭矩的调整,实现通过联合补偿的控制方法达到增大系统阻尼、削弱或消除由于车辆“欠阻尼”而引起的共振问题。
可选的,步骤S201,根据所述第一主动阻尼振动系数、所述第二主动阻尼振动系数所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数,确定主动阻尼退出系数,包括:
首先,在所述第一主动阻尼振动系数和所述第二主动阻尼振动系数均为第一预设值时,计算所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数的乘积;本步骤中,所述第一预设值优选为1。其中,当所述第一主动阻尼振动系数和所述第二主动阻尼振动系数均为1时,则表明前电机和后电机全面进入到了主动阻尼控制状态,因此,在这种状态下继续判断系统是否出现了叠加振动是合理的。
其次,若所述乘积在预设时长内大于第二预设值,则根据所述乘积确定所述主动阻尼退出系数。
本步骤中,当前电机转速信号和后电机转速信号均发生波动,并且波动达到一定程度时车辆可能发生主动阻尼控制过程中的振动叠加问题,其中判断在预设时长内乘积是否大于第二预设值,是为了留出足够的时间,用于主动阻尼控制,若经过预设时长的主动阻尼控制后,前电机的主动阻尼振动系数和后电机的主动阻尼振动系数的乘积依然大于所述第二预设值,此时将考虑主动阻尼控制失效,车辆出现了振动叠加,这种条件下则需要进行主动阻尼控制退出系数的计算,通过主动阻尼退出系数来调节主动阻尼控制。
可选的,根据所述乘积确定所述主动阻尼退出系数的步骤包括:
第一,对所述乘积进行修正,使修正后的乘积位于第三预设值与第四预设值之间;
具体的,修正过程为:
其中,V
第二,根据所述修正后的乘积、所述第三预设值和所述第四预设值,确定所述主动阻尼退出系数。
具体的,根据公式
其中,K
结合对所述乘积进行修正的过程,可以看出,所述第一主动阻尼退出系数和所述第二主动阻尼退出系数在0至1之间变化,其中,所述乘积越大,表示振动越距离,则退出系数越小;本发明实施例正是利用主动阻尼控制的这一特性来保证发生叠加振动时能够使主动阻尼控制逐渐退出,以此来保证驾驶员的驾乘感受。
进一步的,步骤S201,根据所述第一主动阻尼振动系数、所述第二主动阻尼振动系数所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数,确定主动阻尼退出系数,包括:
获取用户需求扭矩;
将所述用户需求扭矩分配为前需求扭矩和后需求扭矩;
将所述前需求扭矩发送至前电机控制器并将所述后需求扭矩发送至后电机控制器。
如图3所示,本发明实施例提供了一种电机控制器,包括:
第一确定模块301,用于根据电机的转速,确定驱动系统的当前振动信号;
第二确定模块302,用于根据所述当前振动信号,确定驱动系统的当前主动阻尼振动系数和主动阻尼补偿系数;
发送模块303,用于向整车控制器发送所述当前主动阻尼振动系数和所述主动阻尼补偿系数;
调整模块304,用于根据所述当前振动信号、所述主动阻尼补偿系数和接收到的所述整车控制器发送的主动阻尼控制退出系数,调整当前接收到的需求扭矩。
本发明实施例的电机控制器中,所述第一确定模块301包括:
第一获取子模块,用于间隔第一预设时长,获取所述电机的转速;
第一确定子模块,用于根据获取的多个所述转速,对当前获取的转速进行带通滤波处理,确定所述当前振动信号。
本发明实施例的电机控制器中,所述第一确定子模块包括:
第一获取单元,用于根据获取的多个所述电机的转速,对所述当前获取的转速进行二阶低通滤波处理,获取第一振动信号;
第二获取单元,用于对所述第一振动信号进行一阶高通滤波处理,获取所述当前振动信号。
本发明实施例的电机控制器中,所述第二确定模块302包括:
第二确定子模块,用于根据所述当前振动信号,确定驱动系统的当前主动阻尼振动系数;
第三确定子模块,用于根据所述当前主动阻尼振动系数,确定所述主动阻尼补偿系数。
本发明实施例的电机控制器中,所述第二确定子模块具体用于根据所述当前振动信号和与所述当前振动信号相邻的前N个振动信号,确定所述当前主动阻尼振动系数。
可选的,所述第三确定子模块包括:
修正单元,用于将所述当前主动阻尼振动系数修正在第一预设振动系数限制值与第二预设振动系数限制值之间;
确定单元,用于根据修正后的当前主动阻尼振动系数、所述第一预设振动系数限制值和所述第二预设振动系数限制值,确定所述主动阻尼补偿系数。
本发明实施例的电机控制器中,所述调整模块304包括:
第四确定子模块,用于根据所述当前振动信号,确定第一补偿扭矩;
第二获取子模块,用于对所述第一补偿扭矩进行修正,获取第二补偿扭矩;
第五确定子模块,用于根据所述第二补偿扭矩,和,与所述第二补偿扭矩相邻的前M个修正后的补偿扭矩,确定当前补偿扭矩;
调整子模块,用于根据所述当前补偿扭矩,调整当前接收到的需求扭矩。
如图4所示,本发明实施例还提供一种整车控制器,包括:
接收模块401,用于接收前电机控制器发送的第一主动阻尼振动系数和第一主动阻尼补偿系数,以及后电机控制器发送的第二主动阻尼振动系数和第二主动阻尼补偿系数;
确定模块402,用于根据所述第一主动阻尼振动系数、所述第二主动阻尼振动系数所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数,确定主动阻尼退出系数;
第一发送模块403,用于将所述主动阻尼退出系数发送至电机控制器。
本发明实施例的整车控制器中,所述确定模块402包括:
计算子模块,用于在所述第一主动阻尼振动系数和所述第二主动阻尼振动系数均为第一预设值时,计算所述第一主动阻尼补偿系数和所述第二主动阻尼补偿系数的乘积;
确定子模块,用于若所述乘积在预设时长内大于第二预设值,则根据所述乘积确定所述主动阻尼退出系数。
本发明实施例的整车控制器中,所述确定子模块包括:
修正单元,用于对所述乘积进行修正,使修正后的乘积位于第三预设值与第四预设值之间;
确定单元,用于根据所述修正后的乘积、所述第三预设值和所述第四预设值,确定所述主动阻尼退出系数。
本发明实施例的整车控制器还包括:
获取模块,用于获取用户需求扭矩;
分配模块,用于将所述用户需求扭矩分配为前需求扭矩和后需求扭矩;
第二发送模块,用于将所述前需求扭矩发送至前电机控制器并将所述后需求扭矩发送至后电机控制器。
本发明实施例还提供一种电动汽车,包括电机控制器和整车控制器,所述电机控制器为如上所述的电机控制器,所述整车控制器为如上所述的整车控制器。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种扭矩控制方法、电机控制器、整车控制器及电动汽车
- 电动汽车输出扭矩的控制方法及整车控制器