一种自动穿磁机
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及穿磁机技术领域,具体为一种自动穿磁机。
背景技术
门封作为冰箱维持密封保温性能的主要组件之一,其主要由软质塑胶套和磁条组成,传统生产方式是先通过挤出工艺生产塑胶套,按照固定尺寸切割,再利用人工穿磁条或半自动设备穿磁条,使磁条穿入密封条中,最后经过焊接成为门封产品。
现有的自动穿磁机在工作过程中,会需要使穿磁夹料在装置进行往复输送,但物料在穿磁过程中并不稳定,牵引效果不足,容易造成穿磁胶条和磁条报废,从而增加物料加工的使用成本;原自动穿磁设备不具备自动双层摆料、自动换板等功能,往往需要人工手动摆料,人工换板的工作,增加员工的劳动强度,降低设备的自动化功效;穿磁机在抓夹往复运行期间,穿磁机的运作行程较长,增加了胶条的等待时间,进而影响穿磁效率,增加多余的工作流程;穿磁机的夹抓手在反复运作时,设备的噪音较大,并且穿磁机整体设计结构存有较大的危险性,降低操作人员工作的安全性。
发明内容
本发明的目的在于提供一种自动穿磁机,以解决上述背景技术中提出的相关问题。
为实现上述目的,本发明提供如下技术方案:包括第三架体和位于第三架体一端的第一架体与第二架体,所述第一架体的顶部安装有翻转线体,所述第三架体的顶部设有换板线体,所述第二架体顶部的一端分别设有两轴机械手机构和穿磁线体人机界面,所述第二架体顶部的中间位置处设有穿磁线体,所述第二架体顶部靠近穿磁线体的一端设有挡磁线体,所述挡磁线体顶部的一侧分别设有相互配合的挡磁条气缸和挡磁条定位伺服电机。
优选的,所述两轴机械手机构包括抓手迷你夹、抓取治具、两轴机械手马达、上下轴传动臂和导轨座,所述导轨座位于两轴机械手机构正面一端的顶部,所述导轨座内侧的中间位置处设有相互配合的移动座,所述移动座的顶部分别设有两轴机械手马达和上下轴传动臂,所述上下轴传动臂的底部设有抓取治具,所述抓取治具的底部均匀排设有抓手迷你夹。
优选的,所述换板线体包括光电感应器、输送带、传动机构和输送辊,所述输送辊位于换板线体的两侧,两组所述输送辊的外侧设有输送带,所述换板线体正面一端一侧得顶部设有与一组输送辊相互配合的传动机构,所述换板线体顶部的正面一端均匀排设有光电感应器。
优选的,所述穿磁线体包括穿磁线体马达、PVC草带、皮带线辊和轴承座,所述皮带线辊位于穿磁线体的两侧,两组所述皮带线辊的外侧设有相互配合的PVC草带,两组所述皮带线辊的正面一端设有轴承座,所述穿磁线体一侧的背面一端设有穿磁线体马达,且穿磁线体马达与一组皮带线辊相互连接。
优选的,所述导轨座位居第三架体和第二架体的上方,所述两轴机械手机构顶部的背面一端设有活动台,且活动台与穿磁线体人机界面相互连接。
优选的,所述移动座底部的两侧设有滑动块,所述导轨座顶部的两侧设有与滑动块相互适配的滑轨。
优选的,所述换板线体顶部的背面一端均匀排设有定位夹具,且定位夹具与光电感应器相互配合,所述传动机构的外侧设有保护壳,且保护壳与第三架体相互连接。
优选的,所述第二架体顶部靠近皮带线辊的两侧设有连接架,且连接架与PVC草带相互配合,所述第一架体、第二架体和第三架体的底部皆安设有固定盘,且固定盘的外侧设有防滑纹。
与现有技术相比,本发明提供了一种自动穿磁机,具备以下有益效果:
1、本发明通过两轴机械手机构与换板线体的结构控制,提供装置自动摆料、自动换板两大性能,促使在装置穿磁的胶条和磁条的牵引及定位效果更好,精确性更高,大大的减少了人工手动操作流程,提高装置自动化工作效率,并且该设备采用全伺服控制,进一步加强装置运作的稳定性,提高胶条和磁条的出品质量。
2、本发明利用翻转线体配合产品自身在运动时的形态变化,进行挤压和导向实现产品的自身翻转,通过换板线体和穿磁线体的定位模式或速度模式的不同启动,可提高两轴机械手机构摆料与夹料的平稳性,并且在抓取治具和多组抓手迷你夹的相互配合下,有效的增强物料的夹持力,这样即便在往复夹取工作下,也能防止物料位置偏移或掉落,同时减低设备运作产生的噪音。
3、本发明通过设备中的两轴机械手机构、翻转线体、换板线体、穿磁线体和挡磁线体的相互配合囊括成套控制系统,让胶条自动进行穿磁及穿磁后的自动双层摆料工作,并通过换板线体上方的光电感应器的信号及上下动作步骤的信号输出,使系统之间灵活的运用嵌入式的控制进行各系统之间的协调配合,实现了精准穿磁、精准摆料及精准换板的功效,大大的确保装置整体运作的安定性和生产效率。
附图说明
图1为本发明的自动穿磁总装第一立体图;
图2为本发明的自动穿磁总装第二立体图;
图3为本发明的两轴机械手机构立体图;
图4为本发明的换板线体立体图;
图5为本发明的穿磁线体立体图;
图6为本发明的上下轴传动臂立体图;
图7为本发明的抓手迷你夹立体图;
图8为本发明的两轴机械手马达立体图;
图9为本发明传动机构立体图;
图10为本发明的穿磁线体马达立体图;
图11为本发明的挡磁条定位伺服电机立体图。
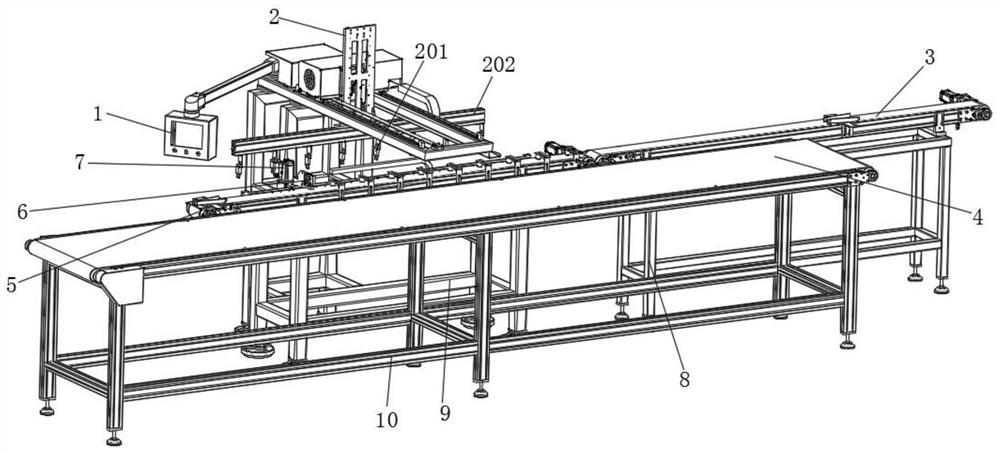
图中:1、穿磁线体人机界面;2、两轴机械手机构;201、抓手迷你夹;202、抓取治具;203、两轴机械手马达;204、上下轴传动臂;205、导轨座;206、移动座;3、翻转线体;4、换板线体;401、光电感应器;402、输送带;403、传动机构;404、输送辊;5、穿磁线体;501、穿磁线体马达;502、PVC草带;503、皮带线辊;504、轴承座;6、挡磁条气缸;7、挡磁条定位伺服电机;8、第一架体;9、第二架体;10、第三架体;11、挡磁线体。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-11,本发明提供一种技术方案:一种自动穿磁机,包括第三架体10和位于第三架体10一端的第一架体8与第二架体9,第一架体8的顶部安装有翻转线体3,第三架体10的顶部设有换板线体4,第二架体9顶部的一端分别设有两轴机械手机构2和穿磁线体人机界面1,第二架体9顶部的中间位置处设有穿磁线体5,第二架体9顶部靠近穿磁线体5的一端设有挡磁线体11,挡磁线体11顶部的一侧分别设有相互配合的挡磁条气缸6和挡磁条定位伺服电机7。
作为本实施例的优选方案:两轴机械手机构2包括抓手迷你夹201、抓取治具202、两轴机械手马达203、上下轴传动臂204和导轨座205,导轨座205位于两轴机械手机构2正面一端的顶部,导轨座205内侧的中间位置处设有相互配合的移动座206,移动座206的顶部分别设有两轴机械手马达203和上下轴传动臂204,上下轴传动臂204的底部设有抓取治具202,抓取治具202的底部均匀排设有抓手迷你夹201。
作为本实施例的优选方案:换板线体4包括光电感应器401、输送带402、传动机构403和输送辊404,输送辊404位于换板线体4的两侧,两组输送辊404的外侧设有输送带402,换板线体4正面一端一侧得顶部设有与一组输送辊404相互配合的传动机构403,换板线体4顶部的正面一端均匀排设有光电感应器401。
作为本实施例的优选方案:穿磁线体5包括穿磁线体马达501、PVC草带502、皮带线辊503和轴承座504,皮带线辊503位于穿磁线体5的两侧,两组皮带线辊503的外侧设有相互配合的PVC草带502,两组皮带线辊503的正面一端设有轴承座504,穿磁线体5一侧的背面一端设有穿磁线体马达501,且穿磁线体马达501与一组皮带线辊503相互连接。
作为本实施例的优选方案:导轨座205位居第三架体10和第二架体9的上方,两轴机械手机构2顶部的背面一端设有活动台,且活动台与穿磁线体人机界面1相互连接,便于调整穿磁线体人机界面1的使用方位,方便操作人员在不同方向进行控制。
作为本实施例的优选方案:移动座206底部的两侧设有滑动块,导轨座205顶部的两侧设有与滑动块相互适配的滑轨,提高移动座206移动以及上下轴传动臂204摆动的导向性和平稳性。
作为本实施例的优选方案:换板线体4顶部的背面一端均匀排设有定位夹具,且定位夹具与光电感应器401相互配合,可以检测产品的位置信息,传动机构403的外侧设有保护壳,且保护壳与第三架体10相互连接,增加传动机构的密封保护性。
作为本实施例的优选方案:第二架体9顶部靠近皮带线辊503的两侧设有连接架,且连接架与PVC草带502相互配合,增加该部件的限位效果,防止PVC草带502位置偏移,第一架体8、第二架体9和第三架体10的底部皆安设有固定盘,且固定盘的外侧设有防滑纹,提高装置整体的稳固性。
实施例1,如图1-2所示,该装置通过两轴机械手机构2、翻转线体3、换板线体4、穿磁线体5和挡磁线体11各个机械运行部位的有序衔接,让产品分别进行定位穿磁及穿磁后的自动双层摆料工作,并在挡磁条气缸6和挡磁条定位伺服电机7的产品限位下,提高两轴机械手机构2夹料期间的稳定性,通过穿磁线体人机界面1与控制系统相互配合,让各结构的动作运作更加灵活,该设备将伺服的速度模式和定位模式相互结合运用的设备,实现了精准自动穿磁、自动摆料、自动换板等工作,极大的加强产品的加工效率,便于该设备推广使用。
实施例2,如图1-4所示,当产品送入换板线体4上方时,通过换板线体4上方安置的光电感应器401及两轴机械手机构2上下动作步骤的信号输出,让输送带402表面的产品可利用传动机构403的启动迫使输送辊404转动,让输送带402随着输送辊404的旋转进行输送,促使产品在输送带402的输送下自动换板,实现了各控制系统的动作协调配合,增强装置的自动化工作效率。
工作原理:当装置在使用时,将胶条切割后并送入翻转线体3进行牵引,并通过定位导向功能进行自动翻转,在产品进行180度翻转后,接着将产品牵引送入穿磁线体5,期间利用穿磁线体马达501控制皮带线辊503转动,促使皮带线辊503在轴承座504的配合下让PVC草带502移动输送,进而使进入上方的产品移动,期间利用挡磁线体11、挡磁条气缸6和挡磁条定位伺服电机7根据需求进行阻挡,让磁条进行定位,即可使产品与两轴机械手机构2相互对应,此时通过穿磁线体人机界面1控制两轴机械手马达203驱动上下轴传动臂204移动和摆动,进行辅助定位及辅助穿磁,同时磁条切割后输送至磁条装置定位口部位,实现了磁条在每次穿入胶条之前的精准定位,实现了胶条自动穿磁及穿磁后的自动双层摆料,让产品在上下轴传动臂204的活动下迫使抓取治具202与抓手迷你夹201对产品进行夹取工作,之后将穿磁摆动后的产品送入换板线体4上方。
最后应当说明的是,以上内容仅用以说明本发明的技术方案,而非对本发明保护范围的限制,本领域的普通技术人员对本发明的技术方案进行的简单修改或者等同替换,均不脱离本发明技术方案的实质和范围。
- 自动穿磁线自动摆料机
- 一种自动穿磁机