一种距下关节制动器及其使用方法
文献发布时间:2023-06-19 11:54:11
技术领域
本发明属于骨科内植入物领域,具体涉及一种用于矫正柔韧性扁平足畸形的距下关节制动器及其使用方法。
背景技术
柔韧性扁平足在儿童和成人的发生率为5%,其主要病理特征是距下关节的过度外翻导致的足弓塌陷,引起足部疼痛和行走后易疲劳。距下制动术是指在跗骨窦内置入距下关节制动器以限制距下关节的过度外翻,是目前广泛应用的一种微创手术。
目前广泛使用的距下制动器主要分为两类:楔形自锁型和跟骨阻挡型,其中又以楔形自锁型应用最多,根据设计形态主要分为圆柱形(MBA假体)、圆锥形(Talar-Fit假体)及外侧圆锥形内侧圆柱形(HyproCure假体)。
由于跗骨窦形态不规则,而目前市面的假体均不能匹配,导致术后出现脱位、应力分布不均匀引起的疼痛,甚至发生距骨颈骨折或螺钉断裂。
发明内容
为解决上述问题,提供一种距下关节制动器,本发明采用了如下技术方案:
本发明提供了一种距下关节制动器,通过手术安装在用户的距下关节,其特征在于,包括:依次排布的前阻段、中阻段以及内阻段,其中,前阻段、中阻段以及内阻段的截面均为圆形,前阻段的截面的直径沿轴线方向先增大后减小,中阻段的截面的直径沿轴线方向的变化差值的范围为距下关节制动器的整体长度的0~3/500,内阻段的截面的直径沿远离中阻段的方向逐渐减小。
本发明提供的距下关节制动器,还可以具有这样的特征,其中,前阻段的长度为距下关节制动器的整体长度的1/2。
本发明提供的距下关节制动器,还可以具有这样的特征,其中,中阻段的长度为距下关节制动器的整体长度的1/4。
本发明提供的距下关节制动器,还可以具有这样的特征,其中,内阻段的长度为距下关节制动器的整体长度的1/4。
本发明提供的距下关节制动器,还可以具有这样的特征,其中,距下关节制动器的材料为钛合金。
本发明提供的距下关节制动器,还可以具有这样的特征,其中,距下关节制动器安装完成后,前阻段位于跗骨腔中,与骨头相接触,中阻段位于跗骨腔与跗骨管之间,内阻段位于跗骨管中。
本发明提供了一种上述距下关节制动器的使用方法,其特征在于,包括如下步骤:步骤S1,取跗骨窦切口1-2cm,并分离皮下组织至跗骨窦;步骤S2,由足的前外侧至后内侧的方向插入距下关节制动器的导针,并由内侧载距突上方穿出;步骤S3,在距下关节内翻位时植入距下关节制动器的试模根据判断标准确定合适的尺寸;步骤S4,沿导针将距下关节制动器安装在跗骨管,使得距下关节制动器的内阻段的远离中阻段的一端位于距骨轴线的40%处。
发明作用与效果
根据本发明的距下关节制动器通过手术安装在患者的距下关节,用于矫正柔韧性扁平足畸形,其特征为包括依次排布的前阻段、中阻段以及内阻段且前阻段、中阻段以及内阻段的截面均为圆形,各个部分的截面的直径具有特征,具体为前阻段的截面的直径沿轴线方向先增大后减小,中阻段的截面的直径沿轴线方向相对固定,内阻段的截面的直径沿远离中阻段的方向逐渐减小。本发明的距下关节制动器用球形拟合方法对平足症儿童的足部CT进行拟合,能够最大程度贴合不规则的距下关节表面,分散了距骨和跟骨与制动器的接触应力,避免术后疼痛,使制动器符合国人足的解剖形态。
附图说明
图1是本发明实施例的距下关节制动器的结构示意图;
图2是本发明实施例的距下关节制动器的设计拟合曲线图;
图3是本发明实施例的距下关节制动器安装完成的示意图。
具体实施方式
以下结合附图以及实施例来说明本发明的具体实施方式。
<实施例>
本实施例提供一种距下关节制动器及其使用方法,距下关节制动器通过手术安装在用户的距下关节,用于矫正柔韧性扁平足畸形,安装后增大了与关节面接触面积,减轻用户的疼痛情况。
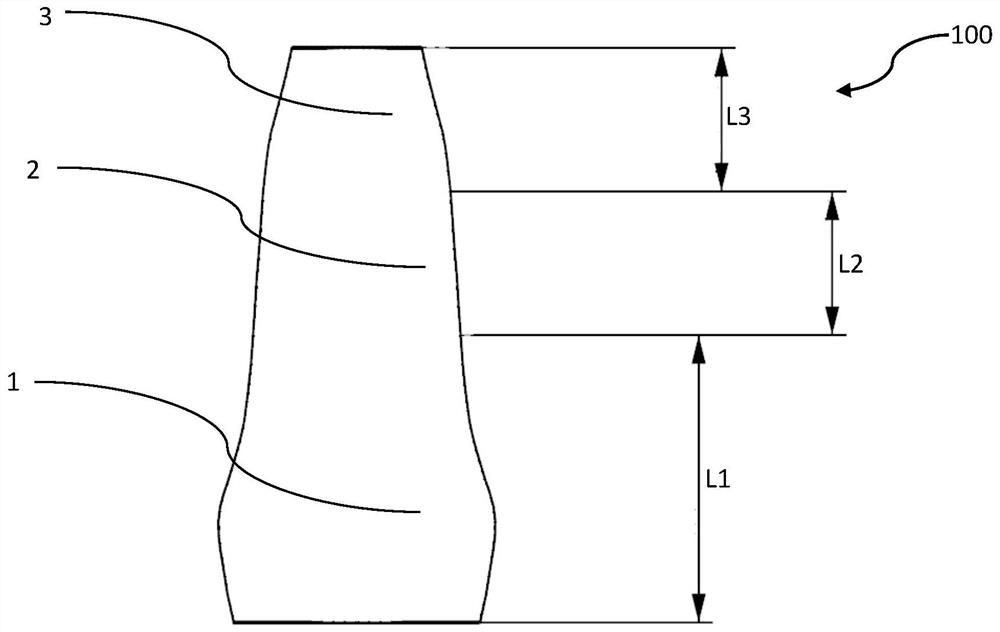
图1是本发明实施例的距下关节制动器的结构示意图。
距下关节制动器100呈柱状,如图1所示,包括沿轴线依次排布的前阻段1、中阻段2以及内阻段3。
前阻段1、中阻段2以及内阻段3的截面均为圆形。
本实施例提供的距下关节制动器经过对20例儿童平足症足部CT计算拟合得到,充分考虑了跗骨管和跗骨腔不规则的几何表面,采用球形拟合。
本实施例中,距下关节制动器100的材料为钛合金。
具体拟合方法如下:
首先沿着跗骨管设置一条基础线,使用球形拟合方法对跗骨管进行填充,对拟合后的球心进行最小二乘法得到手术时的引导线,以引导线为基础生成能够最大程度贴合跗骨管的标准化制动器,其中,距下关节制动器100最内端的安装位置为距骨轴的40%处。
图2是本发明实施例的距下关节制动器的设计拟合曲线图。
本实施例中,球形拟合方法即使用21个球体按照人体处于中立位时,即非负重状态时的内部结构由外向内依次生成拟合距下关节制动器100的结构。
本实施例中,由外向内指在距下关节制动器100安装时,穿过跗骨管的导针,从足前外侧穿入到从内侧载距突上方穿出的方向。
如图2所示,拟合生成的曲线图即为距下关节制动器100的截面沿轴线由外向内的直径变化图,1号球体为最外侧球体,21号球体为最内侧球体,得到的21球体的具体直径如表1所示。
表1球体拟合结果
如图1、图2以及表1所示,本实施例的距下关节制动器100的前阻段1、中阻段2以及内阻段3一体成型,为一个整体,前阻段1、中阻段2以及内阻段3按相邻球体的直径的变化率划分,具体结构如下:
本实施例中,距下关节制动器100的总长度为20mm。
前阻段1的截面的直径沿轴线方向先增大后减小,即在除去两端的中间部分具有最大值。
本实施例中,如表1所示,即球体编号为1-10的球体拟合得到的球体中,1-4号球体的直径逐渐增大,4-10号球体的直径逐渐减小,即在4号球体处直径具有最大值4.59mm。
前阻段1的长度L1为距下关节制动器100的整体长度的1/2,即10mm,本实施例中,在距下关节制动器100的由前阻段1的端部靠近中阻段2方向的长度在4mm处具有直径最大值4.59mm。
中阻段2的截面的直径沿轴线方向的变化差值为距下关节制动器100的整体长度的0~3/500,即本实施例中变化差值为0mm~0.12mm,即中阻段2的直径变化十分微小。
本实施例中,如表1所示,即球体编号为11-15的球体的直径小幅度逐渐减小,且变化差值范围为0mm~0.12mm。
中阻段2的长度L2为距下关节制动器100的整体长度的1/4,即5mm。
内阻段3的截面的直径沿轴线且远离中阻段2的方向逐渐减小。
本实施例中,如表1所示,即球体编号为16-21的球体的直径逐渐减小。
内阻段3的长度L3为距下关节制动器的整体长度的1/4,即5mm。
图3是本发明实施例的距下关节制动器安装完成的示意图。
本实施例的距下关节制动器100的具体使用过程如下:
步骤S1,取跗骨窦切口1-2cm,并分离皮下组织至跗骨窦。
步骤S2,由足的前外侧至后内侧的方向插入距下关节制动器100的导针,并由内侧载距突上方穿出。
步骤S3,在距下关节内翻位时植入距下关节制动器100的试模根据判断标准确定合适的尺寸。判断标准为距下关节制动器100的试模植入后保留距下关节外翻2°-4°。
步骤S4,沿穿过跗骨管的导针将距下关节制动器100安装在跗骨管,使得距下关节制动器100述内阻段3远离中阻段的一端位于距骨轴线的40%处。
本实施例的距下关节制动器100在手术安装时,沿着穿透跗骨管的引导线安装在跗骨管,如图3所示,其中内阻段3的最内端,即其远离中阻段2的一端位于距骨轴线200的40%处。
距骨轴线200具体为:以跗骨管中心轴线做垂面,其中与距骨21两端相切得平面包含得这段轴线即为距骨轴线200,以人体矢状轴为参考设定距骨轴线方向,则距骨轴线40%处为制动器安装位置。
安装好后的距下关节制动器100的前阻段1在跗骨腔中与骨头发生直接接触,从而达到制动效果;中阻段2的各个截面的直径不变,是从跗骨腔到跗骨管的过渡段,即处于跗骨腔到跗骨管之间;内阻段3位于跗骨管中,最内端位于距骨轴线200的40%处,用于防止距下关节制动器100在手术后从跗骨管中滑脱。
实施例作用与效果
本实施例提供的距下关节制动器用于矫正柔韧性扁平足畸形,通过手术安装在患者的距下关节,其特征为包括依次排布的前阻段、中阻段以及内阻段且前阻段、中阻段以及内阻段的截面均为圆形,各个部分的截面的直径具有特征,具体为前阻段的截面的直径沿轴线方向先增大后减小,中阻段的截面的直径沿轴线方向相对固定,内阻段的截面的直径沿远离中阻段的方向逐渐减小。本实施例的距下关节制动器用球形拟合方法对平足症儿童的足部CT进行拟合,能够最大程度贴合不规则的距下关节表面,分散了距骨和跟骨与制动器的接触应力,避免术后疼痛,使制动器符合国人足的解剖形态。
进一步,本实施例提供的距下关节制动器的前阻段、中阻段以及内阻段分别占距下关节制动器整体长度的一定比例,可以使得前阻段在跗骨腔中与骨头发生直接接触,从而达到制动效果;中阻段处于跗骨腔到跗骨管之间;内阻段位于跗骨管中,防止距下关节制动器在手术后从跗骨管中滑脱。
进一步,本实施例提供的距下关节制动器的材料为钛合金,钛合金的密度较小、强度较高且具有抗蚀性,在距下关节制动器安装后能够对人体的活动影响较小。
进一步,本实施例提供的距下关节制动器的使用方法中,距下关节制动器在安装时,其安装位置为距骨轴线40%处,当患者的足部进行内翻、外翻,背伸、跖屈运动时,此处的空间位置变化幅度最小。以此作为距下关节制动器的安装位置,能够避免制动器术后从跗骨管滑出,造成制动效果变差。
上述实施例仅用于举例说明本发明的具体实施方式,而本发明不限于上述实施例的描述范围。
- 一种距下关节制动器及其使用方法
- 一种用于治疗平足的距下关节制动器