基于无信号控制路口的车辆自动通行能力测试系统及方法
文献发布时间:2023-06-19 11:54:11
技术领域
本发明属于智能汽车领域,涉及一种基于无信号控制路口的车辆自动通行能力测试系统及方法。
背景技术
随着中国城镇化进程的加快,城市中的停车场资源愈发紧张,停车位空间越来越小,人们在工作和生活中需要花费大量时间寻找车位和停车。为解决停车难的问题,针对AVP(Automated Valet Parking;自主代客泊车)技术的研究和开发随之展开,由于AVP车辆运行范围内大部分的通行路口为无信号控制路口,因此针对AVP车辆通过无信号控制路口的功能测试的也愈发重要。
目前关于AVP功能测试有两种主要方法。第一种方法是AVP车辆到目标停车区域进行真实停车环境下测试,由于测试过程中会受到社会车辆的干扰,测试效率和安全性难以保证;第二种方法是根据场景分级理论形成AVP测试场景,然后在封闭场地中针对每个场景进行测试,但由于交通参与者复杂多变,目前行业内并没有公认的行之有效的测试场景库,且测试场景库的建立需要大量时间。
发明内容
发明要解决的问题:
针对以上存在的问题,本发明目的在于提供一种基于无信号控制路口的车辆自动通行能力测试系统及方法。
解决问题的技术手段:
为解决上述问题,本发明提供一种基于无信号控制路口的车辆自动通行能力测试系统,包括:用于设计交通参与者和主车通过无信号控制路口的测试场景类型的测试场景设计单元,其基于包括所述主车驶入所述无信号控制路口行驶方向的主车行车方向与主车速度以及所述交通参与者进入无信号控制路口的交通参与者起始位置、交通参与者运动方向与交通参与者速度的场景元素设计所述测试场景类型;以及用于测试所述主车驶入所述无信号控制路口的自动通行能力的测试控制单元,所述测试控制单元基于所述测试场景类型设计所述交通参与者在无信号控制路口撞上所述主车的车身位置的碰撞点,基于所述场景元素和预先设计的所述碰撞点计算所述主车的触发距离,控制所述主车的行驶模式以使所述主车不发生碰撞地通行。
根据本发明,能根据不同交通参与者的特性,设置不同的测试场景,并依据所述测试场景控制或设计车辆的行驶模式以使所述车辆与其他交通参与者不发生碰撞地通行。
也可以是,本发明中,所述测试控制单元在所述主车驶入所述触发距离以内时控制所述主车减速或是停止规定的时间。
也可以是,本发明中,所述测试场景设计单元包括:生成所述无信号控制路口的路口环境生成部;在所述无信号控制路口中生成所述交通参与者并规定所述交通参与者的运动状态的交通参与者生成部;和在所述无信号控制路口中生成所述主车并规定所述主车的行驶状态的主车生成部。
也可以是,本发明中,所述测试控制单元包括:设定所述交通参与者与所述主车的碰撞点的碰撞点设定部;基于所述场景元素和所述碰撞点计算所述主车的触发距离的触发距离计算部;以及控制所述主车以使所述主车不发生碰撞地通行的主车控制部。
也可以是,本发明中,所述主车的运动状态包括直行、左转和右转。
也可以是,本发明中,所述碰撞点为主车左侧前大灯内边缘点、主车前保险杠中间位置点或主车右侧前大灯内边缘点。
也可以是,本发明中,所述交通参与者包括在人行横道上运动的弱势交通参与者和在车道上行驶的干扰车。
也可以是,本发明中,所述弱势交通参与者包括行人和自行车。
也可以是,本发明中,所述无信号控制路口为没有交通信号的十字路口。
本发明还提供一种根据上述基于无信号控制路口的车辆自动通行能力测试系统的基于无信号控制路口的车辆自动通行能力测试方法,包括以下步骤:测试交通参与者通过无信号控制路口时的交通参与者速度;测试所述交通参与者的交通参与者起始位置;测试所述交通参与者进入无信号控制路口时的交通参与者运动方向;测试主车驶入无信号控制路口时的主车速度;测试所述主车驶入无信号控制路口时的主车行车方向;基于包括所述主车行车方向、所述主车速度、所述交通参与者起始位置、所述交通参与者运动方向与所述交通参与者速度的场景元素设计所述交通参与者和所述主车通过无信号控制路口的测试场景类型;以及基于所述测试场景类型设计交通参与者在无信号控制路口撞上所述主车的车身位置的碰撞点,利用所述主车速度、所述交通参与者速度和预先设置的安全距离设计主车的行驶模式以使所述车辆不发生碰撞地通行。
发明效果:
本发明能评估车辆在路口直行、左转、右转行驶过程中遇行人、车辆等的避障能力,改善车辆的避障性能。
附图说明
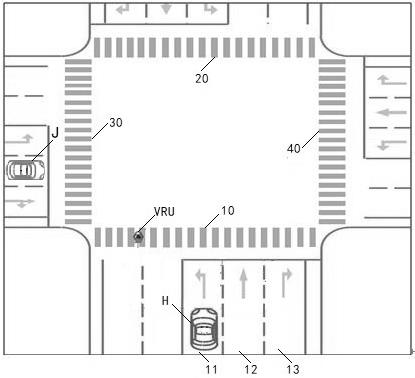
图1是根据本发明一实施形态的基于无信号控制路口的车辆自动通行能力测试场景的测试系统构建的无信号控制路口的车辆自动通行能力测试场景的示意图;
图2是主车与弱势交通参与者在无信号控制路口碰撞的测试场景1-1的示意图;
图3是主车与弱势交通参与者在无信号控制路口碰撞的测试场景1-2的示意图;
图4是主车与弱势交通参与者在无信号控制路口碰撞的测试场景1-3的示意图;
图5是主车与弱势交通参与者在无信号控制路口碰撞的测试场景1-4的示意图;
图6是主车与弱势交通参与者在无信号控制路口碰撞的测试场景1-5的示意图;
图7是主车与弱势交通参与者在无信号控制路口碰撞的测试场景1-6的示意图;
图8是主车与干扰车在无信号控制路口碰撞的测试场景2-1的示意图,(a)是主车直行通过路口且右手车道有干扰车右转的场景2-1-1的示意图,(b)是主车直行通过路口且右手车道有干扰车直行的场景2-1-2的示意图,(c)是主车直行通过路口且右手车道有干扰车左转的场景2-1-3的示意图;
图9是主车与干扰车在无信号控制路口碰撞的测试场景2-2的示意图,(a)是主车直行通过路口且左手车道有干扰车左转的场景2-2-1的示意图,(b)是主车直行通过路口且左手车道有干扰车直行的场景2-2-2的示意图;
图10是主车与干扰车在无信号控制路口碰撞的测试场景2-3的示意图;
图11是主车与干扰车在无信号控制路口碰撞的测试场景2-4的示意图,(a)是主车左转通过路口且右手车道有干扰车直行的场景2-4-1的示意图,(b)是主车左转通过路口且右手车道有干扰车右转的场景2-4-2的示意图;
图12是主车与干扰车在无信号控制路口碰撞的测试场景2-5的示意图,(a)是主车左转通过路口且左手车道有干扰车左转的场景2-5-1的示意图,(b)是主车左转通过路口且左手车道有干扰车直行的场景2-5-2的示意图;
图13是主车与干扰车在无信号控制路口碰撞的测试场景2-6的示意图,(a)是主车左转通过路口且对向车道有干扰车右转的场景2-6-1的示意图,(b)是主车左转通过路口且对向车道有干扰车直行的场景2-6-2的示意图;
图14是主车与干扰车在无信号控制路口碰撞的测试场景2-7的示意图;
图15是主车与干扰车在无信号控制路口碰撞的测试场景2-8的示意图;
符号说明:
10、第一人行横道;20、第二人行横道;30、第三人行横道;40、第四人行横道;11、第一左转车道;12、第一直行车道;13、第一右转车道;H、主车;VRU、弱势交通参与者;J、干扰车。
具体实施方式
以下结合附图和下述实施方式进一步说明本发明,应理解,附图和下述实施方式仅用于说明本发明,而非限制本发明。
本发明公开了一种基于无信号控制路口的车辆自动通行能力测试系统及方法,其生成无信号控制路口的车辆自动通行能力测试场景以测试车辆自动通行能力。
本发明中,基于无信号控制路口的车辆自动通行能力测试场景的测试系统(以下有时简称“测试系统”)包括测试场景设计单元和测试控制单元。
测试场景设计单元用于设计交通参与者和主车通过无信号控制路口的测试场景类型,其可以包括:生成无信号控制路口环境的路口环境生成部;在无信号控制路口场景中生成主车的主车生成部;以及在无信号控制路口环境中生成交通参与者的交通参与者生成部。
图1是测试系统构建的无信号控制路口的车辆自动通行能力测试场景(以下有时简称“测试场景”)的示意图。如图1所示,本实施形态中,路口环境生成部生成的无信号控制路口场景为无信号控制的十字路口,包括第一至第四路口,该第一至第四路口分别包括多条驶出车道和驶入车道,在驶出车道的前端设置有停车线,在停车线前方的规定距离处分别设置有人行横道。进一步地,路口环境生成部还设定每个路口上的车道数量、车道宽度T
又如图1所示,主车生成部在无信号控制路口场景中生成作为需要进行自动通行能力测试的车辆的主车H,主车行车方向根据主车H所处的车道对应地设计为路口直行、路口左转和路口右转。主车H可以设置于第一至第四路口中的任何一个路口,以下以主车H设置于第一路口为例进行说明。如未特别说明,后述述及“纵向”即为主车的前后方向,“横向”为主车的车宽方向。
交通参与者生成部在无信号控制路口场景中生成交通参与者,本发明中交通参与者可以是行人、自行车等弱势交通参与者VRU(Vulnerable Road Users;即弱势道路使用者)和与主车H同为车辆的干扰车J。具体而言,弱势交通参与者VRU可以通过位于主车H前方近处的第一人行横道10、位于主车H前方远处的第二人行横道20、位于主车H左侧的第三路口的第三人行横道30或位于主车H右侧的第四路口的第四人行横道40,测试弱势交通参与者VRU沿人行横道以匀速横穿道路时是否与主车H发生碰撞以及具体的碰撞位置(即后述的碰撞点)。另一方面,与主车H同为车辆的干扰车J可以生成于除第一路口之外的其他任一路口,其以匀速沿与主车H大致相向的方向行驶,与主车H发生交汇乃至碰撞。
进一步地,主车生成部还设定主车H的主车基本参数和主车H的主车行驶状态,该主车基本参数例如包括主车车宽Lsv,主车行驶状态例如包括主车行车方向(即左转、右转还是直行)和主车速度Vsv,该主车速度还可以包括主车H所处的主车车道。交通参与者生成部还设定包括弱势交通参与者VRU的弱势交通参与者速度V
测试控制单元用于测试主车H驶入无信号控制路口的自动通行能力,其可以包括:设定交通参与者与主车H的碰撞点的碰撞点设定部;基于上述场景元素和预先设计的碰撞点计算主车H的触发距离Dp
[实施例1]
作为实施例1,表1列出了交通参与者为横穿人行横道的弱势交通参与者VRU时测试系统设计的横穿场景分类,具体为以下六种。
表1
图2是主车H以主车速度Vsv与弱势交通参与者VRU在无信号控制路口碰撞的测试场景1-1的示意图,该测试场景1-1示出了主车H以主车速度Vsv行驶直行通过路口且弱势交通参与者VRU沿第一人行横道10横穿无信号控制路口的状况。首先参照图2,以主车H直行通过第一路口且弱势交通参与者VRU横穿第一人行横道10的测试场景1-1为例说明测试场景中的各场景元素。
如图2所示,该测试场景中的场景元素包括:
a)主车速度Vsv为主车H的车头与停车线距离为T时主车H须到达设计最大车速,由此能确保每次测试开始前主车速度一致;
b)A、A’点定义为弱势交通参与者VRU的一对第一弱势交通参与者起始位置,其在横向上分别位于主车H所处车道即第一直行车道12的中心线两侧T
c)触发距离Dp
d)E、F、G点为主车H在与弱势交通参与者VRU碰撞时,测试系统设计的三个碰撞点(即,主车左侧前大灯内边缘点、主车前保险杠中间位置点以及主车右侧前大灯内边缘点)在人行横道上对应的碰撞位置,因此以下有时也会将E、F、G点称为碰撞点;
e)Dp
如图2所示,弱势交通参与者VRU沿第一人行横道10以弱势交通参与者速度V
本实施形态中,根据弱势交通参与者VRU的弱势交通参与者起始位置、主车车道宽度T
如图2所示,在将距离车道中心线T
另一方面,在将距离车道中心线T1的位置即第一弱势交通参与者起始位置A点或A’点作为弱势交通参与者匀速段起始位置时,若设定弱势交通参与者VRU与主车H的碰撞点为E点,则弱势交通参与者匀速段距离为Dp
表2
本实施形态中,作为一个示例,测试场景设计单元可以设定车道宽度T
又如图2所示,当行人匀速段起始位置为B点时,行人从距离车道中心线1.6m的位置,分别以2km/h、5km/h和8km/h的运动速度从左到右匀速通过第一人行横道10,此时主车例如以5km/h的速度从垂直于第一人行横道的车道匀速驶向无信号控制路口。
具体而言,主车H以5km/h的速度从垂直于第一人行横道10的第一直行车道12匀速驶向无信号控制路口,行人以2km/h的慢走速度从第一人行横道上的B点、即行人从距离车道中心线1.6m的位置自左向右匀速通过第一人行横道10。当设定行人与主车H在第一人行横道10上的E点相撞,换言之行人与主车H在第一人行横道10上碰撞于主车左侧前大灯内边缘点位置时,行人匀速段距离为Dp
同样地,行人以5km/h的正常行走速度从第一人行横道10上的B点,即行人从距离车道中心线1.6m的位置自左向右匀速通过第一人行横道10。当设定行人与主车H在第一人行横道10上的E点相撞,换言之行人与主车H在第一人行横道10上碰撞于主车左侧前大灯内边缘点位置时,行人匀速段距离为Dp
同样地,行人以8km/h的正常行走速度从第一人行横道10上的B点,即行人从距离车道中心线1.6m的位置自左向右匀速通过第一人行横道10。当设定行人与主车H在第一人行横道10上的E点相撞,换言之行人与主车H在第一人行横道10上碰撞于主车左侧前大灯内边缘点位置时,行人匀速段距离为Dp
像这样,当行人位于第一人行横道上B点或B’点即行人距离车道中心线1.6m,且设定的主车速度V
另一方面,当行人匀速段起始位置为A点或A’点时,行人从距离车道中心线3.2m的位置,分别以2km/h、5km/h和8km/h的运动速度从左到右匀速通过第一人行横道10,此时主车例如以5km/h的速度从垂直于第一人行横道的车道匀速驶向无信号控制路口。当设定行人与主车H在第一人行横道10上的E点、F点或G点分别相撞,换言之行人与主车H在第一人行横道10上碰撞于主车左侧前大灯内边缘点位置、主车前保险杠中间位置点(车辆品牌logo位置)或碰撞于主车右侧前大灯内边缘点位置时,行人匀速段距离为Dp
像这样,当行人位于第一人行横道上A点或A’点即行人距离车道中心线3.2m,且设定的主车速度V
当弱势交通参与者VRU是自行车时,自行车的运动速度可以设定为10km/h。进一步地,自行车匀速段起始位置为B点或B’点时,自行车从距离车道中心线1.6m的位置以10km/h的运动速度从左到右匀速通过第一人行横道10,此时主车例如以5km/h的速度从垂直于第一人行横道的车道匀速驶向无信号控制路口。当设定自行车与主车H在第一人行横道10上的E点、F点或G点分别相撞时,计算得到主车H的触发距离Dp
以上说明了在测试场景1-1、即主车H以一定速度行驶直行通过路口,第一人行横道10有弱势交通参与者VRU横穿的场景下,主车H在10.38m的触发距离下自动选择降速行驶模式将行驶速度降低到5 km/h以下或是制动规定的时间,就能不与弱势交通参与者VRU不发生碰撞地顺利通过无信号控制路口。
图3至图7分别是主车H与弱势交通参与者VRU在无信号控制路口碰撞的测试场景1-2至1-6的示意图。与测试场景1-1同样地,可以计算出当弱势交通参与者VRU为行人且分别以2km/h、5km/h和8km/h的速度与主车H碰撞、或是弱势交通参与者VRU为自行车而以10km/h的速度与主车H碰撞时,主车H的最大触发距离Dp
[实施例2]
作为实施例2,表3列出了交通参与者为干扰车J时测试系统设计的横穿场景分类,具体为以下八种。
表3
图8是主车H以主车速度Vsv与干扰车J以干扰车速度V
如图8中(a)所示,该测试场景中的场景元素包括:
a)主车速度Vsv为主车H在停车线前须达到的最大车速,由此能确保每次测试开始前主车速度一致;
b)触发距离Dp
c)干扰车匀速段距离Dp
如图8中(a)所示,主车H以主车速度Vsv沿第一直行车道12向前方匀速直行,干扰车J位于右手车道、即第四路口的第四右转车道以干扰车速度V
表4
本实施形态中,主车H的行驶速度V
如图8中(a)所示,干扰车J分别以15km/h、20km/h、25km/h和30km/h的行驶速度从右手车道右转进入第二路口,此时主车H例如以15km/h的速度从第一路口匀速直行驶向无信号控制路口。当设定干扰车J与主车H在规定的碰撞点、即主车右前大灯且干扰车左侧B柱的位置碰撞时,可以计算得到或测量得到各干扰车车速下的干扰车匀速段距离Dp
又如图8中(b)所示,干扰车J分别以15km/h、20km/h、25km/h和30km/h的行驶速度从右手车道直行进入第三路口,此时主车H以15km/h的速度从第一路口匀速直行驶向无信号控制路口。当设定干扰车J与主车H在规定的碰撞点、即主车前保险杠中间处且干扰车左侧B柱的位置碰撞时,可以计算得到或测量得到各干扰车车速下的干扰车匀速段距离Dp
还如图8中(c)所示,干扰车J分别以15km/h、20km/h、25km/h和30km/h的行驶速度从右手车道左转进入第一路口,此时主车H以15km/h的速度从第一路口匀速直行驶向无信号控制路口。当设定干扰车J与主车H在规定的碰撞点、即主车左前大灯且干扰车左侧B柱的位置碰撞时,可以计算得到或测量得到各干扰车车速下的干扰车匀速段距离Dp
图9至图15分别是主车H与干扰车J在无信号控制路口碰撞的测试场景2-2至2-8的示意图。与测试场景2-1同样地,可以计算出当干扰车J分别以15km/h、20km/h、25km/h和30km/h的速度与主车H碰撞时主车H的触发距离Dp
根据上述基于无信号控制路口的车辆自动通行能力测试系统,本发明还提供了一种基于无信号控制路口的车辆自动通行能力测试方法,其包括以下步骤:
(1)测试交通参与者通过无信号控制路口时的交通参与者速度(弱势交通参与者速度V
(2)测试交通参与者的交通参与者起始位置,例如起始于第一弱势交通参与者起始位置A、A’或第二弱势交通参与者起始位置B、B’等;
(3)测试交通参与者进入无信号控制路口时的交通参与者运动方向;
(4)测试主车H驶入无信号控制路口时的主车速度Vsv;
(5)测试主车H驶入无信号控制路口时的主车行车方向;
(6)基于包括主车行车方向、主车速度、交通参与者起始位置、交通参与者运动方向与交通参与者速度的场景元素设计交通参与者和主车通过无信号控制路口的测试场景类型;
(7)基于测试场景类型设计交通参与者在无信号控制路口撞上主车的车身位置的碰撞点,利用主车速度、交通参与者速度和预先设置的安全距离设计主车的行驶模式以使车辆不发生碰撞地通行。
本发明能根据不同交通参与者(与主车可能发生碰撞的道路使用者)的特性,设置不同的测试场景,并依据所述测试场景控制或设计车辆的行驶模式以使所述车辆与其他交通参与者不发生碰撞地通行。通过本发明的测试系统或测试方法,可评估AVP车辆在路口直行、左转、右转行驶过程中遇行人、车辆等的避障能力。
以上的具体实施方式对本发明的目的、技术方案和有益效果进行了进一步详细说明,应当理解的是,以上仅为本发明的一种具体实施方式而已,并不限于本发明的保护范围,在不脱离本发明的基本特征的宗旨下,本发明可体现为多种形式,因此本发明中的实施形态是用于说明而非限制,由于本发明的范围由权利要求限定而非由说明书限定,而且落在权利要求界定的范围,或其界定的范围的等价范围内的所有变化都应理解为包括在权利要求书中。凡在本发明的精神和原则之内的,所做出的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于无信号控制路口的车辆自动通行能力测试系统及方法
- 基于无信号控制路口的车辆自动通行能力测试系统及方法