一种基于稠密点云的集卡定位方法及装置
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及集装箱卡车的放箱操作领域,尤其涉及一种基于稠密点云的集卡定位方法及装置。
背景技术
随着经济技术的发展,越来越多的高新技术被应用到码头,自动化以及智能化逐渐成为未来码头发展的趋势和方向。目前码头对于集装箱卡车(内集卡或外集卡)的放箱操作大多还是采用人工来完成,不仅作业效率很低,而且作业质量不稳定不可控。码头进行人工作业,影响自动化、智能化作业实现的一个重要的障碍在于,集卡的定位难以达到较高的精度。
因此有必要提供一种基于稠密点云的集卡定位方法及装置,能够更精准地定位集卡。
发明内容
本发明所要解决的技术问题是提供基于稠密点云的集卡定位方法及装置,通过比较已有帧获取和当前帧获取的集卡车板的特征,然后计算集卡的位姿,能够更精准地定位集卡,从而大大提高集卡放箱作业的成功率。
本发明为解决上述技术问题而采用的技术方案是提供一种基于稠密点云的集卡定位方法,包括以下步骤:
使用至少一个传感器获取所述集卡的稠密点云数据,将所述稠密点云数据平面拟合后得到所述集卡车板的平面;
根据所述集卡车板的平面分割点云,在分割后得到的点云中进行聚类并识别所述集卡车板的特征;
比较已有帧获取的所述集卡车板的特征和当前帧获取的所述集卡车板的特征,若当前帧获取的所述集卡车板的特征少于已有帧获取的所述集卡车板的特征,则根据已有帧获取的所述集卡车板的特征对当前帧获取的所述集卡车板的特征进行补全后得到所述集卡车板的完整特征;
根据所述集卡车板的完整特征计算所述集卡的位姿。
优选地,在使用至少一个传感器获取集卡的稠密点云数据之后,对所述集卡进行初步定位,若存在所述集卡不在视野内或距离远或快速移动的情况,则等待并继续获取所述集卡的稠密点云数据。
优选地,当所述集卡是内集卡时,所述集卡车板平面的特征为挡板,当所述集卡是外集卡时,所述集卡车板平面的特征为锁钮。
优选地,所述传感器包括深度相机和/或激光雷达。
优选地,所述已有帧为第一帧,所述第一帧包括所述集卡车板的完整特征,若所述当前帧获取的所述集卡车板的特征少于所述第一帧获取的所述集卡车板的特征,则根据所述第一帧获取的所述集卡车板的特征对当前帧获取的所述集卡车板的特征进行补全后得到所述集卡车板的完整特征。
优选地,所述已有帧为前一帧,从第一帧开始,对每一帧获取的所述集卡车板的特征进行特征索引的排序,对当前帧的特征索引与前一帧的特征索引进行匹配,未匹配到的特征则根据前一帧特征以及来自匹配成功特征的位移进行补全;
若补全后仍未得到所述集卡车板的完整特征,则依次对当前帧的特征索引与再前一帧的特征索引进行匹配,直到获得所述集卡车板的完整特征为止。
优选地,还包括以下步骤:
若所述当前帧获取的所述集卡车板的特征和所述第一帧获取的所述集卡车板的特征一致,则根据当前帧获取的所述集卡车板的特征的坐标位置得到起重机相对于集卡在大车、小车、吊具方向上的距离以及角度;
若所述当前帧获取的所述集卡车板的特征少于第一帧获取的所述集卡车板的特征,则根据所述集卡车板的完整特征的坐标位置得到所述起重机相对于集卡在大车、小车、吊具方向上的距离以及角度。
优选地,所述使用至少一个传感器获取所述集卡的稠密点云数据包括当使用多个传感器获取所述集卡的稠密点云数据时,根据所述多个传感器的校准外参以将所述多个传感器获取的所述集卡的稠密点云数据进行拼接得到拼接后的所述集卡的稠密点云数据。
优选地,所述至少一个传感器安装在大车靠近集卡车道一侧上方的电气房或横梁上,或安装在大车靠近集卡车道一侧顶部走廊的内侧。
本发明为解决上述技术问题而还采用的技术方案是提供一种基于稠密点云的集卡定位装置,使用上述任一项所述的基于稠密点云的集卡定位方法。
本发明对比现有技术有如下的有益效果:本发明提供的基于稠密点云的集卡定位方法及装置,获取集卡车板的平面分割点云之后,聚类并识别集卡车板的特征,通过比较已有帧获取的集卡车板的特征和当前帧获取的集卡车板的特征,补全当前帧获取的集卡车板的特征后得到集卡车板的完整特征,再根据集卡车板的完整特征计算集卡的位姿,能够更精准地定位集卡,提高检测稳定性,从而大大提高集卡放箱作业的成功率;
进一步地,通过比较已有帧获取的集卡车板的特征和第一帧获取的集卡车板的特征,补全当前帧获取的集卡车板的特征后得到集卡车板的完整特征,再根据集卡车板的完整特征计算集卡的位姿,将第一帧获取的集卡车板的特征作为标准进行比对,从而能够快速补全集卡车板的完整特征;
进一步地,已有帧为前一帧,从第一帧开始,对每一帧获取的所述集卡车板的特征进行特征索引的排序,对当前帧的特征索引与前一帧的特征索引进行匹配,未匹配到的特征则根据前一帧特征以及来自匹配成功特征的位移进行补全,若补全后仍未得到集卡车板的完整特征,则依次对当前帧的特征索引与再前一帧的特征索引进行匹配,直到获得集卡车板的完整特征为止,从而能够更为精准地补全集卡车板的完整特征。
附图说明
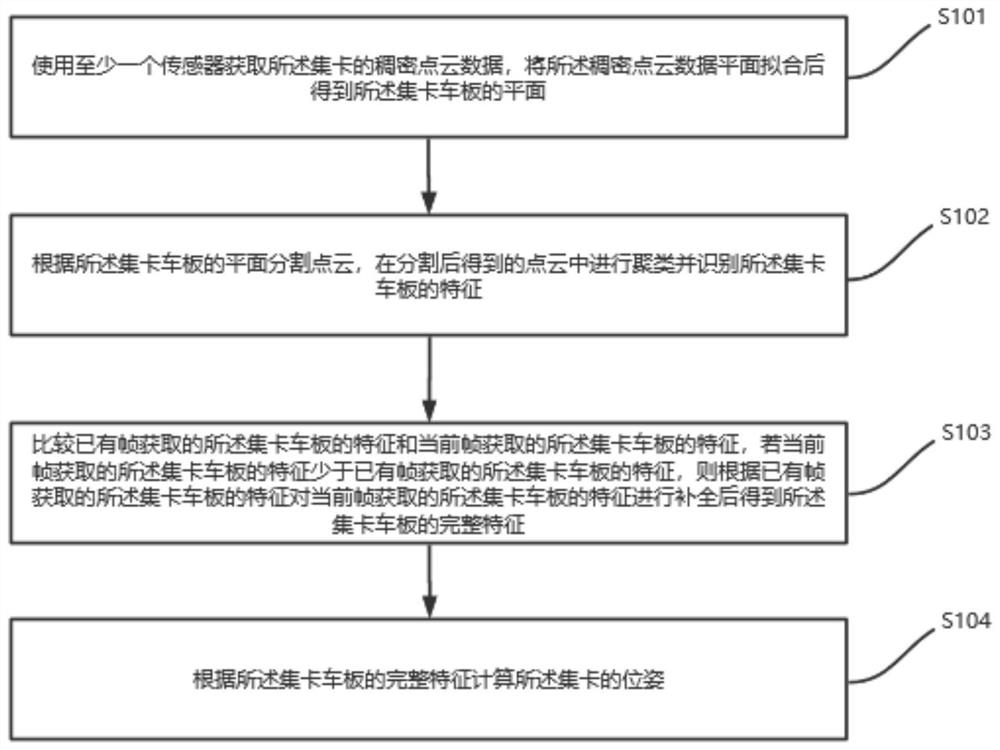
图1为本发明实施例中基于稠密点云的集卡定位方法的流程图;
图2为现有技术中外集卡的车板结构示意图;
图3为现有技术中内集卡的车板结构示意图;
图4为本发明实施例中外集卡近起重机侧的车板结构示意图;
图5为本发明实施例中内集卡近起重机侧的车板结构示意图;
图6为本发明实施例中基于稠密点云的集卡定位装置的结构示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步的描述。
在以下描述中,为了提供本发明的透彻理解,阐述了很多具体的细节。然而,本发明可以在没有这些具体的细节的情况下实践,这对本领域普通该技术人员来说将是显而易见的。因此,具体的细节阐述仅仅是示例性的,具体的细节可以由奔放的精神和范围而变化并且仍被认为是在本发明的精神和范围内。
现在参看图1,图1为本发明实施例中基于稠密点云的集卡定位方法的流程图。一种基于稠密点云的集卡定位方法,包括以下步骤:S101:使用至少一个传感器获取所述集卡的稠密点云数据,将所述稠密点云数据平面拟合后得到所述集卡车板的平面;S102:根据所述集卡车板的平面分割点云,在分割后得到的点云中进行聚类并识别所述集卡车板的特征;S103:比较已有帧获取的所述集卡车板的特征和当前帧获取的所述集卡车板的特征,若当前帧获取的所述集卡车板的特征少于已有帧获取的所述集卡车板的特征,则根据已有帧获取的所述集卡车板的特征对当前帧获取的所述集卡车板的特征进行补全后得到所述集卡车板的完整特征;S104:根据所述集卡车板的完整特征计算所述集卡的位姿。
现在参看图2和图3,图2为现有技术中外集卡的车板结构示意图,外集卡21包括外集卡车头22和外集卡车尾23,图3为现有技术中内集卡的车板结构示意图,内集卡31包括内集卡车头32和内集卡车尾33。
现在参看图4和图5,图4为本发明实施例中外集卡近起重机侧的车板结构示意图,外集卡41包括外集卡车头42和外集卡车尾43,44为外集卡近起重机侧,图5为本发明实施例中内集卡近起重机侧的车板结构示意图,内集卡51包括内集卡车头52和内集卡车尾53,54为内集卡近起重机侧。当所述集卡是外集卡41时,所述集卡车板平面的特征为锁钮45,当所述集卡是内集卡51时,所述集卡车板平面的特征为挡板55。
在具体实施中,所述传感器包括深度相机和/或激光雷达。深度相机相比较于传统的相机,深度相机在功能上添加了一个深度测量,从而更方便准确的感知周围的环境及变化。通过深度相机采集到集卡的彩色和深度图像帧并生成稠密点云数据。激光雷达(LiDAR,Light Detection and Ranging)是以发射激光束探测目标的位置、速度等特征量的雷达系统,激光雷达可以获取集卡的激光雷达点云数据。所述使用至少一个传感器获取所述集卡的稠密点云数据包括当单个传感器能够实现稠密点云的扫描,则使用一个传感器进行扫描,否则使用多个传感器对集卡进行扫描,当使用多个传感器获取所述集卡的稠密点云数据时,根据所述多个传感器的校准外参以将所述多个传感器获取的所述集卡的稠密点云数据进行拼接得到拼接后的所述集卡的稠密点云数据。
已有帧获取的所述集卡车板的特征包括深度相机和/或激光雷达获取的所有图像帧获取的集卡车板的特征。当前帧获取的所述集卡车板的特征包括深度相机和/或激光雷达获取的当前的实时图像帧获取的集卡车板的特征。通常认为在作业中特征可能在视野中部分消失,例如内集卡某一挡板被集装箱遮挡而在视野中消失,或外集卡某一锁钮被集装箱遮挡而在视野中消失。
在具体实施中,所述已有帧为第一帧,所述第一帧包括所述集卡车板的完整特征,第一帧特征为初始特征,通常第一帧数据得到的点云信息较为完备。若所述当前帧获取的所述集卡车板的特征少于所述第一帧获取的所述集卡车板的特征,也就是当前帧获取的所述集卡车板的特征由于被集装箱遮挡而部分消失,则根据所述第一帧获取的所述集卡车板的特征对当前帧获取的所述集卡车板的特征进行补全后得到所述集卡车板的完整特征。通过特征补全与跟踪获得完整的特征,从而使得集卡的位姿计算更加精确
在另一具体实施中,所述已有帧为前一帧,从第一帧开始,对每一帧获取的所述集卡车板的特征进行特征索引的排序,对当前帧的特征索引与前一帧的特征索引进行匹配,未匹配到的特征则根据前一帧特征以及来自匹配成功特征的位移进行补全;若补全后仍未得到所述集卡车板的完整特征,则依次对当前帧的特征索引与再前一帧的特征索引进行匹配,直到获得所述集卡车板的完整特征为止。
若所述当前帧获取的所述集卡车板的特征和所述第一帧获取的所述集卡车板的特征一致,则根据当前帧获取的所述集卡车板的特征的坐标位置得到起重机相对于集卡在大车、小车、吊具方向上的距离以及角度(x,y,z,θ);若所述当前帧获取的所述集卡车板的特征少于第一帧获取的所述集卡车板的特征,则根据所述集卡车板的完整特征的坐标位置得到所述起重机相对于集卡在大车、小车、吊具方向上的距离以及角度(x,y,z,θ)。
在使用至少一个传感器获取集卡的稠密点云数据之后,为了进一步提高获取点云数据的效率,可以先对所述集卡进行初步定位,该阶段对定位精度要求低,对视野内点云进行聚类与过滤,得到所有视野内的集卡,若存在所述集卡不在视野内或距离远或快速移动的情况,则等待并继续获取所述集卡的稠密点云数据,从而能够获取高质量的集卡的稠密点云数据。
现在参看图6,图6为本发明实施例中基于稠密点云的集卡定位装置的结构示意图。61是大车,62是小车,63是吊具,所述至少一个传感器安装在大车靠近集卡车道一侧64上方的电气房或横梁上66和/或67,或安装在大车靠近集卡车道一侧64顶部走廊的内侧65。
本发明为解决上述技术问题而还采用的技术方案是提供一种基于稠密点云的集卡定位装置,使用上述任一项所述的基于稠密点云的集卡定位方法。
综上,本实施例提供的基于稠密点云的集卡定位方法及装置,获取集卡车板的平面分割点云之后,聚类并识别集卡车板的特征,通过比较已有帧获取的集卡车板的特征和当前帧获取的集卡车板的特征,补全当前帧获取的集卡车板的特征后得到集卡车板的完整特征,再根据集卡车板的完整特征计算集卡的位姿,能够更精准地定位集卡,提高检测稳定性,从而大大提高集卡放箱作业的成功率;
进一步地,通过比较已有帧获取的集卡车板的特征和第一帧获取的集卡车板的特征,补全当前帧获取的集卡车板的特征后得到集卡车板的完整特征,再根据集卡车板的完整特征计算集卡的位姿,将第一帧获取的集卡车板的特征作为标准进行比对,从而能够快速补全集卡车板的完整特征;
进一步地,已有帧为前一帧,从第一帧开始,对每一帧获取的所述集卡车板的特征进行特征索引的排序,对当前帧的特征索引与前一帧的特征索引进行匹配,未匹配到的特征则根据前一帧特征以及来自匹配成功特征的位移进行补全,若补全后仍未得到集卡车板的完整特征,则依次对当前帧的特征索引与再前一帧的特征索引进行匹配,直到获得集卡车板的完整特征为止,从而能够更为精准地补全集卡车板的完整特征。
虽然本发明已以较佳实施例揭示如上,然其并非用以限定本发明,任何本领域技术人员,在不脱离本发明的精神和范围内,当可作些许的修改和完善,因此本发明的保护范围当以权利要求书所界定的为准。
- 一种基于稠密点云的集卡定位方法及装置
- 一种基于稠密点云与合成视图的视觉跟踪定位方法