一种极地船舶破冰能力动态评估方法
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及极地船舶技术领域,尤其是一种极地船舶破冰能力动态评估方法。
背景技术
目前世界各极地考察大国均在加紧进行极地海洋战略部署,极地航行船舶作为极区航运贸易、航道开辟及维护、资源开发等的必要装备,理所当然成为各国造船界的新目标。极地恶劣的环境条件使得极地航行船舶与常规船舶设计存在较大区别,海冰、低温严寒等水文和气象环境使得极地航行船舶的设计技术和性能预报技术与常规船舶相比更为复杂。极地航行船舶除了要求具备良好的敞水航行性能之外,还要具有良好的冰区航行性能、优良的破冰性能以及冰区操作性能。
由于海冰存在形式的不同导致极地航行船舶的航行工况主要包括连续式破冰和冲撞式破冰两种,连续式破冰是指极地航行船舶利用艏部特殊结构以及螺旋桨推力执行作业并保持稳定航速的工作方式,适用于常规的层冰冰况。冲撞式破冰是指极地航行船舶倒退数米并以全速冲撞冰层达到破冰航行目的的作业方式,适用于厚冰况或冰脊等恶劣冰况。连续破冰是中高冰级极地船舶最典型的破冰方式,优良的破冰能力是确保船舶极区安全运营的关键,破冰能力是极地船舶在平整冰中破冰航行性能优劣的重要评价指标,破冰能力通过冰厚与速度曲线(h-v曲线)来描述,h-v曲线表征了船舶使用满额功率在特定冰厚下所能达到的航速。
目前,新船破冰能力精确评估主要通过冰水池模型试验结果换算至实船结果,冰水池模型试验具有周期长、成本高等不足,尤其我国大型冰水池建设尚处于起步阶段,不能有效支撑破冰能力评估和极地船舶研发,开发精确高效的破冰能力评估方法具有重要的现实意义。
发明内容
本发明人针对上述问题及技术需求,提出了一种极地船舶破冰能力动态评估方法,本发明的技术方案如下:
一种极地船舶破冰能力动态评估方法,该方法包括:
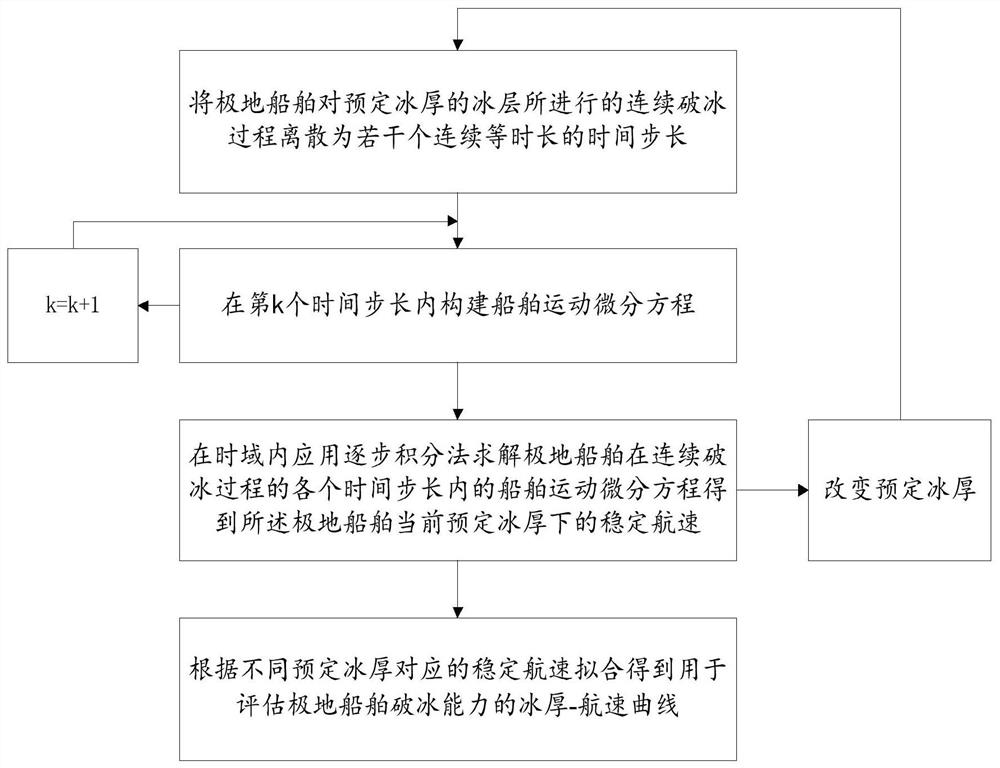
将极地船舶对预定冰厚的冰层所进行的连续破冰过程离散为若干个连续等时长的时间步长,在任意第k个时间步长内执行如下步骤S1-S5,k为时间步长参数且起始值为0:
步骤S1,根据极地船舶受到的第i迭代载荷
步骤S2,基于第i+1迭代航速
步骤S3,对冰层在第k个时间步长内的第i迭代冰层结构进行方形网格离散为若干个尺寸相同的正方形的冰网格,基于第i+1迭代位置
步骤S4,由冰阻力、螺旋桨净推力和其他外部载荷计算得到极地船舶受到的第i+1迭代载荷
步骤S5,若基于第i迭代载荷
在时域内应用逐步积分法求解极地船舶在连续破冰过程的各个时间步长内的船舶运动微分方程得到极地船舶当前预定冰厚下的稳定航速;
改变预定冰厚并重新执行将极地船舶对预定冰厚的冰层所进行的连续破冰过程离散为若干个连续等时长的时间步长的步骤得到对应的稳定航速,根据不同预定冰厚对应的稳定航速拟合得到用于评估极地船舶破冰能力的冰厚-航速曲线。
其进一步的技术方案为,基于第i+1迭代航速
其进一步的技术方案为,船舶运动微分方程为六自由度运动方程,其他外部载荷包括船体水动力和舵外力;
则极地船舶受到的迭代载荷包括六个自由度的载荷分量为纵荡载荷分量X、横荡载荷分量Y、垂荡载荷分量Z、横摇载荷分量K、纵摇载荷分量M、艏摇载荷分量N,其中:
其中,X
其进一步的技术方案为,将螺旋桨净推力和舵外力合并分解到极地船舶纵荡方向、横荡方向和艏摇方向的结果分别为:
其中,F
其进一步的技术方案为,破冰阻力包括冰层中与极地船舶发生接触的接触冰网格产生的作用于极地船舶的挤压力和摩擦力,挤压力是接触冰网格产生的垂直于接触面且指向船舶内部的力;则破冰阻力在极地船舶六个自由度方向的分量表示为:
其中,X
其进一步的技术方案为,浸没冰阻力为:
其中,ρ
其进一步的技术方案为,在对冰层在第k个时间步长内的第i迭代冰层结构进行方形网格离散时,每个冰网格的边长与冰层厚度以及第i+1迭代航速
其进一步的技术方案为,基于第i+1迭代位置
根据第i+1迭代位置
根据第i+1迭代水线位置和离散后的第i迭代冰层结构确定冰层中与所极地船舶发生接触的接触冰网格及其与极地船舶的接触面积;
基于每个接触冰网格的接触面积计算得到接触冰网格产生的垂直于接触面且指向极地船舶内部的挤压力;
基于每个接触冰网格产生的挤压力以及第i+1迭代航速计算得到接触冰网格产生的作用于极地船舶的摩擦力;
将每个接触冰网格产生的挤压力和摩擦力投影到随船固连坐标系统中得到接触冰网格产生的作用于极地船舶的破冰阻力,并根据各个接触冰网格产生的破冰阻力对第i迭代冰层结构迭代得到第i+1迭代冰层结构;
基于第i+1迭代航速计算浸没冰阻力。
其进一步的技术方案为,根据各个接触冰网格产生的破冰阻力对第i迭代冰层结构迭代得到第i+1迭代冰层结构,包括:
确定每个接触冰网格产生的破冰阻力在随船固连坐标系统中的垂荡方向的分量;
将垂荡方向的分量达到层冰承载极限的接触冰网格从第i迭代冰层结构中删除得到第i+1迭代冰层结构,若所有接触冰网格的垂荡方向的分量均未达到层冰承载极限则直接将第i迭代冰层结构作为第i+1迭代冰层结构,层冰承载极限为
其进一步的技术方案为,接触冰网格产生的垂直于接触面且指向极地船舶内部的挤压力为:
F
接触冰网格产生的作用于极地船舶的摩擦力包括:
其中,接触面的平均压应力
本发明的有益技术效果是:
本申请公开了一种极地船舶破冰能力动态评估方法,该方法基于连续破冰物理机理,将连续破冰视为接触-挤压-破碎的循环过程,对冰层采用新型的方形网格离散技术,在时域内动态求解船舶六自由度运动微分方程,建立考虑运动与阻力耦合效应的连续破冰数学模型,该方法兼顾船体运动和受力的耦合效应,通过建立船体六自由度运动方程进行时域动态评估,在每个时间步内迭代求解船舶六自由度运动方程,当破冰过程趋于稳定,此时净推力与冰阻力达到动态平衡即可获得该冰厚下的稳定航速,改变冰层厚度,采用相同的思路即可获得完整的h-v曲线以评估极地船舶破冰能力,这是一种动态的评估方法,无需进行冰水池模型试验,而且相比于静态评估方法来说,具有更高的可靠性和稳定性,经与模型试验验证,评估结果具有一定的精度,满足工程应用需求。
该方法巧妙的对冰层进行方形冰网格离散、对船体水线附近线型采用分层离散,建立船-冰相互作用三维数学模型,在时域内数值求解连续破冰进程中船舶运动微分方程,实时模拟船体与冰网格接触、冰网格挤压、冰网格弯曲失效直至脱离冰层的非线性迭代过程,可以实现对船舶连续破冰繁杂性、随机性及周期性的精确模拟。既能通过合理的假设建立方形网格与真实碎冰形状的关联性,又能有利于数值算法的实施,大幅提高连续破冰阻力数值模拟的效率。
附图说明
图1是本申请公开的极地船舶破冰能力动态评估方法的方法流程图。
图2是本申请在一个时间步长内构建船舶运动微分方程的方法流程图。
图3是本申请中对船体水线的离散示意图。
图4是船舶水线面上的受力和速度分解示意图。
图5是船舶正剖面上的受力和速度分解示意图。
图6是船舶与冰网格挤压时的接触面三维示意图。
图7是船舶与冰网格挤压过程不同阶段的侧面示意图。
图8是在时域内求解极地船舶在连续破冰过程的各个时间步长内的船舶运动微分方程得到的航速-时间曲线图。
具体实施方式
下面结合附图对本发明的具体实施方式做进一步说明。
本申请公开了一种极地船舶破冰能力动态评估方法,请参考图1和图2所示的流程图,该方法包括如下步骤:
一、船体数值的离散。
首先是船体数值的离散,极地船舶在连续破冰过程中船与冰层接触,以及冰层破碎之前对极地船舶的作用区域主要集中于船体水线附近,因此本申请对船舶的水线WL进行节点离散为若干个线段,如图3所示的示意图,每相邻两个节点之间的线段在极地船舶长度方向上的投影距离ΔL相等。而为了方便获取在后续数值模拟过程中所需的船舶的各类倾角,本申请除了对水线WL进行节点离散之外,还对极地船舶水线上方预定位置的第一辅助水线WL1以及水线下方预定位置的第二辅助水线WL2按照水线的节点离散方式进行同样方式的节点离散,然后对水线WL、第一辅助水线WL1和第二辅助水线WL2上相应的节点进行计算即可以确定极地船舶的倾角,本申请中主要使用到的极地船舶的倾角有极地船舶的艏部倾角
二、对连续破冰过程的时序离散。
连续破冰时迭代反复的过程,因此本申请将极地船舶对预定冰厚的冰层所进行的连续破冰过程离散为若干个在时序上连续等时长的时间步长,以起始值为0的时间步长参数k进行记录,依次分别记为第0个时间步长、第1时间步长、第2时间步长……,在每个时间步长内建立六自由度的船舶运动微分方程,在每个时间步长内的方程建立过程都是类似的,本申请对任意第k个时间步长建立方程的步骤介绍如下,包括如下步骤:
步骤S1,根据极地船舶在第k个时间步长内受到的第i迭代载荷
若k≥1,则船舶在第k个时间步长内受到的初始的第0迭代载荷
步骤S2,基于第i+1迭代航速
极地船舶在冰区的净推力可以表达为F
故而,本申请利用第i+1迭代航速
在本申请中,由于最终要构建船舶运动微分方程,而本申请中的船舶运动微分方程为六自由度运动方程,因此最终需要获取的是迭代载荷在纵荡、横荡、垂荡、横摇、纵摇和艏摇六个方向的分量,本申请的做法是,将螺旋桨净推力F
其中,F
在本申请中较为特别的是,通过上述合并分解得到的极地船舶纵荡方向的分量X
步骤S3,对冰层在第k个时间步长内的第i迭代冰层结构进行方形网格离散为若干个尺寸相同的正方形的冰网格。本申请除了对船体数值进行离散之外,还对冰层数值进行离散,在本申请中,定义冰层厚度相等均为h
基于第i+1迭代位置
船舶连续破冰过程主要包含三个阶段:首先,船舶与冰层接触并在冰层上产生垂直于接触面的作用力,该作用力导致层冰弯曲和发生垂向偏移。作用力持续增加直至冰层发生弯曲破坏并产生破碎尖冰。当碎冰块从冰层脱离,将会继续向下运动。碎冰块会同时发生旋转和加速,直至平行与船体表面。最终,碎冰块会沿着船体滑行直至离开船体。因此基于上述连续破冰进程,船舶受到的总的冰阻力F
1、破冰阻力F
其中,破冰阻力包括冰层中与极地船舶发生接触的接触冰网格产生的作用于极地船舶的挤压力和摩擦力,挤压力是接触冰网格产生的垂直于接触面且指向船舶内部的力,计算方法如下:
(1)根据第i+1迭代位置
(2)根据第i+1迭代水线位置和离散后的第i迭代冰层结构确定冰层中与极地船舶发生接触的接触冰网格及其与极地船舶的接触面积。
根据第i+1迭代水线位置和离散后的第i迭代冰层结构确定冰层中与船舶发生接触的接触冰网格。本申请基于Polygon-Point算法来判断识别冰网格与船舶的接触,Polygon-Point算法基于“射线投影方法”,是一种简单的可以辨别一个点是位于一个简单多边形的内侧还是外侧的方法。射线投影方法基于简单的观测,如果一个点从探测点沿着射线移至无限远点,若该点通过多边形的边界次数为奇数,则可认为该点位于多边形内部。在接触识别过程中,极地船舶的第i+1迭代水线位置被首先当作简单多边形,离散后的冰网格的顶点被当作分散探测点,所有探测点都将被识别是否位于多边形内部,从而可以判断各个冰网格是否位于船舶的第i+1迭代水线位置内部,若在内部则可以确定冰网格与船舶发生接触,本申请将这一类冰网格称为接触冰网格;若在外部则确定冰网格与船舶不接触。
船舶与宏观的冰层以及离散的每个冰网格之间总是形成接触-挤压-破碎的过程,当船舶接触冰网格时,冰网格在接触点开始发生挤压,挤压不断持续直至冰网格弯曲破碎,而在挤压过程中,船舶与冰网格的接触面积不断增大,因此在确定出冰层中的接触冰网格之后,还需要进一步确定各个接触冰网格与船舶的接触面积。对于正方形结构的接触冰网格来说,船舶通常从接触冰网格的上表面的顶点位置开始接触,船舶与接触冰网格之间的最大穿透距离L
在上述公式中,
(3)基于每个接触冰网格的接触面积计算得到接触冰网格产生的垂直于接触面且指向极地船舶内部的挤压力F
(4)基于每个接触冰网格产生的挤压力以及第i+1迭代航速计算得到接触冰网格产生的作用于极地船舶的摩擦力。除了挤压力,当冰层沿着船体滑行,与船体和冰层相对速度有关的摩擦阻力也应该被考虑,摩擦力被假设为与挤压力成正比,由两部分组成第一部分位于水平面,第二部分位于垂直面,也即本申请所计算的摩擦力包括接触冰网格产生的作用于船舶的水平面摩擦力f
其中,μ为摩擦系数,F
(5)将每个接触冰网格产生的挤压力和摩擦力投影到随船固连坐标系统中得到接触冰网格产生的作用于极地船舶的破冰阻力。与螺旋桨净推力F
其中,X
另外,在该步骤中,还会根据各个接触冰网格产生的破冰阻力对第i迭代冰层结构迭代得到第i+1迭代冰层结构,从而更新冰缘形状,主要是利用到了破冰阻力在随船固连坐标系统中的垂荡方向的分量Z
在本申请中,由于将冰层离散为正方形结构,因此冰层发生弯曲破碎后碎冰形状即为正方形,且认为一旦冰层发生完全破坏,船体附近的冰网格立即脱离冰层,在数值模拟中反应为将对应的冰网格直接删除。所以在对第i迭代冰层结构迭代得到第i+1迭代冰层结构时,做法如下:首先确定每个接触冰网格产生的破冰阻力在垂荡方向的分量Z
将垂荡方向的分量达到层冰承载极限的接触冰网格从所述第i迭代冰层结构中删除得到所述第i+1迭代冰层结构,若所有接触冰网格的垂荡方向的分量均未达到所述层冰承载极限则直接将所述第i迭代冰层结构作为第i+1迭代冰层结构。其中,层冰承载极限P
2、浸没冰阻力F
当冰层在船舶艏部发生挤压或弯曲破坏后产生的碎冰会浸没在水里并沿着水线以下船体滑移,该过程会产生冰浮力和除冰力,本申请将冰浮力和除冰力统称为浸没冰阻力F
其中,ρ
步骤S4,由冰阻力F
其中,X
Y
其中,积分沿着船长方向进行,C
步骤S4,若基于第i迭代载荷
若基于第i迭代载荷
若基于第i迭代载荷
通过上述步骤即可完成极地船舶在第k个时间步长内的船舶运动微分方程的构建,然后令k=k+1,再次重复执行上述步骤构建船舶在第k+1个时间步长内的船舶运动微分方程。同时,将极地船舶在第k个时间步长内的迭代过程中最终确定得到的第i+1迭代载荷
在依次获取各个时间步长内的船舶运动微分方程后,在时域内应用逐步积分法求解极地船舶在连续破冰过程的各个时间步长内的船舶运动微分方程得到船舶的极地船舶当前预定冰厚下的稳定航速。在实际进行逐步积分法求解时,得到的是极地船舶的航速随着时间的变化曲线,如图8所示,可以将极地船舶的航速的变化范围小于设定值的航速作为其稳定航速,或者,由于极地船舶的航速会逐渐趋向于稳定,因此可以达到设定阈值的时间步长内的船舶运动微分方程求解得到的航速作为稳定航速,比如在图中将靠近70s处的时间步长内求解得到的航速作为稳定航速。本发明采用Newmark方法进行数值求解。
由此通过上述方法可以获取到极地船舶在对某个预定冰厚的冰层进行连续破冰过程时的稳定航速,改变预定冰厚并重新执行上述方法得到对应的稳定航速,由此可以得到若干组预定冰厚-稳定航速的对应关系,然后根据不同预定冰厚对应的稳定航速拟合得到用于评估所述极地船舶破冰能力的冰厚-航速曲线,也即h-v曲线。
以上所述的仅是本申请的优选实施方式,本发明不限于以上实施例。可以理解,本领域技术人员在不脱离本发明的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本发明的保护范围之内。
- 一种极地船舶破冰能力动态评估方法
- 自适应船舶破冰能力的极地冰区航线设计系统及方法