一种智能检表机器人系统及其工作方法
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及机器人技术领域,尤其涉及一种智能检表机器人系统及其工作方法。
背景技术
传统变电站的巡检工作主要都是由工作人员完成的,巡视人员对业务的熟悉程度、工作经验多少、责任心强弱和精神状态好坏等主观因素直接影响到了巡检工作质量的好坏。除此之外,天气情况、记录方式等客观因素的影响也会对巡检工作造成影响,使工作中常常发生漏检、误检等现象。根据中国电力科学院2015年电网运行统计报告,由于设备的漏检和误检造成的经济损失达到每年50亿元以上。同时,变电站环境中的高辐射环境还会对工作人员的身体健康造成很大的危害。人工录入数据,是一件非常繁重的事情,数据不便于录入数据库,无法方便进行信息化管理。由此可见,传统的变电站巡检方式在一定程度上已经很难满足人们对用电量和供电质量的要求,设计机器人技术用于变电站巡检工作将是未来变电站巡检方式的发展趋势。
发明内容
随着科技进步和电力体制改革的不断深入发展,电力系统自动化程度已有很大提高,变电站值班也逐渐趋于无人化或少人化。为了保证变电站设备的安全可靠运行,更快地推进变电站无人值守的进程,本发明利用智能移动机器人完成电站设备的巡检,就目前的技术而言,可以说是提高工作效率和质量、减员增效的理想方案之一。
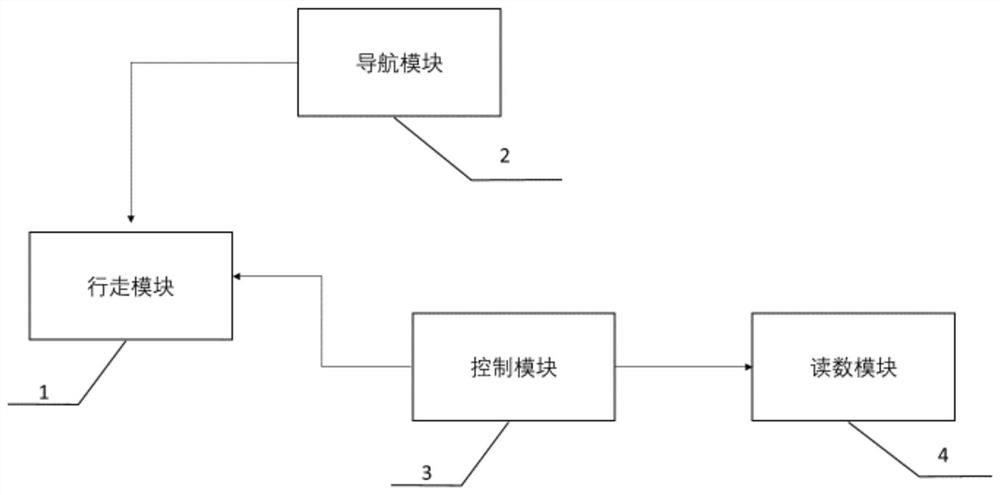
一种智能检表机器人系统,包括行走模块、电磁导航线及导航模块、摄像头及控制运算模块和读数模块,所述行走模块分别与电磁导航线及导航模块、摄像头及控制运算模块连接,所述摄像头及控制运算模块与读数模块连接,以使机器人根据电磁导航线在行走模块的驱动电路下到达预设点,通过控制运算模块控制读数模块调整摄像头,获取图像并分析,最终得出读数。
进一步地,所述行走模块还包括用于控制驱动电路的芯片。
进一步地,所述电磁导航线及导航模块包括用于机器人行走的电磁导航线,以及装设在机器人运动机构上的电磁导航模块,通过电磁导航模块获取路径信息,以实现机器人在电磁导航线13。
进一步地,在所述电磁导航线上分布有相同数量能够较好地观察各个仪表的位点,在所述电磁导航线的位点放置磁标,以使机器人运行到磁标处停止行走,在获取该磁标对应仪表读数后继续行走。
进一步地,所述摄像头及控制运算模块包括机器人摄像头和控制运算模块,所述机器人摄像头拍下照片,对照片进行目标检测和图像分析后,得出对应仪表的指针角度,所述控制运算模块通过所述指针角度控制高速马达的运行及速度的精确控制。
进一步地,所述系统还包括上位机,所述读数模块与上位机连接,以获取图像的通信系统。
进一步地,所述行走模块的驱动电路为全桥(H桥)驱动电路。
进一步地,所述电磁导航线采用单根铜导线制作。
进一步地,所述磁标为一组十字磁铁阵列,分别置于电磁导航线两侧。
一种智能检表机器人系统的工作方法,包括如下步骤:
(1)机器人从起点开始行走后,记录经过磁标的个数,建立磁标序数和该磁标出能够最佳观察相应仪表时的拍摄角度及拍摄焦距的数据库;
(2)到达磁标处停止时,根据磁标的序数匹配已存储的机器人摄像头的拍摄角度及焦距,摄像头拍下照片,对照片进行目标检测和图像分析后,得出对应仪表的指针角度;
(3)建立磁标序数、指针角度、仪表读数和仪表种类的对应数据库,以根据磁标序数匹配仪表种类,以根据指针角度和仪表种类获得仪表读数。
与相关技术相比较,本发明提供的智能检表机器人系统具有如下有益效果:
在车体停止后,开始启动图像获取功能。依据磁标序数从数据库中匹配得出两个舵机的旋转角度以及摄像头的焦距信息,将摄像头调整到预设的拍摄角度和拍摄焦距。拍摄图片,利用目标检测技术获得目标仪表在视野中的坐标,利用该坐标与视野中心的差值作为控制云台舵机的输入信号,利用PD舵机控制,调节摄像头,使目标仪表到达视野中央,根据目标仪表占视野的面积来调整摄像头的焦距,缓慢增加镜头的焦距,当目标仪表占据视野面积大于3/4时,摄像头停止变焦,获取最后一张仪表图片,并根据目标仪表的选框截取仪表图片进行自动读数;因此本发明利用智能移动机器人完成电站设备的巡检,就目前的技术而言,可以说是提高工作效率和质量、减员增效的理想方案之一。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
图1是本发明的原理结构框图;
图2(1-2)是图1中本发明的行走模块驱动电路图;
图3是电磁导航铺设示意图;
图4是电磁导航模块中电感阵列图;
图5是电磁导航模块中干簧管阵列及接线方式。
附图标记:1-行走模块;2-导航模块;3-控制模块;4-读数模块;5-输入端下拉电阻;6-驱动器滤波电容;7-负载电阻;8-滤波电容;9-隔离稳定电阻,10-BTN898芯片;11-选通电容;12-电机;13-电磁导航线;14-磁标;15-指针式仪表;16-电感;17-干簧管。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为了说明本发明所述的技术方案,下面通过具体实施例来进行说明。
如图1-5所示,一种智能检表机器人系统,包括行走模块1、电磁导航线及导航模块、摄像头及控制运算模块和读数模块4,所述行走模块1分别与电磁导航线及导航模块、摄像头及控制运算模块连接,所述摄像头及控制运算模块与读数模块4连接,以使机器人根据电磁导航线13在行走模块1的驱动电路下到达预设点,通过控制运算模块控制读数模块调整摄像头,获取图像并分析,最终得出读数;所述行走模块1还包括用于控制驱动电路的芯片;所述电磁导航线及导航模块包括用于机器人行走的电磁导航线13,以及装设在机器人运动机构上的电磁导航模块2,通过电磁导航模块2获取路径信息,以实现机器人在电磁导航线13;在所述电磁导航线13上分布有相同数量能够较好地观察各个仪表的位点,在所述电磁导航线13的位点放置磁标14,以使机器人运行到磁标14 处停止行走,在获取该磁标14对应仪表读数后继续行走;所述摄像头及控制运算模块包括机器人摄像头和控制运算模块3,所述机器人摄像头拍下照片,对照片进行目标检测和图像分析后,得出对应仪表的指针角度,所述控制运算模块3 通过所述指针角度控制高速马达的运行及速度的精确控制;所述系统还包括上位机,所述读数模块4与上位机连接,以获取图像的通信系统。具体地,如图1 所示,所述行走模块1分别与导航模块2、控制运算模块3连接,所述控制运算模块3与读数模块4连接。
在一些实施例中,如图2-3所示,行走模块1的驱动电路分为半桥驱动和全桥(H桥)驱动电路。半桥驱动电路只能控制电机12单向转动,灵活性差,故采用H桥双电机驱动电路。H桥驱动电路能够控制通过电机电流的大小和方向,可以调节电机的转动方向和转动速度,灵活性更强。Q1,Q2,Q3,Q4为控制各开关元件的控制信号。当Q1,Q4接通,Q2,Q3断开时,流经电机M的电流方向向右,电机顺转;当Q1,Q4断开,Q2,Q3接通时,流经电机M的电流方向向左,电机逆转。由此可以看出H桥电机驱动电路能够控制电机的转向。 BTN8982芯片10是用于电机驱动应用的集成大电流半桥,两个BTN8982可以组成一个完整的H桥电机驱动电路,该芯片适用于高频PWM控制,适用于直流电机的速度控制;具有过热和过流检测,能够较好地保护电路和电机;最高运行电压为40V,对工作中出现的电压过冲有一定抵抗能力。
行走模块控制芯片MK60DN512Z一款32位微控制器,其工作频率为 100MHz,是该芯片的最小系统版。该芯片有两个具有可配置分辨率的高速16 位模数转换器(ADC),能够将电磁传感器产生的模拟信号转变为易于处理的数字信号,从而让控制器获取电磁线路径信息,为自动行走提供基础;这两个 AD转换模块可以使用寄存器进行数位和采样频率设置,其最小采样周期为0.73us,完全能够胜任大于200kHz的AD采样频率。该芯片具有3个FlexTimer,共有12个通道,能够对编码器发送的方波脉冲进行正交解码,获取编码器的转动信息,也能生成用于控制电机转速和舵机转向的PWM信号;该芯片工作电压为3.3V,在使用时应当为芯片提供合适且稳定的电压。
电磁导航线13采用单根铜导线,导线直径为0.5mm,电磁线中传输频率为 20kHz、100mA的正弦波信号在电磁线中通入交流电流,因此电磁线周围的磁场会随电流的变化而变化,当电流方向发生变化时,磁场方向也会随之变化。因此导线周围的磁场将会以交流电流最大值对应的磁感应强度按照正弦规律变化,为了使机器人能够更好地工作,电磁线按照以下要求进行铺设:(1)路径平直,路面起伏小;(2)弯道平滑,转弯半径大于等于50cm;(3)靠近仪表,便于拍摄清晰的仪表照片;(4)能够分散仪表的最佳拍摄位点。
本发明为了更好规划电磁导航,根据电感可以感受磁场的变化,配合一定的电容,形成LC谐振电路,能够更好地感应空间中相应频率的磁场变化,从而消除周围环境中其他频率交变磁场的影响,为获取电磁导航线发出的电磁信号,需要使用LC谐振电路来进行传感。利用整流滤波电路对放大电路产生的交流信号进行处理,转化为能够反应交流信号幅值大小的直流信号,再利用单片机内部的AD转换模块形成数字信号,能够方便地获得电感到电磁线的相对距离。倍压整流电路,此电路相较二极管整流桥电路结构更加简单,而且有输出电压为输入电压幅值两倍的效果。图中所示状态是交流信号为负半周期的状态,二级管D1导通,二极管D2截止,输入信号只给电容C1充电,充电达到输入信号的幅值Vm后基本保持不变;当输入信号转为正半周期时,二级管D1 截止,二极管D2导通,输入信号和电容C1极性同向串联,一同给电容C2充电,充电达到输入信号幅值与电容C1两端电压之和(即2Vm)后基本保持不变。电路稳定工作后电容C2两端电压始终保持上正下负,输出较稳定的直流信号,其幅值为2Vm。
磁标14是一组十字磁铁阵列16,置于电磁线两侧,为机器人提供定位识别。磁铁采用直径为1cm的圆形磁铁片,表面磁场强度0.3~0.5特斯拉,按照十字排列,间距为1cm,阵列的长和宽均为17cm。磁标14放置位置处尽可能使电磁线按照直线铺设,并且保证该位置的地面平整。由于磁标较小,在机器人到达磁标处后再开始减速不易马上停止,对此在磁标沿电磁线行进方向上游1m 处,放置一个3~5个小磁铁,在机器人感应到小磁铁后随即进入减速状态,以确保机器人能够准确地停在磁标处。一种能够检测磁场的器件,在其内部有两个导磁性材料制作的常开触片,触片之间间距很小,当干簧管处于磁场中时,两个触片感应出不同的磁性,受磁力影响,两个触片吸合在一起,使电路导通。使用干簧管组成9×9阵列,干簧管同向排列,其中心间距为2cm,采用矩阵键盘式接线,占用较少控制芯片的输入输出引脚,只需要18个输入输出引脚即可获取这81个干簧管的通断信息。
本机器人系统的运动包括方向控制和速度控制两部分,机器人利用电磁传感器获得电磁导航线13的位置,然后控制转向舵机调整运行方向,以保证机器人沿电磁线行走。利用电磁传感器和控制芯片的AD转换模块获得电感阵列16 中各电感的感应电动势的相对大小,依据各电感的感应电动势差异判断车体与电磁线之间的位置信息。将电磁线与电感阵列中心电感的相对位差作为控制舵机转角的输入信号,形成方向的闭环控制。机器人的速度利用编码器获取,将编码器的转轴和电机的转轴利用齿轮连接起来,当电机转动时,编码器就会输出表示转动量的方波,在单片机中设置定时中断,将一定时间内的脉冲数除以该段时间就可以获得电机12的转速大小,从而构成闭环控制。
在图4中,不同距离的电感16产生的感应电动势大小是不同的,根据这种差异,能够很容易地获得电感阵列中的各个电感到电磁线的相对距离大小。将电感按照图示方式排列,当电感阵列中心处于电磁线上时,电感分布在电磁导航线13两侧,中部电感的感应电动势大于边缘电感的感应电动势。依此可以根据电感阵列各电感的感应电动势大小来判断电磁线与电感阵列之间的相对位置。
在一些实施例中,电磁导航模块2注意安装的方向为:直导线周围的磁场方向遵循右手定则,以导线为中心,呈圆形分布;
在一些实施例中,电磁线中的电流频率为20kHz,因此应当使用大于200kHz 的AD转换频率。
在一些实施例中,利用PWM控制。当脉冲的高电平占空比变大时,单位时间内电机中接收到的能量就会增多,导致电机转速增加,控制电机的PWM信号的频率为10kHz。
在一些实施例中,车体转向利用转向舵机扭动动车体前轮实现,舵机的转角利用特殊格式的PWM信号进行控制,采用型号为Futaba S3010,高电平为 1.5ms时舵机处于中间位置,小于1.5ms舵机向左转动,大于1.5ms舵机向右转动。
在本实施例中,读数模块3是传到计算机进行处理,VS平台处理图像,控制模块3就是芯片控制:MK60DN512Z一款32位微控制器,其工作频率为 100MHz,是该芯片的最小系统版。该芯片有两个具有可配置分辨率的高速16 位模数转换器(ADC),能够将电磁传感器产生的模拟信号转变为易于处理的数字信号,从而让控制器获取电磁线路径信息,为自动行走提供基础。
根据该系统读数模块,其原理为:在车体停止后,开始启动图像获取功能。依据磁标序数从数据库中匹配得出两个舵机的旋转角度以及摄像头的焦距信息,将摄像头调整到预设的拍摄角度和拍摄焦距。拍摄图片,利用目标检测技术获得目标仪表在视野中的坐标,利用该坐标与视野中心的差值作为控制云台舵机的输入信号,利用PD舵机控制,调节摄像头,使目标仪表到达视野中央,根据目标仪表占视野的面积来调整摄像头的焦距,缓慢增加镜头的焦距,当目标仪表占据视野面积大于3/4时,摄像头停止变焦,获取最后一张仪表图片,并根据目标仪表的选框截取仪表图片进行自动读数。
一种智能检表机器人系统的工作方法,包括如下步骤:
(1)机器人从起点开始行走后,记录经过磁标的个数,建立磁标序数和该磁标出能够最佳观察相应仪表时的拍摄角度及拍摄焦距的数据库;
(2)到达磁标处停止时,根据磁标的序数匹配已存储的机器人摄像头的拍摄角度及焦距,摄像头拍下照片,对照片进行目标检测和图像分析后,得出对应仪表的指针角度;
(3)建立磁标序数、指针角度、仪表读数和仪表种类的对应数据库,以根据磁标序数匹配仪表种类,以根据指针角度和仪表种类获得仪表读数。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种智能检表机器人系统及其工作方法
- 一种全局定位系统、具有该全局定位系统的智能扫地机器人及其工作方法