踏步探路导盲器
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及助残、探路设备领域,尤其是涉及踏步探路导盲设备。
背景技术
对于视障人士来说,在他们熟悉的环境之外,如果没有人或导盲犬的帮助,将寸步难行。如何感知前方路况,从而放心大胆地行走是他们的揪心事。
盲杖简易而功能不全。他们一般会使用一定的辅助设施,比如传统的盲杖、加入声波探测障碍物的电子盲杖等等,这些设备各有优缺点。据了解,绝大多数视障人士都觉得,它们的功能并不能满足自己实际活动所需,因为它们难以提供足够的信息,确保引导使用者选择正确的路径并避开障碍。
导盲犬名贵而供不应求。我国国内的导盲犬训练基地特别少,最早成立的中国导盲犬大连基地,平均每年培养出的导盲犬数量不足百只;导盲犬的平均服役年龄不到十年,而每只导盲犬的培养成本高达15-20万。据了解,目前大连导盲犬基地接受的申购量已近百万,年中签率高达万分之一。
导盲机器人昂贵而参差不齐。目前导盲机器人的发展较为迅速,导盲机器人大致可分为地面引导机器人和导盲眼镜两大类。导盲眼镜主要结合云计算、人工智能、视觉技术与语音交互等技术来实现引导视障人士避障的功能,这类导盲机器人最大的不足在于,利用语音交互技术与视障人士信息交互,在避障时,视障人士对于障碍物的距离等信息不能及时感受到,由时差引起的反应滞后极大地增加了视障人士的危险程度。北大、哈工大等大学和研究机构也先后研制了以轮式机器人为载体的导盲机器人,但受制于轮式机器人地形运动适应能力,这种导盲机器人难以引导视障人士上下台阶,更无法适应复杂的地形。
几乎所有的视障人士都希望能有一款简易而低廉的导盲设备,可以让他们在路上行走时感觉放心和安全。
发明内容
为了克服现有技术之不足,帮助视障人士解决现实问题,本发明所提供的技术方案是:
踏步探路导盲器,包括机箱、驱动系统、手柄和支撑轮,其特征在于,
所述驱动系统设置在所述机箱内部,包括输出轴;所述输出轴横向水平布置,左右两端分别从所述机箱的左右两侧外壳穿出;所述手柄前端连接所述机箱,后端为抓手端;所述支撑轮设置在所述机箱的后方;
还包括双足行走机构,所述双足行走机构包括结构相同的左侧机构和右侧机构,所述左、右侧机构互相呈镜像分别布置在所述机箱的左右两侧下方;所述左、右侧机构均包括髋部、腿部和足部,所述髋部包括曲柄;所述左、右曲柄的一端分别与所述输出轴的左、右两端固定连接;所述左、右曲柄垂直于所述输出轴的轴线,并朝相反方向布置;所述腿部包括连杆机构,所述连杆机构至少包括一根长连杆和一根摇杆;所述左右长连杆的顶端与所述左右曲柄的另一端转动连接;所述左右长连杆的中部与所述左右摇杆的底端转动连接;所述左右摇杆的顶端与所述机箱的左右两侧外壳转动连接;所述机箱的左右两侧外壳、所述左右曲柄、所述左右长连杆上段和所述左右摇杆共同组成四连杆机构;所述左右足部分别连接在所述左右长连杆的下方。
进一步的,还包括一对触角天线,所述触角天线铰接在所述机箱上方,可以向左右方向调节角度,以调整两根天线顶端之间的距离,使其等于或略宽于使用者的肩宽;所述触角天线还可以伸缩,以调节高度,使其等于或略高于使用者的身高。
优选的,所述足部包括足杆和足板,呈“L”形或倒“T”形布置,所述足杆与所述长连杆底端之间活动连接,所述足杆伸出的长度可以调整,以便调节所述双足行走机构的总长度,从而调整该设备步行的步幅。
优选的,所述手柄铰接在所述机箱后方,可以拆卸、上下调整角度或者与所述机箱相折叠;所述手柄可以调节长短,以便适应步行者的步行速度,让其感知异常后有足够的反应时间。
优选的,所述支撑轮通过支撑杆铰接在所述手柄的前段下方,可以拆卸或者与所述手柄相折叠;所述支撑杆也可以调节长短;所述支撑轮由相隔一定距离并排安装的两个轮子组成。
优选的,所述驱动系统设计成电动型,还包括电机、电机控制器、传动装置和储电装置;所述手柄的抓手端设有控制按钮或旋钮,所述控制按钮或旋钮通过所述电机控制器控制该设备步行的步频。
进一步的,还包括探测系统、感应控制系统、定位系统等电子信息设备及播音设备,可以实现智能探路、智能引导,并帮助使用者感知更多周边信息。
进一步的,还包括发电系统,所述发电系统利用所述电机反向运转实现对所述储电装置的充电。
优选的,为降低成本、扩大适用范围,所述驱动系统也可以设计成手动型,包括飞轮、传动装置、手动驱动装置和制动装置,所述手动驱动装置设置在所述手柄的抓手端;所述手动驱动装置与所述制动装置相配合,可以操控所述飞轮的转速,以控制该设备步行的步频。
进一步的,所述足部的足底及足尖设置若干发声器,以提高对路况的辨识度。
进一步的,还包括储物装置,附设在所述机箱上或所述手柄上。
与现有技术相比,本发明的有益效果为:
1.通过双足踏步来探路,既精准,又简便。采用单个驱动源和简单连杆机构模拟人类双足行走,通过在使用者迈步前提早踏实地面,及时将足部接触地面时产生的震动和声响传导出来,让人确切地感知自己下一步落脚处的具体路况,从而坚定向前迈步的信心。
2.通过实物和触觉传感来探路,既及时,又实用。通过可调高度和宽度的触角天线,可以探知即将到达的前方空间之虚实,以防止碰头或撞伤身体,从而引导人们大胆前行;特别适用于导盲或在黑夜、地道等光线不足的时空中用于探路。
3.功能较齐全,既能感知普通路况,又能探知特殊路障。可以将手柄当作杠杆,以所述支撑轮为支点,让所述双足行走机构腾空运行,通过左右上下前推试探,得以探知路面的高低虚实,从而引导人们上下楼梯和台阶、跨越或绕过路障、上下坡、越过沟坎。
4.适用面较广,既有电动型,又有手动型。并且可以根据使用者的步行习惯调整步幅,根据实际需要控制步频,以适应使用者的步行速度。
附图说明
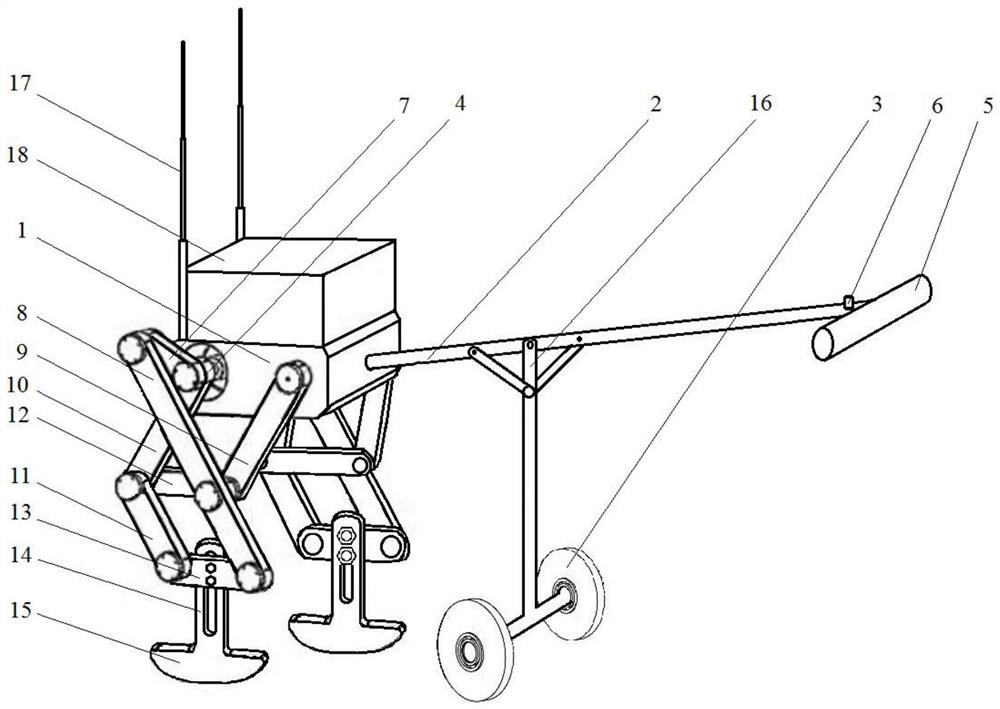
图1是本发明一个实施例的结构示意图;
图中标号含义:
1.机箱,2.手柄,3.支撑轮,4.输出轴,5.抓手端,6.控制按钮,7.曲柄,8.长连杆,9.摇杆,10.辅助摇杆,11.短连杆,12.上横杆,13.下横杆,14.足杆,15.足板,16.支撑杆,17.触角天线,18.储物装置。
具体实施方式
下面结合附图对本发明作进一步说明。附图为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
实施例之一:
如图所示,踏步探路导盲器,包括机箱1、驱动系统、手柄2和支撑轮3,其特征在于,
所述驱动系统设置在所述机箱1内部,包括输出轴4、电机、电机控制器、传动装置和储电装置;所述输出轴4横向水平布置,左右两端分别从所述机箱1的左右两侧外壳前部穿出;所述手柄2前端铰接所述机箱1,后端为抓手端5;所述抓手端5设有控制按钮6,所述控制按钮6通过所述电机控制器控制该设备步行的步频。
还包括双足行走机构,所述双足行走机构包括结构相同的左侧机构和右侧机构,所述左、右侧机构互相呈镜像分别布置在所述机箱1的左右两侧下方;所述左、右侧机构均包括髋部、腿部和足部,所述髋部包括曲柄7;所述左、右曲柄7的一端分别与所述输出轴4的左、右两端固定连接;所述左、右曲柄7垂直于所述输出轴4的轴线,并朝相反方向布置;
所述腿部包括连杆机构,所述连杆机构包括长连杆8、摇杆9、辅助摇杆10、短连杆11、上横杆12、下横杆13;所述长连杆8的顶端与所述曲柄7的另一端转动连接;所述长连杆8的中部与所述摇杆9的底端转动连接;所述摇杆9的顶端与所述机箱1的侧面外壳后部转动连接;所述辅助摇杆10的顶端与所述输出轴4转动连接,且位于所述曲柄7和所述机箱1的侧面外壳之间;所述辅助摇杆10的底端同时与所述短连杆11的顶端,以及所述上横杆12的前端通过转动副相联接;所述上横杆12的后端同时与所述摇杆9的底端,以及所述长连杆8的中部通过转动副相联接;所述短连杆11的底端与所述下横杆13的前端转动连接;所述下横杆13的后端与所述长连杆8的底端转动连接;所述摇杆9与所述辅助摇杆10等长,且两者的顶端位于所述机箱1侧面外壳的同一水平高度;所述短连杆11与所述长连杆8相平行,且所述长连杆8中部与所述摇杆9底端的连接处到所述长连杆8底端的长度,与所述短连杆11的长度等长;所述上横杆12与所述下横杆13等长;所述机箱1的侧面外壳、所述曲柄7、所述长连杆8上段和所述摇杆9共同组成曲柄摇杆机构;所述短连杆11、所述长连杆8下段、所述上横杆12和所述下横杆13共同组成平行四边形连杆机构;
所述足部包括足杆14和足板15,呈“L”形或倒“T”形布置,所述足杆14与所述下横杆13的中部活动连接,可以调整所述足杆14伸出的长度,以调节所述双足行走机构的总长度(即该设备的腿长),从而调整该设备步行的步幅。
所述支撑轮3通过支撑杆16铰接在所述手柄2的前段下方,可以拆卸或者与所述手柄2相折叠;所述支撑杆16可以调节长短;所述支撑轮3由一对并排安装的轮子组成,两轮之间的宽度不大于所述双足行走机构左、右侧机构之间的宽度。
进一步的,还包括一对触角天线17,所述触角天线17铰接在所述机箱1上方,可以向左右方向调节角度,以调整两根天线顶端之间的距离,使其等于或略宽于使用者的肩宽;所述触角天线17还可以伸缩,以调节高度,使其等于或略高于使用者的身高。
优选的,所述手柄2铰接在所述机箱1后方,可以拆卸、上下调整角度或者与所述机箱1相折叠;所述手柄2可以调节长短,以便适应步行者的步行速度,让其感知异常后有足够的反应时间;
优选的,所述驱动系统设计成电动型,还包括电机、电机控制器、传动装置和储电装置;所述手柄2的抓手端5设有控制按钮6,所述控制按钮6通过所述电机控制器控制该设备步行的步频。
进一步的,还包括探测系统、感应控制系统、定位系统等电子信息设备及播音设备,可以实现智能探路、智能引导,并帮助使用者感知更多周边信息。
进一步的,还包括发电系统,所述发电系统利用所述电机反向运转实现对所述储电装置的充电。
优选的,为降低成本、扩大适用范围,所述驱动系统也可以设计成手动型,包括飞轮、传动装置、手动驱动装置和制动装置,所述手动驱动装置设置在所述手柄2的抓手端5;所述手动驱动装置与所述制动装置相配合,可以操控所述飞轮的转速,以控制该设备步行的步频。
进一步的,所述足板15的底面前后向设计成弧面,弧面上设置若干发声器,以提高对路况的辨识度。
进一步的,还包括储物装置18,附设在所述机箱1上或所述手柄2上。
下面结合附图来阐述本发明探路功能的实现过程:
利用简单机构模拟人类双足行走,在使用者迈步前代替人足提早踏实地面,并将接触地面时产生的震动和声响传导出来,让使用者精准地探知自己即将迈出的下一步落脚处的具体路况,从而有信心大胆地向前迈步。
当遇到楼梯、台阶、路障、坡面、沟坎时,可以将手柄2当作杠杆、以所述支撑轮3为支点,通过下压所述手柄2的抓手端5,将所述机箱1悬起来,让所述双足行走机构腾空运行,同时推向前方并左右上下试探,以探知路面的高低虚实,再让其着地后接续步行,从而引导人们上下楼梯台阶、跨越或绕过路障、爬坡过坎。
以上述依据本发明的实施例为启示,通过上述说明,工作人员可在不偏离本项发明技术思想的范围内,进行各种变更和修改,均在本发明的保护范围内。本项发明的技术性范围并不局限于说明书上的内容,必须根据权利要求范围来确定其技术性范围。
- 踏步探路导盲器
- 踏步探路导盲器