缝纫机
文献发布时间:2023-06-19 11:55:48
背景
以下描述涉及缝纫机,并且更具体地涉及具有完全可旋转的缝纫头的缝纫机。
当前,可以经由手动或自动缝合方法将装饰性活动针迹应用于预成形的汽车部件。通常在具有相对线性针迹路径的较小部件上使用手动针迹。随着零件尺寸、重量和针迹路径复杂性的增加,操作员在固定缝纫机下手动铰接预成形零件变得更加困难,因此自动化变得更加实用。使用六轴机器人的自动单元通常与缝纫机一起用作末端执行器。缝纫机被设计为在机器人的运动范围内进入零件的所需区域。
随着将活动缝合应用于预成形汽车部件的趋势不断普及,所需缝合的位置和类型也在不断发展。随着所需的针迹路径的长度增加和/或覆盖成形零件表面的较大部分,需要缝纫头围绕零件外部进行额外的运动。然而,在固定零件时,使缝纫头围绕零件外部运动可能会带来问题,而且运动通常也会超出机器人的运动范围。此外,汽车制造商通常更喜欢独特的针迹类型、样式和线尺寸,而传统的缝纫系统不容易提供这些针迹类型、样式和线尺寸。
概述
根据本发明的一个方面,提供了一种用于将针迹缝入制品的缝纫机。所述缝纫机包括支撑结构、第一头和第二头。第一头联接到支撑结构并且包括容纳在第二致动器组件内并且相对于支撑结构可旋转360°的联接器,和可与联接器一起旋转并且可经由第一致动器组件相对于联接器平移的第一缝合元件。第二头联接到支撑结构并且包括容纳在第二致动器组件内并且相对于支撑结构可旋转360°的联接器,和经由第一致动器组件可与联接器一起旋转的第二缝合元件。
根据另外的或替代的实施方案,支撑结构包括脊柱和从脊柱延伸的第一和第二细长构件,第一和第二细长构件具有分别与第一和第二缝合元件联接的远端。
根据另外的或替代的实施方案,第一缝合元件包括针,并且第二缝合元件包括弯针。
根据另外的或替代的实施方案,第一头包括驱动第一缝合元件相对于联接器的平移和第二缝合元件的旋转的第一致动器组件和驱动第一头和第二头的旋转第二致动器组件。
根据另外的或替代的实施方案,致动组件包括电动机、延伸穿过支撑结构的机械连杆以及第一和第二联接单元,机械连杆通过该第一和第二联接单元联接到第一和第二缝合头。
根据另外的或替代的实施方案,另外的驱动组件驱动支撑结构的旋转。
根据另外的或替代的实施方案,机器人控制器配置成控制第一和第二缝合头的相应平移以及驱动组件的操作。
根据另外的或替代的实施方案,在从扫描器缝纫之前,机器人控制器在接收到反馈之前调整预定的针迹路径坐标,该扫描器扫描沿着待缝合路径的长度定位在制品上的特征的位置。
根据本发明的另一方面,提供了一种用于将针迹缝入制品的缝纫机。所述缝纫机包括各自可相对于制品、第一头和第二头运动的第一和第二头。第一头包括:联接器,所述联接器可绕延伸通过第一和第二头的轴线旋转;第一致动器元件,所述第一致动器元件与所述联接器一起旋转并在横向于所述轴线的第一和第二方向上相对于所述联接器平移;第二致动器元件,所述第二致动器元件与所述联接器一起旋转,在第一和第二方向上与所述第一致动器元件一起平移,并相对于所述第一致动器元件在第三方向上旋转;和第三致动器元件,所述第三致动器元件与所述联接器一起旋转,在第一和第二方向上与所述第一致动器元件平移,在第三方向上与所述第二致动器元件一起旋转并且相对于所述第二致动器元件沿所述轴线在第三方向上平移。第二头包括:联接器,所述联接器可绕所述轴线在所述第三方向上旋转;第一致动器元件,所述第一致动器元件与所述联接器一起旋转并且在所述第一和第二方向上相对于所述联接器平移;第二致动器元件,所述第二致动器元件与所述联接器一起旋转,与所述第一致动器元件在第一和第二方向上平移,与所述第一致动器元件在第三方向上旋转并且相对于第一致动器元件沿所述轴线在所述第三方向上平移。
根据另外的或替代的实施方案,第一头包括第一和第二缝合元件。
根据另外的或替代的实施方案,第一缝合元件包括弯针或扩张器,并且第二缝合元件包括冲头或锥子。
根据另外的或替代的实施方案,第一头包括驱动第一缝合元件相对于第一头的联接器在第一和第二方向上平移的第一致动器元件、驱动第一缝合元件相对于第一致动器元件旋转的第二致动器元件,和驱动第二缝合元件相对于第一缝合元件在第三方向上的平移的第三致动器元件。
根据另外的或替代的实施方案,控制器配置成控制和协调联接器的旋转以及第一和第二头中的每一个的缝合元件的平移和旋转。
根据另外的或替代的实施方案,控制器包括扫描器,以扫描制品上的特征的位置,并且配置成根据预定的缝合指令和特征的位置校正实际和可允许的针位置之间的偏差。
根据另外的或替代的实施方案,第一头的第一缝合元件包括弯针或撒布器,并且第一头的第二缝合元件包括冲头或锥子。
根据另外的或替代的实施方案,第二头的第一缝合元件包括针。
根据另外的或替代的实施方案,第一和第二头联接到第一和第二可独立铰接的机械臂。
根据另外的或替代的实施方案,第一和第二头联接到支撑结构。
根据另外的或替代的实施方案,支撑结构包括脊柱和从脊柱延伸的第一和第二细长构件,第一和第二细长构件具有分别与第一和第二头联接的远端。
通过结合附图的以下描述,这些以及其他优点和特征将变得更加明显。
附图简述
在说明书结尾的权利要求书中特别指出并明确要求保护被视为公开内容的主题。通过以下结合附图的详细描述,本公开的前述和其他特征和优点将变得显而易见,其中:
图1是根据实施方案的机械驱动的缝纫机的侧视图。
图2是根据实施方案的电力和机械驱动的缝纫机的侧视图。
图3是根据实施方案的电力驱动的缝纫机的侧视图;和
图4是具有根据实施方案的支撑结构的图3的缝纫机的侧视图。
通过结合附图的以下描述,这些以及其他优点和特征将变得更加明显。
详述
如下所述,缝纫机具有满足当前缝纫需求的能力。该缝纫机旨在用于自动缝合应用中并具有独立但同步的上下头旋转,从而无需始终将机体定位在垂直于缝纫路径的位置。结果,缝纫闭环针迹路径的能力得到增强,将半径较小的曲线缝入零件的较远区域的能力也得到增强。该缝纫机包括每个能够+/-360°旋转和运动的缝纫头,这些缝纫头可以被机械地、机电地或完全电力驱动。缝纫机被设计成使得缝纫头尺寸紧凑以最大程度地围绕零件操作。机器的功能能力得到增强,使得仅需对机器进行较小的重新配置就可以执行以下缝合技术:通过柔软材料进行单针或双针双线链式缝合;通过柔软材料进行单针或双针单线链式缝合;通过刚性基材进行单针或双针单线链式缝合;以及通过柔软材料进行单针多线绣花缝合。为了进一步的应用灵活性,缝纫机还可以设计成可以将缝纫头与附接到单独机器人的上下头分开。
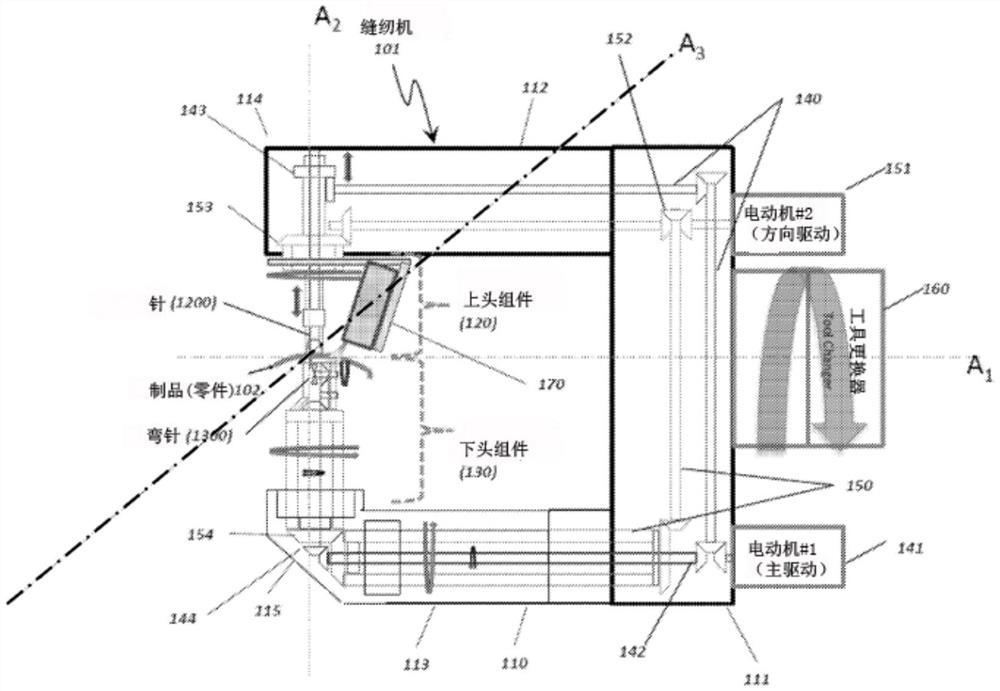
参考图1,提供了缝纫机101,并且该缝纫机101能够将各种类型的针迹缝到制品102中。缝纫机101包括支撑结构110,该支撑结构相对于制品102可运动并且可绕延伸穿过制品102的轴线A1旋转。支撑结构110可以沿前后方向(即,相对于轴线A3轴向限定的第一方向)、左右方向(即,相对于轴线A1轴向限定的第二方向)和上下方向(即,相对于轴线A2轴向限定的第三方向)运动。
根据实施方案,支撑结构110可以包括脊柱111、从脊柱111的第一端延伸的第一细长构件112和从脊柱111的第二端延伸以基本平行于第一细长构件112的第二细长构件113。第一细长构件112在其距脊柱111的远端处具有远端114,并且第二细长构件113在其距脊柱111的远端处具有远端115。
缝纫机101还包括:第一缝合头120,第一缝合头120在第一细长构件112的远端114处联接到支撑结构110;和第二缝合头130,第二缝合头130在第二细长构件113的远端115处联接到支撑结构110。第一缝合头120可以包括或提供有第一缝合元件1200。第一缝合元件1200可以包括针。第二缝合头130可以包括或提供有第二缝合元件1300。第二缝合元件1300可以包括弯针。
缝纫机101还包括第一致动组件140、第二致动组件150,在某些情况下还包括第三致动组件160。
第一致动组件140至少部分地布置在支撑结构110内并且配置成致动第一缝合头120的缝合元件1200和第二缝合头130的缝合元件1300。缝纫元件1200的致动沿轴线A2轴向发生,而缝纫元件1300的致动围绕平行于轴线A1的轴线旋转发生。第一致动组件140包括电动机141;延伸穿过支撑结构110的机械连杆142;第一联接单元143,机械连杆142通过第一联接单元143联接到第一缝合头120;和第二联接单元144,机械连杆142通过第二联接单元144联接到第二缝合头130。第二致动组件150至少部分地布置在支撑结构110内并且配置成驱动第一缝合头120和第二缝合头130中的每一个绕轴线A2的相应旋转。第二致动组件150包括电动机151;延伸穿过支撑结构110的机械连杆152;第一联接单元153,机械连杆152通过第一联接单元153联接到第一缝合头120;和第二联接单元154,机械连杆152通过第二联接单元154联接到第一缝合头120。
在可用的情况下,第三致动组件160配置成驱动支撑结构110绕第二轴线A1旋转,使得第一缝合头120可在制品102上方或下方操作,而第二缝合头130可在制品102下方或上方操作。
根据另外的实施方案,缝纫机101可以进一步包括扫描器170,该扫描器170配置成在缝合之前检测特征102在沿着针迹路径定位的制品102上的相对位置,并且向机器人控制器提供反馈,依次将在缝合前调整预定义针迹路径的坐标,从而使缝合的零件符合预定义的缝合约束。
参考图2,提供了用于将针迹缝入制品202的缝纫机201。缝纫机201包括可相对于制品202运动的支撑结构210。支撑结构210可以沿前后方向(即,相对于轴线A3线性限定的第一方向),左右方向(即,相对于轴线A1线性限定的第二方向)和上下方向(即,沿轴线A2线性定义的第三方向)运动。支撑结构210也可绕轴线A1和制品202旋转。
根据实施方案,支撑结构210可以包括脊柱211、从脊柱211的第一端延伸的第一细长构件212和从脊柱211的第二端延伸以基本平行于第一细长构件212的第二细长构件213。第一细长构件212在其距脊柱211的远端处具有远端214,并且第二细长构件213在其距脊柱211的远端处具有远端215。
缝纫机201还包括第一缝合头220、第二缝合头230和驱动组件240。第一缝合头220在第一细长构件212的远端214处联接到支撑结构210。第二缝合头230在第二细长构件213的远端215处联接到支撑结构210。第一缝合头220可以包括或提供有具有可选的第二缝合元件2201的第一缝合元件2200。第一缝合元件2200可以包括弯针或撒布器。第二缝合元件2201可以由冲头或锥子组成。第二缝合头230可以包括或提供有第三缝合元件2300。第三缝合元件2300可以包括针。
第一缝合头220包括联接器221;第一致动器元件222,第一致动器元件222可与联接器221一起绕轴线A2旋转并且可相对于联接器221在第一和第二方向上平移;第二致动器元件223;和可选的第三致动器元件224。第二致动器元件223可以沿轴线A1和A3在第一和第二方向上与第一致动器元件222平移,可相对于第一致动器元件222绕轴线A2旋转,并且也可与联接器221绕轴线A2旋转。可选的第三致动器元件224使第二缝合元件2201相对于第二致动器元件223沿轴线A2在第三方向上平移,可与第一致动器元件222平移,可与第二致动器元件223绕轴线A2旋转,并且也可与联接器221一起绕轴线A2旋转。
第二缝合体230包括:联接器231;第一致动器元件232,第一致动器元件232可与联接器231一起绕轴线A2旋转并且可相对于联接器231沿轴线A3和A1在第一和第二方向上平移;和第二致动器元件233。第二致动器元件233可以沿轴线A1和A3在第二和第一方向上与第一致动器元件232平移,可以沿轴线A2在第三方向上相对于第一致动器元件232平移并且可与联接器231沿轴线A2一起旋转。
驱动组件240至少部分地布置在支撑结构210内以驱动第一和第二缝合头220和230绕轴线A2的旋转。致动组件240包括电动机241;延伸穿过支撑结构210的机械连杆242;第一联接单元243,机械连杆242通过第一联接单元243联接到第一缝合头220;和第二联接单元244,机械连杆242通过第二联接单元244联接到第二缝合头230。
提供了另外的驱动组件270以在缝纫期间驱动支撑结构210围绕轴线A1的旋转。另外的致动组件270还用于驱动支撑结构210绕第二轴线A2旋转,使得第一缝合头220可在制品202上方或下方操作,而第二缝合头230可在制品202下方或上方操作。
根据另外的实施方案,缝纫机201可以进一步包括扫描器280,扫描器280配置成在缝合之前检测特征在沿着针迹路径定位的制品202上的相对位置,并且向机器人控制器提供反馈,依次将在缝合前调整预定义针迹路径的坐标,从而使缝合的部件符合预定义的缝合约束。
参考图3,提供了用于将针迹缝入制品302的缝纫机301。缝纫机301包括可相对于制品302运动的第一头310和可相对于制品302运动的第二头320。
第一头310包括第一致动器元件311,第一致动器元件311可绕延伸穿过制品302以及第一头310和第二头320的轴线A2旋转;第二致动器元件312;第三致动器元件314;第四致动器元件315;和第一缝合元件313,包括弯针或撒布器。第二致动器元件312与第一致动器元件311一起旋转,并且可相对于第一致动器元件311沿轴线A3和A1在第一和第二方向上方向平移。直接联接到第一缝合元件313的第三致动器元件314与第一致动器元件311一起旋转,可与第二致动器元件312平移并且相对于第二致动器元件312旋转。第四致动器元件315沿轴线A2在第三方向上平移可选的第二缝合元件3130,与第一致动器元件311一起旋转,与第二致动器元件312一起平移并且与第三致动器元件314一起旋转。
第二头320包括可绕轴线A2旋转的第一致动器元件321、第二致动器元件322和第三致动器元件323。第二致动器元件322与第一致动器元件321一起旋转且可相对于第一致动器元件321沿轴线A3和A1在第一和第二方向上平移。第三致动器元件323包括第三缝合元件3230并且与第一致动器元件321一起旋转,并与第二致动器元件322沿轴线A3和A1在第一和第二方向上一起平移且可相对于第二致动器元件322沿轴线A2在第三方向上平移。
根据另外的实施方案,缝纫机301可以进一步包括扫描器330,扫描器330配置成在缝合之前检测特征在沿着缝合路径定位的制品302上的相对位置,并且向机器人控制器提供反馈,依次将在缝合前调整预定义针迹路径的坐标,从而使缝合的部件符合预定义的缝合约束。
如图3所示,缝纫机301可以经由工具更换器340和350联接到第一和第二头310和320分别联接到的第一和第二可独立铰接的机械臂360和370。机械臂360和370可允许第一头310和第二头320相对于制品302在各种位置和姿势下操作并布置在制品302上方或下方。
参考图4,第一头310和第二头320可以联接到支撑结构360。支撑结构360可以包括脊柱361,从脊柱361的第一端延伸的第一细长构件362和从脊柱361的第二端延伸以基本平行于第一细长构件362的第二细长构件363。第一细长构件362具有远端364,第一头310在其距脊柱361的远端处联接到远端364,并且第二细长构件363具有远端365,第二头320在其距脊柱361的远端处联接到远端365。
为了将缝纫机301定位在用于缝合的最佳位置,根据需要提供了另外的驱动组件370以驱动支撑结构360绕轴线A1的旋转。机器人控制器可以配置成驱动支撑结构360围绕轴线A1的旋转,使得第一头310可以在制品302上方或下方操作,而第二头320可以在制品302下方或上方操作。
本公开的技术效果和益处是提供一种缝纫机,该缝纫机结合用于自动缝合应用的上下缝纫头,以消除在任何时候都将机体定位在垂直于缝纫路径的位置的需要,并且增强缝合半径较小的闭环针迹路径和曲线(例如在绣花时的情况)的能力。此外,缝纫机在轮廓大的零件上提供闭环链式针迹花样,这些零件没有内部特征开口(通常需要缝纫头接近),并且起始和停止位置可以完美对齐以产生多种效果部件缝合在一起。缝纫机还提供放置在轮廓大的零件上的精细且复杂的链式针迹花样;此类产品的整个周边和内部(其中产品在用于缝纫头接近的零件内部几乎不或不含有开口)周围的缝合能力;和可以编程以在产品(刺绣)上形成图像、徽标或文本的图案,需要非常紧密的方向变化和转动半径(例如,平面内转动半径或平面或小于5mm并且在某些情况下小于2mm的轮廓的零件的表面上的针迹转动半径),其中转动半径由针迹长度以及在短时间内和短距离内旋转/转动针和钩的能力决定。
尽管仅结合有限数量的实施方案详细地提供了本公开,但是应当容易理解,本公开不限于这样的公开的实施方案。而是,可以对本公开进行修改以结合迄今未描述但与本公开的精神和范围相对应的任何数量的变型、变更、替换或等同布置。另外,尽管已经描述了本公开的各种实施方案,应当理解,示例性实施方案可以仅包括所描述的示例性方面中的一些。因此,本公开不应被视为由前述描述限制,而是仅由所附权利要求的范围限制。
- 一种缝纫机机头及具有该缝纫机机头的缝纫机
- 缝纫机系统、缝纫机、终端装置、缝纫机系统中的信息显示方法