飞行体
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及具备多旋翼机机构的飞行体。
背景技术
在空中拍摄、建筑设备的调查等中,使用被称为无人机(Drone)的具备旋翼机的飞行体(参照对比文件1)。这样的飞行体具备具有多个旋转翼的多旋翼机机构。通过具备多旋翼机机构,垂直起飞着陆变得自由。因此,在空中拍摄、建筑设备的调查等中广泛普及具备旋翼机的该飞行体。
近年来,作为这样的多旋翼机机构的下一阶段的用途,期望其被适用于物流无人机、飞行出租车等的输送用途。
现有技术文献
专利文献
专利文献1日本特开2018-127215号公报
然而,在使这样的飞行体适用于输送用途中时,要求进一步提高巡航距离、巡航稳定性。
发明内容
鉴于上述情况,本发明的目的是提供一种具备多旋翼机机构的飞行体,其具备垂直起飞着陆以及水平巡航这两种功能,并且具有优异的巡航性能。
为了达成上述目的,本发明的一方式涉及的飞行体具备推进部和机身部。推进部具有沿第一方向延伸的旋转轴和设置在旋转轴的两端的推力产生机构,产生在空中飞行的推进力。机身部在旋转轴的下方悬挂在推进部,并且在与所述旋转轴相比下方的位置具有重心,构成为绕旋转轴自由旋转,并且能够容纳行李。
发明效果
如以上所述那样,根据本发明,提供一种飞行体,其具备垂直起飞着陆以及水平巡航这两种功能,并且具有优异的巡航性能。
附图说明
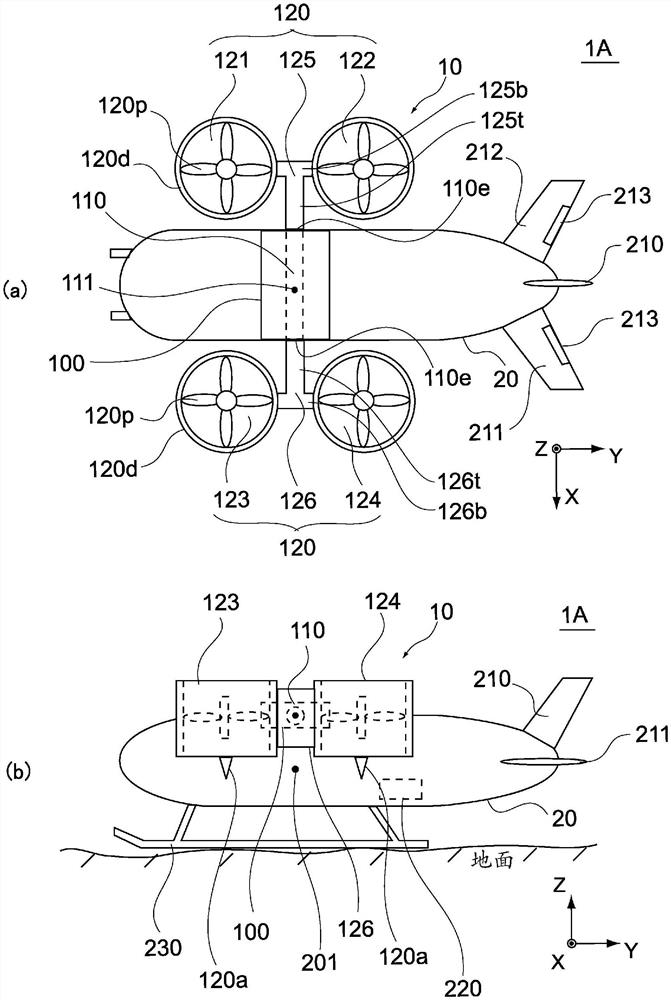
图1的图(a)是本实施方式涉及的飞行体的示意性俯视图。图1的图(b)是本实施方式涉及的飞行体的示意性侧视图。
图2的图(a)是本实施方式涉及的飞行体的示意性俯视图。图2的图(b)是本实施方式涉及的飞行体的示意性俯视图。
图3是本实施方式涉及的飞行体的另一示意性侧视图。
图4是表示本实施方式的飞行体中的动作的一例的示意性侧视图。
图5是表示本实施方式的飞行体中的动作的一例的示意性侧视图。
图6的图(a)是变形例1涉及的飞行体的示意性俯视图。图6的图(b)是变形例1涉及的飞行体的示意性侧视图。
图7是变形例2涉及的飞行体的示意性俯视图。
图8的图(a)是变形例3涉及的飞行体的示意性俯视图。图8的图(b)是变形例3涉及的飞行体的示意性侧视图。
图9的图(a)是变形例4涉及的飞行体的示意性俯视图。图9的图(b)是变形例4涉及的飞行体的示意性侧视图。
图10的图(a)是变形例5涉及的飞行体的示意性俯视图。图10的图(b)是变形例5涉及的飞行体的示意性侧视图。
图11的图(a)是变形例6涉及的飞行体的示意性俯视图。图11的图(b)是变形例6涉及的飞行体的示意性侧视图。
图12的图(a)是变形例7涉及的飞行体的示意性俯视图。图12的图(b)是变形例7涉及的飞行体的示意性侧视图。
图13的图(a)是变形例8涉及的飞行体的示意性俯视图。图13的图(b)是变形例8涉及的飞行体的示意性侧视图。图13的图(c)是说明变形例8涉及的飞行体中的动作的一例的示意图。
图14的图(a)是变形例9涉及的飞行体的示意性俯视图。图14的图(b)是变形例9涉及的飞行体的示意性侧视图。
图15是表示变形例9涉及的飞行体中的动作的一例的示意性侧视图。
具体实施方式
以下,参照附图说明本发明的实施方式。在各图中,存在导入XYZ轴坐标的情况。此外,存在对相同的部件或者具有相同的功能的部件标注相同的附图标记的情况,存在在说明该部件之后省略适当说明的情况。
图1的(a)是本实施方式涉及的飞行体的示意性俯视图。图1的(b)是本实施方式涉及的飞行体的示意性侧视图。图2的(a)是本实施方式涉及的飞行体的示意性俯视图。图2的(b)是本实施方式涉及的飞行体的示意性侧视图。
在此,在图1的(a)、(b)中,在静止在地面的飞行体1A中,示出推进部10所包含的螺旋桨的旋转面相对于地面平行的状态,在图2的(a)、(b)中,示出在进行水平巡航的飞行体1A中,该旋转面相对于地面垂直的状态。
本实施方式涉及的飞行体1A是兼备垂直起飞着陆和水平巡航这两种功能的多旋翼机型的飞行体。飞行体1A能够在机身部20中收纳行李,既可以是无人飞行体,也可以是有人飞行体。
如图1的(a)~图2的(b)所示那样,飞行体1A具备推进部10和机身部20。首先,从推进部10进行说明。
推进部10在飞行体1A中产生在空中飞行的推进力。推进部10具备悬挂机身部20的功能。推进部10具有基体100、旋转轴110和推力产生机构120。
基体100是轴支承旋转轴110的块状的支承件。基体100与机身部20接触并固定在机身部20上。作为固定手段,能够列举螺栓固定、夹子固定等的机械性手段,以及利用了磁力、静电力的手段等。
旋转轴110贯通基体100。旋转轴110在X轴方向(第一方向)上延伸。旋转轴110构成为相对于基体100自由旋转。例如,在旋转轴110与基体100之间夹设轴承等的滑动部件,或者在旋转轴110与基体100接触的接触面上涂覆滑动层。此外,根据需要,在旋转轴110与基体100之间涂布润滑油。此外,也可以在推进部10上设置控制自由旋转的旋转轴110的动作的控制功能(例如,液压制动器)。即,当旋转轴110从该控制功能解除时,旋转轴110在基体100内自由旋转。
推力产生机构120例如能够列举出螺旋桨机构。以下,将推力产生机构120作为“螺旋桨机构120”进行说明。
螺旋桨机构120设置在旋转轴110的两端110e。螺旋桨机构120将旋转轴110的中心111作为基准而成为大致点对称的结构。例如,螺旋桨机构120在机身部20的一侧横向具有臂部125(第一臂部)、螺旋桨部121(第一螺旋桨部)和螺旋桨部122(第二螺旋桨部)。而且,螺旋桨机构120在机身部20的另一侧横向具有臂部126(第二臂部)、螺旋桨部123(第三螺旋桨部)和螺旋桨部124(第四螺旋桨部)。
螺旋桨部121与螺旋桨部122经由臂部125安装在旋转轴110的一端110e上。螺旋桨部123与螺旋桨部124经由臂部126被安装在旋转轴110的另一端110e上。在与X轴方向正交的方向上并列设置有螺旋桨部121和螺旋桨部122,并列设置有螺旋桨部123和螺旋桨部124。
例如,臂部125具有板状的主干部125t和从主干部125t分支的枝部125b。螺旋桨部121以及螺旋桨部122分别固定在枝部125b上。此外,臂部126具有板状的主干部126t和从主干部126t分支的枝部126b。螺旋桨部123以及螺旋桨部124分别固定在枝部126b上。
螺旋桨部121、螺旋桨部122、螺旋桨部123以及螺旋桨部124的各自的旋转面位于同一面内。换言之,螺旋桨部121、螺旋桨部122、螺旋桨部123以及螺旋桨部124各自的螺旋桨轴在相同的方向上延伸。螺旋桨部121、螺旋桨部122、螺旋桨部123以及螺旋桨部124分别被独立地控制,分别产生相同的推进力,或者分别产生不同的推进力。
螺旋桨部121、螺旋桨部122、螺旋桨部123以及螺旋桨部124分别是管道式风扇。例如,螺旋桨部121、螺旋桨部122、螺旋桨部123以及螺旋桨部124分别具有螺旋桨120p以及包围螺旋桨120p的圆筒形的管道120d。螺旋桨120p的中心轴与管道120d的中心轴一致。此外,螺旋桨120p被管道120d包围,从而利用管道120d起到消音作用。
螺旋桨部121以及螺旋桨部122经由臂部125轴支承在旋转轴110上,螺旋桨部123以及螺旋桨部124经由臂部126轴支承在旋转轴110上,所以螺旋桨机构120能够与旋转轴110共同将旋转轴110作为中心轴自由旋转。
例如,在飞行体1A垂直起飞着陆时,螺旋桨机构120的旋转面与地面大致平行(图1的(a)、(b))。此外,飞行体1A在进行水平巡航时,螺旋桨机构120的旋转面与地面大致垂直(图2的(a)、(b))。
飞行体1A在进行水平巡航时,管道120d的中心轴与地面成为大致平行。由此,管道120d作为翼部发挥作用。此外,臂部125的主干部125t的主面与基体100的主面成为大致一个面,臂部126的主干部126t的主面与基体100的主面成为大致一个面。由此,臂部125、126的一部分作为翼部发挥作用。
即,在飞行体1A进行水平巡航时,通过管道120d或者臂部125、126产生提升力。此外,在螺旋桨部121、螺旋桨部122、螺旋桨部123以及螺旋桨部124分别所包含的管道120d的后方设置有辅助翼120a(第三辅助翼)。
此外,推进部10具备在产生姿势控制力的功能、导航、引导、控制中需要的传感器、计算机等。从地面上将姿势控制功能、导航、引导、控制中需要的信号发送至推进部10。
机身部20在旋转轴110的下方悬挂在推进部10上。机身部20在与旋转轴110相比下方的位置具有重心201。例如,重心201位于旋转轴110的中心111的正下方。由于机身部20悬挂在推进部10上,在基体100固定有机身部20上部,所以机身部20也构成为绕旋转轴110自由旋转。
机身部20具有X轴方向成为短边方向,与X轴方向正交的Y轴方向(第二方向)成为长边方向的形状。机身部20的外形被设计成相对于迎面而来的气流形成最佳的空气阻力。例如,机身部20的外形成为将Y轴方向设为长边方向的流线形、鱼雷形等。此外,由于机身部20的重心201位于旋转轴110的中心111的正下方,所以即使飞行体1A从地面上沿垂直方向上升,机身部20也悬挂在推进部10上并维持水平状态。
在本实施方式中,将水平巡航中前进的方向(与气流相反的方向)作为飞行体的前方,将其反方向作为后方。在机身部20上,在推进部10的后方设置有垂直尾翼210和水平尾翼211、212。在水平尾翼211、212上,分别在其后方设置有辅助翼213(第一辅助翼)。
机身部20具有向螺旋桨机构供给电力的电池等的电源220。电源220例如以在X轴方向、Y轴方向以及Z轴方向的任一个上能够自动滑动的方式设置在机身部20内。例如,在机身部20内装载了行李之后,在机身部20的重心201的位置偏移的情况下,使电源220沿X轴方向、Y轴方向以及Z轴方向的任一个滑动。由此,能够使重心201的位置回到原本的位置。
此外,在机身部20的下部,以机身部20与地面不直接接触的方式附加设置有降落着陆用的起落橇(skid)230。起落橇230例如以成对构成的方式沿X轴方向排列,并且沿Y轴方向平行地延伸。起落橇230也可以是缩回到机身部20内的类型。
图3是本实施方式涉及的飞行体的另一示意性侧视图。
在飞行体1A中,机身部20构成为能够从推进部10拆卸。例如,推进部10的基体100在与设置在机身部20的上部的安装部202接触之后,基体100固定在安装部202上。而且,基体100也能够从安装部202拆下。安装、拆下既可以通过手动,也可以通过来自外部的信号自动进行。
接下来,关于飞行体1A的动作进行说明。在飞行体1A中,推进部10的螺旋桨机构120向垂直姿势或者水平姿势转换方向,通过推进部10产生的推进力,机身部20以垂直姿势起飞着陆,机身部20以水平姿势进行水平巡航。
例如,在将重力方向设为竖直方向的情况下,由螺旋桨机构120所表示的推力产生机构的垂直姿势是指推力产生机构的推力轴的轴方向(推力起作用的方向)相对于竖直方向平行的状态,水平姿势是指推力轴的轴方向相对于竖直方向正交的状态。
换言之,螺旋桨机构120的垂直姿势是指螺旋桨面相对于竖直方向垂直的状态,水平姿势是指螺旋桨面相对于竖直方向平行的状态。此外,即使螺旋桨机构120成为垂直姿势或者水平姿势,飞行体1A的机身部20也维持水平姿势。
图4的(a)~图5的(b)是表示本实施方式的飞行体的动作的一例的示意性侧视图。
例如,在图4的(a)中示出了飞行体1A从地面垂直离地时的状态。在该状态中,机身部20的长边方向(Y轴方向)与螺旋桨机构120的旋转面大致平行。当通过推进部10相对于地面垂直地作用的推进力超过飞行体1A的重力时,飞行体1A从地面离地。
此时,螺旋桨部121、螺旋桨部122、螺旋桨部123以及螺旋桨部124分别产生的推进力例如被设定为大致相同。此外,即使在离地之后,由于机身部20绕旋转轴110自由旋转,并且与旋转轴110相比机身部20的重心201位于下方,所以机身部20通过重力维持水平状态。
假设机身部20的重心201与旋转轴110的中心111重叠。在这种情况下,一旦机身部20由于某种原因以旋转轴110为中心倾斜,则以旋转轴110为中心的机身部20的前方与后方的力矩就会平衡,机身部20就不能返回到水平状态。在飞行体1A中,由于机身部20的重心201与旋转轴110相比位于下方,所以机身部20通过重力始终维持水平状态。
接下来,在空中,与螺旋桨部121以及螺旋桨部123分别产生的推进力(推进力A)相比,增加螺旋桨部122以及螺旋桨部124分别产生的推进力(推进力B)(推进力A<推进力B)。
由此,以旋转轴110为中心的旋转力矩对螺旋桨机构120起作用,螺旋桨机构120与旋转轴110一起以旋转轴110为中心开始自由旋转。例如,在图示的飞行体1A的方向中,螺旋桨机构120以旋转轴110为中心绕旋转轴110逆时针旋转,开始改变其方向。将该状态表示在图4的(b)中。
此时,由于机身部20绕旋转轴110自由旋转,并且与旋转轴110相比机身部20的重心201位于下方,所以机身部20通过重力维持水平状态。此外,由于螺旋桨机构120的方向改变,所以螺旋桨机构120产生的推进力相对于地面倾斜地作用,所以飞行体1A上升并开始向前方移动。
接下来,如果通过螺旋桨机构120的自由旋转使得机身部20的长边方向(Y轴方向)与螺旋桨机构120的旋转面大致正交,则将螺旋桨部121、螺旋桨部122、螺旋桨部123以及螺旋桨部124分别产生的推进力设定为大致相同。将该状态表示在图4的(c)中。
在这种状态下,推进部10产生的推进力相对于地面向水平方向起作用,飞行体1A进行水平巡航。此时,由于机身部20绕旋转轴110自由旋转,并且与旋转轴110相比机身部20的重心201位于下方,所以机身部20通过重力维持水平状态。
接下来,在使飞行体1A从水平巡航着陆于地面,使螺旋桨部121以及螺旋桨部123分别产生的推进力(推进力A)与螺旋桨部122以及螺旋桨部124分别产生的推进力(推进力B)相比増加(推进力A>推进力B)。将该状态表示在图5的(a)中。然后,与图4的(a)相同,如果螺旋桨机构120的旋转面与机身部20的长边方向(Y轴方向)大致平行,则以使推进力下降到比飞行体1A的重力低的方式使飞行体1A着陆在地面上。
另外,在强行降低飞行体1A向前移动的的速度中,如图5的(b)所示那样,也可以以推进力朝向机身部20的跟前的方式改变螺旋桨机构120的方向。
在飞行体1A中,在水平巡航时(图4的(c)),除了由螺旋桨机构120产生的推进力以外,提升力通过管道120d或者臂部125、126作用在飞行体1A上。
此外,在飞行体1A中,由于螺旋桨部121、螺旋桨部122、螺旋桨部123以及螺旋桨部124上分别设置有辅助翼120a,所以由该辅助翼120a也产生提升力。
此外,在飞行体1A中,机身部20以相对于气流最佳的空气阻力(低阻力)的方式设计。
此外,在飞行体1A中,由于螺旋桨机构120以旋转轴110为中心自由旋转而改变方向,所以不需要在飞行体1A内强行地改变螺旋桨机构120的方向的复杂旋转机构(例如,倾斜旋翼机构)。因此,飞行体1A变轻。
此外,在飞行体1A中,以旋转轴110为中心,机身部20自身维持水平状态。因此,在起飞着陆时以及水平巡航时,也不需要始终水平地维持机身部20的复杂控制技术。
如此,在飞行体1A进行水平巡航时,难以对螺旋桨机构120施加负载,飞行体1A能够以低功率获得较长的续航距离。此外,由于在飞行体1A中不需要复杂的旋转机构,所以故障变少,起飞着陆以及水平巡航中的可靠性也得到提高。
此外,在飞行体1A中,在水平巡航时,即使由于气流使机身部20以旋转轴110为中心旋转的力矩(俯仰力矩)在机身部20上起作用,通过附加设置在机身部20上的水平尾翼211、212,抑制该力矩的力在机身部20上起作用。
此外,在飞行体1A中,即使由于气流使将机身部20以旋转轴110为中心振动的力矩在机身部20上起作用,所以通过附加设置在水平尾翼211、212上的辅助翼213,能够使抵消振动的力矩在机身部20上起作用。
由此,机身部20能够在水平巡航时稳定地维持水平状态。此外,在起飞着陆时以及水平巡航时,由于机身部20始终维持水平方向,所以通过飞行体1A,例如能够放心地搬运精密机械、易碎物品、贵重物品、液体等。
此外,在飞行体1A中,例如,如果使附加设置于螺旋桨部121以及螺旋桨部122的辅助翼120a向上侧倾斜,使附加设置于螺旋桨部123以及螺旋桨部124的辅助翼120a向下侧倾斜,能够容易地进行滚动运动(机身部20绕前后轴的运动)。
如此,飞行体1A具备垂直起飞着陆与水平巡航这两种功能,具有优异的巡航性能。
接下来,关于飞行体的变形例进行说明。
(变形例1)
图6的(a)是变形例1涉及的飞行体的示意性俯视图。图6的(b)是变形例1涉及的飞行体的示意性侧视图。
在图6的(a)、(b)所示的飞行体1B中,在螺旋桨机构120没有设置管道。
例如,飞行体1B的螺旋桨机构120在机身部20的一侧横向具有臂部125c、125d、螺旋桨121p、122p。而且,螺旋桨机构120在机身部20的另一侧横向具有臂部126c、126d、螺旋桨123a、124p。在飞行体1B中,可以将臂部125c、125d统称为第一臂部,将臂部126c、126d统称为第二臂部。
例如,螺旋桨121p经由板状的臂部125c安装在旋转轴110的一端110e上。螺旋桨122p经由板状的臂部125d安装在旋转轴110另一端110e上。螺旋桨123p经由板状的臂部126c安装在旋转轴110的另一端110e上。螺旋桨124p经由板状的臂部126d安装在旋转轴110的另一端110e上。
在与X轴方向正交的方向上并列设置有螺旋桨121p和螺旋桨122p,并列设置有螺旋桨123p和螺旋桨124p。螺旋桨121p、螺旋桨122p、螺旋桨123p以及螺旋桨124p的各自的旋转面位于同一面内。
螺旋桨121p、螺旋桨122p、螺旋桨123p以及螺旋桨124p分别被独立地控制,分别产生相同的推进力,或者分别产生不同的推进力。
由于在飞行体1B中没有设置管道,所以实现了进一步的轻型化。由此,施加于螺旋桨机构120的负荷更加减少。此外,在飞行体1B中,在螺旋桨的旋转面与地面大致垂直时,臂部125c、125d、126c、126d的各自的主面与地面大致平行。由此,臂部125c、125d、126c、126d作为翼发挥功能,通过臂部125c、125d、126c、126d得到提升力。
此外,在飞行体1B中,分别在臂部125c、125d、126c、126d上设置有辅助翼127(第二辅助翼)。由此,在飞行体1B中,能够容易地进行滚动运动。
(变形例2)
图7是变形例2涉及的飞行体的示意性俯视图。
在图7所示的飞行体1C中,与飞行体1A相比增加设置有螺旋桨部。
例如,飞行体1C的螺旋桨机构120在机身部20的一侧横向上经由板状的臂部125具有两个螺旋桨部121和两个螺旋桨部122。而且,螺旋桨机构120在机身部20的另一侧横向上经由板状的臂部126具有两个螺旋桨部123和两个螺旋桨部124。
在飞行体1C中,在与X轴方向正交的方向上并列设置有螺旋桨部121和螺旋桨部122,并列设置有螺旋桨部123和螺旋桨部124。此外,两个螺旋桨部121沿X轴方向并列设置,两个螺旋桨部122沿X轴方向并列设置。此外,两个螺旋桨部123沿X轴方向并列设置,两个螺旋桨部124沿X轴方向并列设置。此外,邻接的螺旋桨部彼此在管道120d之间相互连接。
如果是这样的结构,螺旋桨机构120产生的推进力进一步増加。此外,即使任一个螺旋桨部发生故障,在X轴方向上邻接的螺旋桨部作为辅助故障的螺旋桨的辅助螺旋桨部发挥作用。
(变形例3)
图8的(a)是变形例3涉及的飞行体的示意性俯视图。图8的(b)是变形例3涉及的飞行体的示意性侧视图。
在图8的(a)、(b)所示的飞行体1D中,设置有降落着陆用的腿部128。腿部128分别附加设置于管道120d,向与推进力起作用的方向相反的方向延伸。
通过这样的结构,在地面上,腿部128作为代替起落橇230的着陆腿发挥作用。而且,由于在管道120d上直接设置有腿部128,所以在着陆后,在地面上,螺旋桨机构120的自由旋转通过腿部128被强行抑制。例如,即使在强风等的环境下放置飞行体1D,螺旋桨机构120也不会自由旋转。
(变形例4)
图9的(a)是变形例4涉及的飞行体的示意性俯视图。图9的(b)是变形例4涉及的飞行体的示意性侧视图。在图9的(a)、(b)中,省略机身部20的一部分。
在飞行体1E中,在臂部125的主干部125t上设置有遮蔽板125s,在臂部126的主干部126t上设置有遮蔽板126s。此外,在基体100上,在臂部125的一侧设置有遮蔽板101,在臂部126的一侧设置有遮蔽板102。在X轴方向上,遮蔽板125s与遮蔽板101邻接,遮蔽板126s与遮蔽板102邻接。
由此,在臂部125与基体100之间形成有遮蔽板125s以及遮蔽板101,在臂部126与基体100之间形成有遮蔽板126s以及遮蔽板102。如果设置这样的遮蔽板,则在臂部125、126的各自的表面与基体100的表面之间,空气的流动被抑制。
通过推进部10的自由旋转,在臂部125、126各自的表面与基体100的表面成为一个面的状态下(例如,水平巡航时),臂部125、126的各自的表面与基体100的表面之间没有形成间隙。然而,臂部125、126的各自的表面与基体100的表面若不是一个面时,臂部125、126的各自的表面与基体100的表面之间形成间隙。如果空气从该间隙漏出,则导致飞行体的提升力降低,翼部的阻力増加。
在飞行体1E中,通过遮蔽板125s、126s、101、102的夹持,由于臂部125、126的各自的表面与基体100的表面之间空气的流动被抑制,所以提升力降低以及阻力増加被抑制。
(变形例5)
图10的(a)是变形例5涉及的飞行体的示意性俯视图。图10的(b)是变形例5涉及的飞行体的示意性侧视图。
在飞行体1F中,在推进部10的后方的机身部20上设置有风扇240。风扇240设置在平行排列的垂直尾翼210a、210b之间。风扇240发挥使机身部20绕旋转轴110旋转的旋转力。
通过这样的结构,当悬停时或者低速飞行时,通过适当的风扇240的推进力更容易维持水平姿势。此外,由于风扇240设置在机身部20内,所以通过机身部20起到消音效果。
(变形例6)
图11的(a)是变形例6涉及的飞行体的示意性俯视图。图11的(b)是变形例6涉及的飞行体的示意性侧视图。
在飞行体1G中,在推进部10之下,在基体100上连接有具有腿部302的装载架30。装载架30具有由多个臂304组成骨架的组装构造。装载架30在其内部具有能够装载行李等的收纳空间303。在收纳空间303之下配置有电源220。此外,包含电源220的装载架30的重心301位于旋转轴110的中心111的正下方。
此外,在飞行体1G的前方设置有具有向前方凸起的曲面的防风板35。防风板35例如通过装载架30和基体100支持。此外,臂部31从基体100向飞行体1G的后方延伸。在该臂部31的端部设置有垂直尾翼210和水平尾翼211、212。
即使是这样的结构,飞行体1G也具备垂直起飞着陆与水平巡航这两个功能,具有优异的巡航性能。
(变形例7)
图12的(a)是变形例7涉及的飞行体的示意性俯视图。图12的(b)是变形例7涉及的飞行体的示意性侧视图。
在飞行体1H中,沿机身部20的Y轴方向的垂直截面的一部分构成为反弧形。例如,推进部10后方的机身后部250沿着Y轴方向的垂直截面的底边成为翘曲的反弧形形状。
根据这种结构,通过机身部20的空气动力学形状的改良,能够在没有尾翼的情况下得到空气动力学稳定。此外,通过消除尾翼,实现飞行体的轻型化、低阻力化。
(变形例8)
图13的(a)是变形例8涉及的飞行体的示意性俯视图。图13的(b)是变形例8涉及的飞行体的示意性侧视图。图13的(c)是说明变形例8涉及的飞行体中的动作的一例的示意图。在图13的(a)、(b)中,为了说明平行连杆机构40,未图示基体100以外的推进部10。在图13的(c)中,主要图示了平行连杆机构40与其周边。
在飞行体1I中,在机身部20与推进部10之间具备平行连杆机构40。平行连杆机构40具有一对旋转轴401、402、一对旋转轴403、404和多个臂410。
旋转轴401、402在X轴方向上贯通基体100。旋转轴401、402在X轴方向上延伸。旋转轴401、402在Y轴方向上排列。旋转轴403、404在X轴方向上贯通机身部20。旋转轴403、404在X轴方向上延伸。旋转轴403、404在Y轴方向上排列。旋转轴403、404在Y轴方向上排列的间隔与旋转轴401、402在Y轴方向上排列的间隔相同。旋转轴401、402分别在基体100内自由地旋转。旋转轴403、404分别在机身部20内自由地旋转。
旋转轴401的两端部与旋转轴403的两端部之间以及旋转轴402的两端部与旋转轴404的两端部之间通过多个臂410的任一个连接。多个臂410各自互相平行地配置。多个臂410各自的长度是相同的。
如果设置这样的平行连杆机构40,则如图13的(c)所示那样,基体100在机身部20的前后方向,即Y轴方向上具有自由度。然后,机身部20经由平行连杆机构40悬挂在基体100上。
由此,即使在水平巡航时由于空气阻力等而从飞行体的前方产生的俯仰力矩对机身部20起作用,由于前后排列的一组臂410,该力矩难以对机身部20起作用。
尤其是如低速水平巡航时那样,在由水平尾翼211、21引起的俯仰力矩的抑制力难以有效时,平行连杆机构40的作用有效地发挥。
(变形例9)
图14的(a)是变形例9涉及的飞行体的示意性俯视图。图14的(b)是变形例9涉及的飞行体的示意性侧视图。图15是表示变形例9涉及的飞行体中的动作的一例的示意性侧视图。
飞行体1J中的螺旋桨机构120被安装在旋转轴110的两端110e。螺旋桨机构120以中心111为基准成为大致点对称。螺旋桨机构120在机身部20的一侧横向具有臂部129a、129b、螺旋桨部121和螺旋桨部122,在机身部20的另一侧横向具有臂部129a、129b、螺旋桨部123和螺旋桨部124。
臂部129a从两端110e向机身部20的前方大致直线状地延伸。臂部129b从两端110e向机身部20的后方大致直线状地延伸。即,臂部129a与臂部129b从两端110e被分成两股。
螺旋桨部121与螺旋桨部122并列设置在与X轴方向正交的方向上。螺旋桨部123与螺旋桨部124并列设置在与X轴方向正交的方向上。螺旋桨部121经由臂部129a固定在旋转轴110的一端110e上。螺旋桨部122经由臂部129b固定在旋转轴110的一端110e上。螺旋桨部123经由臂部129a固定在旋转轴110的另一端110e上。螺旋桨部124经由臂部129b固定在旋转轴110的另一端110e上。
此外,在飞行体1J中,围栏130的内壁固定在两个臂部129a各自的前端129t以及两个臂部129b各自的前端129t上。围栏130是带状的板材形成为环状的环状体,例如具有与X轴方向大致平行地延伸的一对围栏部130a、与X轴方向大致正交的一对围栏部130b、以及将围栏部130a与围栏部130b连接起来的围栏部130c。在此,围栏部130a、130b是平板,围栏部130c是弯曲的。
将围栏130的宽度设为W1(与螺旋桨面平行的方向的宽度)时,宽度W1构成为比螺旋桨部121~124各自的厚度大。由此,螺旋桨部121~124分别被围栏130包围。围栏130作为总体包围螺旋桨部121~124的管道发挥作用。
在图15中示出飞行体1J进行水平巡航的一例。图15是从侧面观察水平巡航的飞行体1J。
当飞行体1J在水平巡航时,围栏130以旋转轴110为中心旋转,机身部20被围栏130包围。即,围栏部130a位于机身部20的上下。此时,上下围栏部130a的板面与进行水平巡航的方向大致平行,上下围栏部130a作为飞行体1J的主翼,对飞行体1J产生提升力。
此外,在飞行体1J中,由于围栏130总体包围螺旋桨部121~124,所以与在每个螺旋桨部121~124上附加设置管道的结构相比,能够减少管道(即,围栏130)的容积。由此,能够实现飞行体的轻型化。此外,由于围栏130为环状,具有规定的宽度W1,所以围栏130具有所希望的机械强度。
例如,与为每一个螺旋桨121~124设置管道的结构相比,螺旋桨121~124各自的直径相同的情况下,由于管道部分的总侧面积减少,所以实现轻型化,实现空气阻力的削减。此外,通过围栏130的箱型构造,维持所希望的强度的同时实现管道的轻型化。而且,在水平飞行中,围栏130产生提升力。此时,由于围栏130是箱型的并且轻型化,所以对臂部129a、129b主要施加张力就足够。
此外,螺旋桨部121~124被围栏130包围,从而螺旋桨部121~124产生的声音被围栏130隔音。由此,飞行体1J具有优异的静音性。
以上,虽然关于本发明的实施方式进行了说明,但本发明并不只限于上述的实施方式,当时也可以做各种改变。各实施方式不一定是独立的方式,但能够在技术上尽可能地组合。
附图标记说明
1A、1B、1C、1D、1E、1F、1G、1I、1J…飞行体
10…推进部
20…机身部
100…基体
30…装载架
31、125、125c、125d、126、126c、126d…臂部
35…防风板
40…平行连杆机构
101、102、125s、126s…遮蔽板110、401、402、403、404…旋转轴110e…端
111…中心
120…螺旋桨机构
120a、127、213…辅助翼120d…管道
120p…螺旋桨121、122、123、124…螺旋桨部125b、126b…枝部
125t、126t…主干部
128、302…腿部
129a、129b…臂部
129t…前端
130…围栏
130a、130b、130c…围栏部201、301…重心
202…安装部
210、210a、210b…垂直尾翼211、212…水平尾翼
220…电源
231…起落橇
240…风扇
250…机身后部
303…收纳空间304、410…臂。
- 飞行体控制装置、飞行体控制系统及飞行体控制方法
- 飞行体和飞行体控制系统