一种六轴传感信号的转换方法及装置
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及数据转换领域,尤其涉及一种六轴传感信号的转换方法及装置。
背景技术
当前主要是使用传统的基于欧氏距离的DNN模型(深度神经网络模型,DeepNeural Networks)中的CNN模型(卷积神经网络模型, Convolutional Neural Networks)对传感信号进行分类。
而使用CNN模型对使用IMU(惯性测量单元,Inertial Measurement Unit)采集的六轴传感信号进行震颤动作分类预测时无法保持位移不变性,也就导致实际的监测过程中对震颤判定的准确性不强,这是因为 CNN模型是通过欧氏距离对传感信号的各轴(x轴、y轴和z轴或Roll 轴、Pitch轴和Heading轴等轴向)进行相关性描述,而六轴传感信号中的各轴是一种不规则的关系,也就是一种非欧氏距离的关系,所以使用 CNN模型无法准确地对六轴传感信号进行分类。
GCN模型(图卷积神经网络模型,Generalized Connection Network) 可以通过非欧式距离对传感信号进行分类,但是GCN模型的输入数据为图数据(邻接矩阵),而IMU采集到的六轴传感信号不是图数据, GCN模型无法直接对六轴传感信号进行分类,所以本领域急需一种能够将六轴传感信号转换为图数据的方法。
发明内容
本发明提供一种六轴传感信号的转换方法及装置,以至少解决现有技术中存在的以上技术问题。
本发明一方面提供一种六轴传感信号的转换方法,包括:
采集第一原始信号,所述第一原始信号为六轴传感信号;
将第一原始信号按照预设长度拆分成N段子信号,所述N段子信号组成第一原始信号序列;
对所述第一原始信号序列进行标准化处理,得到第一标准信号序列;
根据第一标准信号序列,计算第一相关矩阵;
对第一相关矩阵进行拉普拉斯归一化,得到邻接矩阵。
其中,所述对所述第一原始信号序列进行标准化处理,得到第一标准信号序列,该方法包括:
计算所述第一原始信号序列中N段子信号的平均信号强度μ和信号强度标准差值σ;
对于每段子信号:根据公式
其中,所述根据第一标准信号序列,计算第一相关矩阵,该方法包括:
计算所述N段所述子信号中两两的相关系数,得到N*N个相关系数;
对于所述N段子信号中的第i段子信号和第j段子信号,根据以下公式计算相关系数r(i,j):
所述Cov(S′
将N*N个相关系数组成矩阵,得到第一相关矩阵。
其中,所述对第一相关矩阵进行拉普拉斯归一化,得到邻接矩阵,该方法包括:
根据如下公式计算第一相关矩阵A的逆矩阵:
所述I是与第一相关矩阵A相同阶数的单位矩阵;
根据如下公式计算第一相关矩阵A的度矩阵的逆矩阵
所述D是第一相关矩阵A的度矩阵;
根据如下公式计算第一相关矩阵A的邻接矩阵:
其中,所述得到邻接矩阵后,该方法还包括:
通过GCN模型对所述邻接矩阵进行识别,得到所述第一原始信号的分类结果。
本发明另一方面提供一种六轴传感信号的转换装置,包括:
采集模块,用于采集第一原始信号,所述第一原始信号为六轴传感信号;
处理模块,用于将第一原始信号按照预设长度拆分成N段子信号,所述N段子信号组成第一原始信号序列;
所述处理模块,还用于对所述第一原始信号序列进行标准化处理,得到第一标准信号序列;
计算模块,用于根据第一标准信号序列,计算第一相关矩阵;
所述计算模块,还用于对第一相关矩阵进行拉普拉斯归一化,得到邻接矩阵。
其中,所述处理模块,还用于计算所述第一原始信号序列中N段子信号的平均信号强度μ和信号强度标准差值σ;
所述处理模块,还用于对于每段子信号:根据公式
其中,所述计算模块,还用于对于所述N段子信号中的第i段子信号和第j段子信号,根据以下公式计算相关系数r(i,j):
所述Cov(S′
所述计算模块,还用于将N*N个相关系数组成矩阵,得到第一相关矩阵。
其中,所述计算模块,还用于根据如下公式计算第一相关矩阵A的逆矩阵:
所述I是与第一相关矩阵A相同阶数的单位矩阵;
根据如下公式计算第一相关矩阵A的度矩阵的逆矩阵
所述D是第一相关矩阵A的度矩阵;
根据如下公式计算第一相关矩阵A的邻接矩阵:
其中,该装置还包括:GCN模型;
GCN模型,用于对所述邻接矩阵进行识别,得到所述第一原始信号的分类结果。
上述方案中,通过根据第一标准信号序列来计算第一相关矩阵,再对第一相关矩阵进行拉普拉斯归一化,得到图数据,使得在计算过程中实现了更加有效率的梯度下降以及反向传播,且避免了梯度爆炸和梯度消失的问题,同时简化了计算的过程,提高了将六轴传感信号转化为图数据的效率,而成功将六轴传感信号转化为图数据,使得可以通过GCN模型对该图数据进行分类,得出该图数据对应的六轴传感信号的分类结果。
附图说明
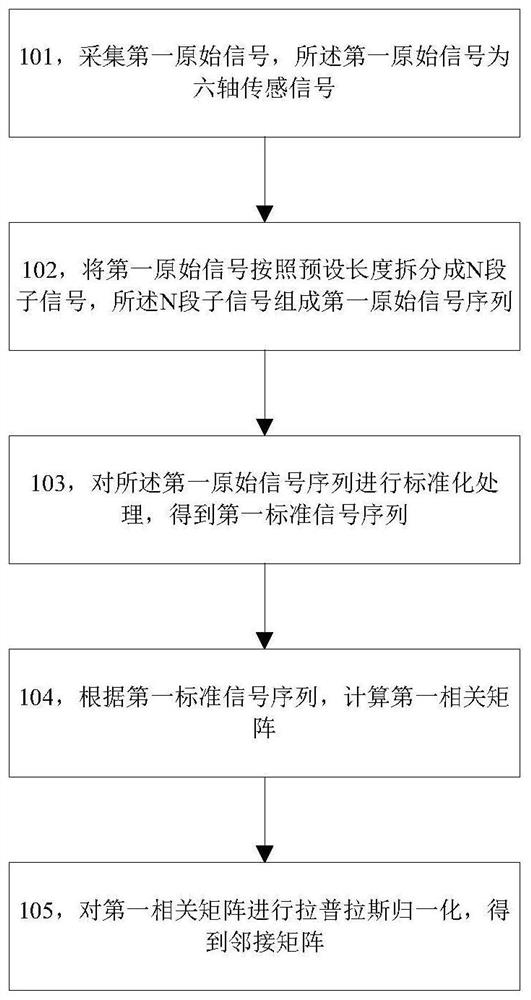
图1示出了本发明一实施例提供的六轴传感信号的转换方法流程示意图;
图2示出了本发明一实施例提供的六轴传感信号的转换装置结构示意图;
图3示出了本发明一实施例提供的六轴传感信号的示意图。
具体实施方式
为使本发明的目的、特征、优点能够更加的明显和易懂,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而非全部实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为了将六轴传感信号转化为图数据以供后续处理,本发明一实施例提供了一种六轴传感信号的转换方法,如图1所示,该方法包括:
步骤101,采集第一原始信号,所述第一原始信号为六轴传感信号。
使用安装了惯性测量单元IMU的任意佩戴设备对佩戴者的震颤数据进行采集,得到第一原始信号,第一原始信号为六轴传感信号,如图 3所示,六轴传感信号包括3-AxisACC中的x轴、y轴和z轴和3-Axis GYRO中的Roll、Pitch和Heading六个轴向,这六个轴向都包含了时间维度和方向轴维度上的数据,其中各方向轴之间的关系是一种不规则的关系,也就是一种非欧氏距离的关系,所以CNN模型在方向轴这个维度上无法保持位移不变性,需要使用GCN模型来对六轴传感信号进行震颤的分类预测,确定本次震颤对应的各种类型的概率,这里的各种类型可以是:重度震颤、中度震颤、轻度震颤和正常震颤,其中,重度震颤可能是帕金森病的病征,所以需要将六轴传感信号转化为图数据。
步骤102,将第一原始信号按照预设长度拆分成N段子信号,所述 N段子信号组成第一原始信号序列。
将第一原始信号按照预设的固定长度进行拆分,得到N段预设固定长度的子信号,N段子信号组成了第一原始信号序列,每段子信号包含了信号强度等数据。
步骤103,对所述第一原始信号序列进行标准化处理,得到第一标准信号序列。
计算第一原始信号序列中N段子信号的平均信号强度μ和信号强度标准差值σ,再根据公式
步骤104,根据第一标准信号序列,计算第一相关矩阵。
对于第一标准信号序列中包含的N段经过标准化处理后的子信号,将N段经过标准化处理后的子信号两两根据公式
步骤105,对第一相关矩阵进行拉普拉斯归一化,得到邻接矩阵。
根据以下公式来计算第一相关矩阵A的逆矩阵A~:
其中,I是与第一相关矩阵A相同阶数的单位矩阵。
根据以下公式来计算第一相关矩阵A的度矩阵D的逆矩阵
根据以下公式来计算邻接矩阵:
在步骤105中,所述得到图数据后,在一可实施方式中,通过GCN 模型对所述邻接矩阵进行识别,得到所述第一原始信号的分类结果。
将邻接矩阵输入GCN模型中,通过GCN模型对邻接矩阵进行震颤数据的分类预测,最后输出该邻接矩阵对应的第一原始信号的分类结果。
上述方案中,通过根据第一标准信号序列来计算第一相关矩阵,再对第一相关矩阵进行拉普拉斯归一化,得到图数据,使得在计算过程中实现了更加有效率的梯度下降以及反向传播,且避免了梯度爆炸和梯度消失的问题,同时简化了计算的过程,提高了将六轴传感信号转化为图数据的效率,而成功将六轴传感信号转化为图数据,使得可以通过GCN模型对该图数据进行分类,得出该图数据对应的六轴传感信号的分类结果。
为了实现上述的方法,本发明实施例还提供了一种六轴传感信号的转换装置,如图2所示,包括:
采集模块,用于采集第一原始信号,所述第一原始信号为六轴传感信号;
处理模块,用于将第一原始信号按照预设长度拆分成N段子信号,所述N段子信号组成第一原始信号序列;
所述处理模块,还用于对所述第一原始信号序列进行标准化处理,得到第一标准信号序列;
计算模块,用于根据第一标准信号序列,计算第一相关矩阵;
所述计算模块,还用于对第一相关矩阵进行拉普拉斯归一化,得到邻接矩阵。
其中,所述处理模块,还用于计算所述第一原始信号序列中N段子信号的平均信号强度μ和信号强度标准差值σ;
所述处理模块,还用于对于每段子信号:根据公式
其中,所述计算模块,还用于对于所述N段子信号中的第i段子信号的信号强度和第j段子信号的信号强度,根据以下公式计算相关系数 r(i,j):
所述Cov(S
所述计算模块,还用于将N*N个相关系数组成矩阵,得到第一相关矩阵。
其中,所述计算模块,还用于对于根据如下公式计算第一相关矩阵 A的逆矩阵:
所述I是与第一相关矩阵A相同阶数的单位矩阵;
根据如下公式计算第一相关矩阵A的度矩阵的逆矩阵
所述D是第一相关矩阵A的度矩阵;
根据如下公式计算第一相关矩阵A的邻接矩阵:
其中,该装置还包括:GCN模型;
GCN模型,用于对所述邻接矩阵进行识别,得到所述第一原始信号的分类结果。
除了上述方法和设备以外,本申请的实施例还可以是计算机程序产品,其包括计算机程序指令,所述计算机程序指令在被处理器运行时使得所述处理器执行本说明书上述“示例性方法”部分中描述的根据本申请各种实施例的方法中的步骤。
所述计算机程序产品可以以一种或多种程序设计语言的任意组合来编写用于执行本申请实施例操作的程序代码,所述程序设计语言包括面向对象的程序设计语言,诸如Java、C++等,还包括常规的过程式程序设计语言,诸如“C”语言或类似的程序设计语言。程序代码可以完全地在用户计算设备上执行、部分地在用户设备上执行、作为一个独立的软件包执行、部分在用户计算设备上部分在远程计算设备上执行、或者完全在远程计算设备或服务器上执行。
此外,本申请的实施例还可以是计算机可读存储介质,其上存储有计算机程序指令,所述计算机程序指令在被处理器运行时使得所述处理器执行本说明书上述“示例性方法”部分中描述的根据本申请各种实施例的方法中的步骤。
所述计算机可读存储介质可以采用一个或多个可读介质的任意组合。可读介质可以是可读信号介质或者可读存储介质。可读存储介质例如可以包括但不限于电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(EPROM或闪存)、光纤、便携式紧凑盘只读存储器(CD-ROM)、光存储器件、磁存储器件、或者上述的任意合适的组合。
以上结合具体实施例描述了本申请的基本原理,但是,需要指出的是,在本申请中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本申请的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用,而非限制,上述细节并不限制本申请为必须采用上述具体的细节来实现。
本申请中涉及的器件、装置、设备、系统的方框图仅作为例示性的例子并且不意图要求或暗示必须按照方框图示出的方式进行连接、布置、配置。如本领域技术人员将认识到的,可以按任意方式连接、布置、配置这些器件、装置、设备、系统。诸如“包括”、“包含”、“具有”等等的词语是开放性词汇,指“包括但不限于”,且可与其互换使用。这里所使用的词汇“或”和“和”指词汇“和/或”,且可与其互换使用,除非上下文明确指示不是如此。这里所使用的词汇“诸如”指词组“如但不限于”,且可与其互换使用。
还需要指出的是,在本申请的装置、设备和方法中,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本申请的等效方案。
提供所公开的方面的以上描述以使本领域的任何技术人员能够做出或者使用本申请。对这些方面的各种修改对于本领域技术人员而言是非常显而易见的,并且在此定义的一般原理可以应用于其他方面而不脱离本申请的范围。因此,本申请不意图被限制到在此示出的方面,而是按照与在此公开的原理和新颖的特征一致的最宽范围。
为了例示和描述的目的已经给出了以上描述。此外,此描述不意图将本申请的实施例限制到在此公开的形式。尽管以上已经讨论了多个示例方面和实施例,但是本领域技术人员将认识到其某些变型、修改、改变、添加和子组合。
- 一种六轴传感信号的转换方法及装置
- 一种基于六轴惯性传感信号的人体动作检测与识别方法