一种凸轮五连杆机构快速优化设计与评估方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及机器人运动控制领域,特别涉及一种凸轮五连杆机构快速优化设计与评估方法。
背景技术
作为纸尿裤生产线的核心部件—连杆凸轮组合变速变横装置被各大厂商大面积应用于自家生产线上,中国专利文献CN00803255.6提供了一种变速变横装置的实现方法,它实现了纸尿裤在两条不同生产线上的速度变换与角度变换。其中速度的变换依靠凸轮五连杆机构来实现,对本装置的整体性能具有较大影响;角度的变换由曲柄棍子加凸轮来实现。
现有技术的缺陷和不足:
1.连杆凸轮组合变速变横装置应用范围广,要适应不同厂家的生产需求就需要根据具体情况重新设计此装置,设计过程繁琐,耗时,不能实现快速设计。
2.对于具体情况设计出的连杆凸轮组合变速变横装置,其尺寸和形状也可大不相同,哪那种设计是最优的呢,传统的设计方法并不能知晓,即不能实现优化设计。
3.没有运动精度分析,不能知道机构的可靠性。
发明内容
针对背景技术中提到的问题,本发明的目的是提供一种凸轮五连杆机构快速优化设计与评估方法,以解决背景技术中提到的问题。
本发明的上述技术目的是通过以下技术方案得以实现的:
一种凸轮五连杆机构快速优化设计与评估方法,包括以下步骤:
Step1:自由度分析,分析凸轮五连杆机构的自由度为2;
Step2:确定输出构件的速度曲线;
Step3:将凸轮五连杆机构进行数学建模,确定凸轮五连杆机构的数学模型;
Step4:确定一根杆的输入速度;
Step5:求解;
Step6:最优设计;
Step7:运动精度可靠性分析。
较佳的,所述Step3中,确定凸轮五连杆机构的杆长分别为l
凸轮五连杆机构的端点分别为A、B、C、D、E;
AB与x轴的夹角为θ
原动件1的转速为ω
得凸轮五连杆机构的矢量方程为:
l
以复数形式表示并按欧拉公式展开,得公式1:
较佳的,求解所述公式1得各杆位置如下:
θ
式中:
A=l
B=-l
D=A
较佳的,所述θ3包括正值和负值,取值时根据杆3CD的位置来确定取值。
较佳的,所述凸轮五连杆机构的端点A、B、C、D、E的点坐标按下式计算:
较佳的,所述Step4中,确定一根杆的输入速度时,以杆1AB为输入,速度为60转每分钟。
较佳的,所述Step5中在求解时,以杆5BE的E点作为凸轮理论轮廓线E点运动轨迹即为凸轮理论轮廓线。
较佳的,所述Step6最优设计时,在凸轮五连杆机构加上一个附加的公共转动-ω
直线BE与x轴夹角按下式计算:
凸轮切线与x轴夹角按下式计算:
则凸轮压力角α按下式计算:
较佳的,所述Step7运动精度可靠性分析中,得:
l′
式中:
对于凸轮机构采用等效杆长理论进行分析计算,可得杆5BE等效长度l″
综上所述,本发明主要具有以下有益效果:
本凸轮五连杆机构快速优化设计与评估方法可以实现快速设计,对于不同厂家速度需求,避免重复计算,加快设计速度;本凸轮五连杆机构快速优化设计与评估方法可以实现优化设计,在一定范围内实现最优机构的自动寻找;本凸轮五连杆机构快速优化设计与评估方法对装置的可靠性进行了分析,提高设计的可靠性;本凸轮五连杆机构快速优化设计与评估方法能够实现自动化设计,对于设计者开发难度降低,降低企业成本,提高产品质量。
附图说明
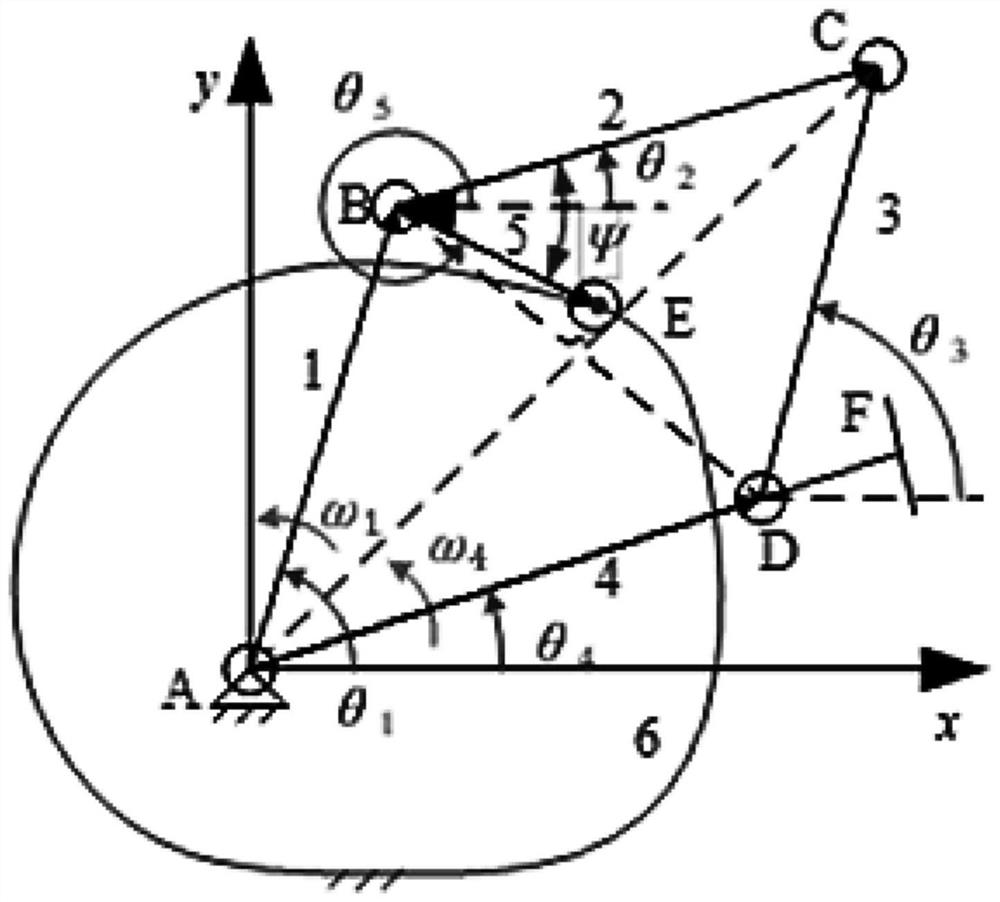
图1为凸轮-连杆机构运动原理图;
图2为变速曲线图;
图3为优化前与优化后的凸轮形状图;
图4为优化前与优化后的结果对比图;
图5为考虑间隙的凸轮五杆模型图;
图6为考虑运动副间隙的机构失效概率图;
图7为杆4AD角度误差图;
图8为软件界面图之一;
图9为软件界面图之二。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
参考图1至图9,一种凸轮五连杆机构快速优化设计与评估方法,包括以下步骤:
Step1:自由度分析,分析凸轮五连杆机构的自由度为2;
Step2:确定输出构件的速度曲线;
Step3:将凸轮五连杆机构进行数学建模,确定凸轮五连杆机构的数学模型;
Step4:确定一根杆的输入速度;
Step5:求解;
Step6:最优设计;
Step7:运动精度可靠性分析。
其中,Step3中,确定凸轮五连杆机构的杆长分别为l
凸轮五连杆机构的端点分别为A、B、C、D、E;
AB与x轴的夹角为θ
原动件1的转速为ω
得凸轮五连杆机构的矢量方程为:
l
以复数形式表示并按欧拉公式展开,得公式1:
较佳的,求解公式1得各杆位置如下:
θ
式中:
A=l
B=-l
D=A
其中,θ3包括正值和负值,取值时根据杆3CD的位置来确定取值。
其中,凸轮五连杆机构的端点A、B、C、D、E的点坐标按下式计算:
其中,Step4中,确定一根杆的输入速度时,以杆1AB为输入,速度为60转每分钟。
其中,Step5中在求解时,以杆5BE的E点作为凸轮理论轮廓线E点运动轨迹即为凸轮理论轮廓线。
其中,Step6最优设计时,在凸轮五连杆机构加上一个附加的公共转动-ω
直线BE与x轴夹角按下式计算:
凸轮切线与x轴夹角按下式计算:
则凸轮压力角α按下式计算:
其中,Step7运动精度可靠性分析中,得:
l′
式中:
对于凸轮机构采用等效杆长理论进行分析计算,可得杆5BE等效长度l″
其中,本凸轮五连杆机构快速优化设计与评估方法可以实现快速设计,对于不同厂家速度需求,避免重复计算,加快设计速度;本凸轮五连杆机构快速优化设计与评估方法可以实现优化设计,在一定范围内实现最优机构的自动寻找;本凸轮五连杆机构快速优化设计与评估方法对装置的可靠性进行了分析,提高设计的可靠性;本凸轮五连杆机构快速优化设计与评估方法能够实现自动化设计,对于设计者开发难度降低,降低企业成本,提高产品质量。
实施例2
与实施例1的不同之处在于:
参考图1至图9,一种凸轮五连杆机构快速优化设计与评估方法,包括以下步骤:
Step1:自由度分析,分析凸轮五连杆机构的自由度为2;
Step2:确定输出构件的速度曲线;
Step3:将凸轮五连杆机构进行数学建模,确定凸轮五连杆机构的数学模型;
Step4:确定一根杆的输入速度;
Step5:求解;
Step6:最优设计;
Step7:运动精度可靠性分析。
其中,本凸轮五连杆机构快速优化设计与评估方法可以实现快速设计,对于不同厂家速度需求,避免重复计算,加快设计速度;本凸轮五连杆机构快速优化设计与评估方法可以实现优化设计,在一定范围内实现最优机构的自动寻找;本凸轮五连杆机构快速优化设计与评估方法对装置的可靠性进行了分析,提高设计的可靠性;本凸轮五连杆机构快速优化设计与评估方法能够实现自动化设计,对于设计者开发难度降低,降低企业成本,提高产品质量。
其中,Step3中,确定凸轮五连杆机构的杆长分别为l
凸轮五连杆机构的端点分别为A、B、C、D、E;
AB与x轴的夹角为θ
原动件1的转速为ω
得凸轮五连杆机构的矢量方程为:
l
以复数形式表示并按欧拉公式展开,得公式1:
较佳的,求解公式1得各杆位置如下:
θ
式中:
A=l
B=-l
D=A
其中,θ3包括正值和负值,取值时根据杆3CD的位置来确定取值。
其中,凸轮五连杆机构的端点A、B、C、D、E的点坐标按下式计算:
其中,Step4中,确定一根杆的输入速度时,以杆1AB为输入,速度为60转每分钟。
其中,Step5中在求解时,以杆5BE的E点作为凸轮理论轮廓线E点运动轨迹即为凸轮理论轮廓线。
其中,Step6最优设计时,在凸轮五连杆机构加上一个附加的公共转动-ω
直线BE与x轴夹角按下式计算:
凸轮切线与x轴夹角按下式计算:
则凸轮压力角α按下式计算:
将上述公式编程带入粒子群算法(编程)得到结果如下表:
最佳杆长l1、l2、l3、l4、l5为:210,194.1,88.5,373.5,35。
其中,Step7运动精度可靠性分析中,得:
l′
式中:
对于凸轮机构采用等效杆长理论进行分析计算,可得杆5BE等效长度l″
一般认为运动副间隙误差服从正态分布,按3σ原则,可确定孔、销尺寸的标准差。
偏心距矢量角度γ1~γ4及β服从[0,360]内的均匀分布:
式中:
es在基孔制时表示轴尺寸的上公差,基轴制时表示孔尺寸的下偏差;
δi1、δi2分别为孔、销尺寸公差带。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种凸轮五连杆机构快速优化设计与评估方法
- 基于凸轮连杆机构实现快速同步扫描的装置