一种隧道反光环行走装置
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及机械设备技术领域,尤其涉及一种隧道反光环行走装置。
背景技术
在现代生活中,在每个发展的大城市或者重要道路里,都会设有隧道。在每个隧道内部都会顺序安设一定量漫反射的隧道反光环,用于支撑和对隧道内部进行通光,但在来来往往的车辆行驶过程中,会导致这些反光环被尘土覆盖,从而使阳光反射率下降,造成隧道可见度下降,严重的甚至会影响驾驶人员的隧道行车安全。因此,需要一定时期清洁或者检查一次。
现有的隧道反光环的清洁或检查主要是通过人工来进行,主要是人工拿着清洁工具盒检查工具来操作,登高操作不仅难度高,而且具有一定的危险性,因此通过设置能够实现在隧道反光环上运动的行走装置能够搭配清洁工具盒检查工具来实现清洁和检查,成为了需求。当然,也有一些针对反光环的行走装置被提出。中国专利申请CN211815870U公开了一种高速公路隧道反光环清洗自行走机构,其通过吸附的方式来进行固定和行走。但是,隧道内部比较湿滑,并且反光环侧行走面比较曲折,行走的面比较粗糙,难以通过吸附的方式来固定、行走,同时隧道反光环表面处可能会具有铆钉类凹凸面,所以采用吸附装置来行走、固定更加不现实。
通过市场调研所显示,针对隧道反光环的行走装置尚未普及,但问题却真实存在,需要我们去解决。
发明内容
针对以上不足,本发明提供一种隧道反光环行走装置,能够便于在隧道反光环上行走。
为达到上述目的,本发明采用如下技术方案:
一种隧道反光环行走装置,包括有两块相向设置的主板,两块所述主板在一侧边处通过铰座相铰接,两块所述主板在铰接的侧边上分别设置有延伸板,两块所述延伸板之间设置有弹性件以使得两块所述主板具有绕所述铰座转动并互相靠近的趋势;
每块所述主板上均设置有由行走驱动电机带动的行走轮,所述行走轮的行走方向为所述主板的前后方向,每个所述行走轮均有部分外周位于两块所述主板之间以使得能够与隧道反光环相接触;
至少一块所述主板上设置有辅助轮,所述辅助轮有部分外周位于两块所述主板之间以使得能够与隧道反光环相接触。
进一步地,所述行走轮的外周上设置有凹型和/或凸型的花纹。
进一步地,每块所述主板上的行走轮至少为两个,每个所述行走轮均独立配备有一个行走驱动电机,每块所述主板上的多个所述行走轮从铰接的侧边往相对的另一侧边的方向上并排分布,且两块所述主板上的行走轮之间两两一组,互相相对设置。
进一步地,两块所述主板铰接的侧边处设置有导向轮,所述导向轮至少为两个,分别分布在两块所述主板铰接的侧边处的前后两端位置。
进一步地,两块所述主板铰接的侧边处设置有边缘检测传感器,所述边缘检测传感器为两个,分布在所述主板的前后两端;两块所述主板的其中一块上还设置有控制器,所述控制器与所述边缘检测传感器和行走驱动电机相连接。
进一步地,所述主板的前后两端分别设置有端部检测传感器,两块所述主板的其中一块上还设置有控制器,所述控制器与所述端部检测传感器和行走驱动电机相连接。
进一步地,两块所述延伸板之间形成一个夹角,所述弹性件位于该夹角上,包括有压簧以及位于所述压簧两端的弹簧套筒,一个弹簧套筒与一块延伸板的外端部固定连接,另一个弹簧套筒与另一块延伸板固的外端部定连接。
进一步地,所述行走驱动电机的输出轴上安装有主动齿轮,所述行走轮通过行走轮支座安装在所述主板上并同轴设置有从动齿轮,所述主动齿轮和从动齿轮相啮合。
进一步地,所述辅助轮为两个以上,分别位于所述主板的前后两端。
与现有技术相比,本发明的有益效果是:
1、本发明通过设置具有互相靠近趋势的主板及其上的行走轮,配合有辅助轮,能够实现稳固夹紧在隧道反光环上并实现在隧道反光环上行走,行走平稳,能够适应湿滑的、表面粗糙不太平整的、曲折的、具有铆钉类凹凸面的、具有阶梯状的局部结构的隧道反光环的侧面;
2、通过设置多组行走轮,并为每个行走轮独立配置行走驱动电机,以实现行走轮的转速调整,最终通过控制不同组的行走轮的转速,利用差速原理来实现行走装置的转向,以实现行走装置在弧形的隧道反光环上平稳行走;
3、通过设置导向轮,在实施时能够通过导向轮与隧道反光环的侧边接触,从而有助于行走装置在弧形的隧道反光环上平稳行走;设置辅助轮,有助于行走装置在经过隧道反光环阶梯状的局部结构时能够实现平稳过渡,以实现顺畅行走;
4、通过设置边缘检测传感器,利用差速原理来实现行走装置的转向,以自动实现行走装置在弧形的隧道反光环上平稳行走,并能够有效防止行走装置从隧道反光环的侧边上脱离隧道反光环;通过设置端部检测传感器,能够自动实现行走装置的反向行走,以实现自动的往复行走。
附图说明
为了更清楚地说明本发明实施例的技术方案,以下将对实施例描述中所需要使用的附图作简单地介绍。
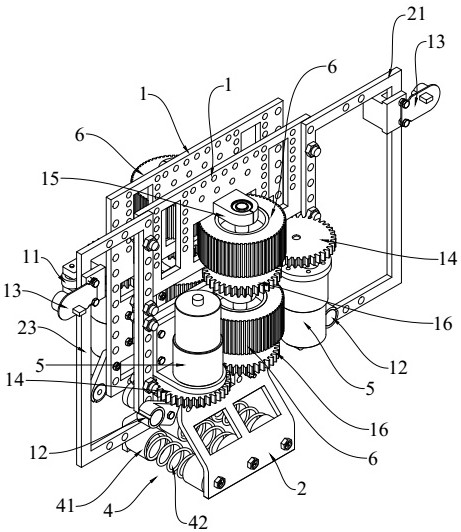
图1为本发明一个视角的结构示意图;
图2为本发明一个视角的结构示意图;
图3为本发明一个视角的结构示意图;
图4为本发明的实施示意图(隧道反光环具有阶梯状的局部结构);
图5为本发明的实施示意图(隧道反光环具有带状铆钉类凹凸面的局部结构);
图6为本发明的实施示意图(隧道反光环同时具有阶梯状以及带状铆钉类凹凸面的局部结构)。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参照图1至图3,本发明优选的实施例提供一种隧道反光环行走装置,包括有两块相向设置的主板1,两块主板1在一侧边处通过铰座3相铰接,两块主板1在铰接的侧边上分别设置有延伸板2,两块延伸板2之间设置有弹性件4以使得两块主板1具有绕铰座3转动并互相靠近的趋势。其中,在优选的实施例中,两块延伸板2的中部倾斜向外设置以使得两块延伸板2之间形成一个夹角,弹性件4位于该夹角上,弹性件4包括有压簧42以及位于压簧42两端的弹簧套筒41,一个弹簧套筒41与一块延伸板2的外端部固定连接,另一个弹簧套筒41与另一块延伸板2的外端部固定连接。当按压两块延伸板2的外端部或者是掰开与两块主板1相铰接的侧边所相对的两块主板1的侧边时,压簧42收缩,两块延伸板2的外端部互相靠近,且两块主板1绕铰座3转动,并互相远离,而松开时,在压簧42的作用下,弹性件4复位,驱动两块延伸板2复位,延伸板2复位使得两块主板1具有绕铰座3转动并互相靠近的趋势,也即压簧42具有使得两块主板1具有绕铰座3转动并互相靠近的驱动力。本优选的实施例中,弹性件4为三个,由前往后方向并排设置在延伸板2的外端部之间,以实现一定强度的驱动力。
每块主板1上均设置有由行走驱动电机5带动的行走轮6,行走轮6的行走方向为主板1的前后方向,每个行走轮6均有部分外周位于两块主板1之间以使得能够与隧道反光环相接触。两块主板1上的行走轮6是一一相对设置的。
其中,主板1和延伸板2为了减少重量而做了部分镂空设置,而行走驱动电机5和滚刷驱动电机8均通过电机座设置在两张主板1相远离的侧面,而在行走轮6相对于的位置,主板1具有镂空的通孔,以使得行走轮6的部分外周能够通过该镂空的通孔而位于两块主板1之间。
在优选的实施例中,行走驱动电机5的输出轴上安装有主动齿轮14,行走轮6通过行走轮支座15安装在主板1上并同轴设置有从动齿轮16,主动齿轮14和从动齿轮16相啮合,实施时,启动行走驱动电机5,行走驱动电机5运转带动主动齿轮14转动,从动齿轮16随之转动,与从动齿轮16同轴设置的行走轮6一同转动,以实现通过行走驱动电机5驱动行走轮6转动。通过齿轮传动的方式,可以改变扭矩,也便于改变转速,相比于行走驱动电机5和行走轮6直连时的长度,通过齿轮传动的方式能够使得长度更短,从而使得整个结构更为紧凑,占用空间更少。本优选的实施例中,行走轮6采用橡胶的材质制成,行走轮6的外周表面(行走表面)开设有凹型的花纹,一方面能够增加摩擦力,以实现稳固的夹紧,另一方面能够保证行走轮6在部分不太平整的、曲折的、具有铆钉类凹凸面的隧道反光环的侧面上的顺畅、平稳过渡。
一块主板1上通过支座设置有辅助轮11,辅助轮11采用橡胶的材质制成,辅助轮11有部分外周位于两块主板1之间以使得能够与隧道反光环相接触。当行走装置安装夹紧在隧道反光环上时,辅助轮11与隧道反光环侧面相接触,从而能够实现对整个装置具有一定的支撑、夹紧、平衡作用,且有助于整个行走装置在部分不太平整的、曲折的、具有铆钉类凹凸面(如图5和图6所示)的隧道反光环的侧面上行走。且部分隧道反光环不是一体成型,而是多段拼接,在部分拼接的地方会有部分重叠的情况(如图4和图6所示),则会使得隧道反光环出现阶梯状的局部结构,设置了辅助轮11,能够实现在行走时,行走装置在经过隧道反光环阶梯状的局部结构时能够实现平稳过渡,以实现顺畅行走。本优选的实施例在其中一块主板1的前后两端分别设置了前端安装架21和后端块安装架23,优选的,辅助轮11为两个,分别设置在前端安装架21和后端块安装架23上,且为远离两块主板1互相铰接的一侧。值得注意的是,辅助轮11可以为从动轮,也可以自带动力,当辅助轮11自带动力时,其转动方向以及转速与行走轮的转动方向以及转速适应配合,以实现装置的行走,本优选的实施例中辅助轮11为从动轮。
实施时,请参照图4至图6,按压两块延伸板2的外端部或是掰开与两块主板1相铰接的侧边所相对的两块主板1的侧边,以使得两块延伸板2的外端部相靠近,弹性件4被挤压,两块主板1绕铰座3转动,并使得两块主板1具有互相远离的趋势,两块主板1在与相铰接的侧边相对应的侧边相远离并具有让隧道反光环22的侧边进入的入口,且此时主板1及其上的行走轮6互相临时分离,从而可以让两块主板1及其上的行走轮6分别位于隧道反光环22的两侧面,此时松开延伸板2,在弹性件4的弹性复位作用下,两块主板1具有绕铰座3转动并互相靠近的趋势,从而让两块主板1互相靠近,此时一块主板1上的行走轮6的外周与隧道反光环22的一侧面相接触,另一块主板1上的行走轮6与隧道反光环22的另一侧面相接触,且同时辅助轮11也与隧道反光环22的侧面相接触,也即在弹性件4的作用下实现两块主板1及其上的行走轮6对隧道反光环22的夹持,以实现将整个行走装置固定在隧道反光环22上,辅助轮11同时具有一定的支撑、平衡作用;当需要行走时,开启行走驱动电机5,在行走驱动电机5的带动下,行走轮6转动从而能够驱动两块主板1行走,也即实现整个行走装置在隧道反光环22上行走,该行走方式能够适应于湿滑的、表面粗糙不太平整的、具有阶梯的、曲折的、具有铆钉类凹凸面的隧道反光环的侧面的行走,同时也能适应在拼接的地方具有部分重叠的隧道反光环,且行走平稳。当行走装置从隧道反光环22的一端移动到另一端后,可以通过控制行走驱动电机5反转以带动行走轮6反转,从而以反方向实现再次在隧道反光环22上的行走,通过上述方式可实现反复行走。值得注意的是,本优选的实施例中,仅在一块主板1上设置了辅助轮11,而在其他优选的实施例中,也可以在两块主板1上均设置辅助轮11,或者是每个主板上设置多个辅助轮11,以实现更多的支撑、平衡。当在行走装置上装配清洁工具和/或检查工具时,可以通过清洁工具和/或检查工具来实现清洁和/或检查。
在优选的实施例中,每块主板1上的行走轮6为两个,每个行走轮6均独立配备有一个行走驱动电机5,每块主板1上的两个行走轮6从铰接的侧边往相对的另一侧边的方向上并排分布,且两块主板1上的行走轮6之间两两一组,互相相对设置,以实现贴合、夹紧在隧道反光环的侧面上,从而实现在隧道反光环上的行走。同时,考虑到隧道反光环为侧边呈弧形的结构,因此,一直直行的方式难以实现在隧道反光环上的连续、顺畅行走。本发明中,每个行走轮6均独立配备有一个行走驱动电机5,通过调整行走驱动电机5的转速,可以主动、实时调整各个行走轮6的转速,也即通过采用控制两组行走轮6对应的不同行走驱动电机5的不同转速,从而使得各组行走轮6之间形成差速运转,以实现转向,如通过调整靠近主板1铰接处的一组行走轮6的转速慢于另一组行走轮6,从而可以让行走装置往隧道反光环的外侧弧形边(靠近铰座3的侧边)转向,从而实现行走装置在呈弧形的隧道反光环上的连续、顺畅行走。各组行走轮6的转速调整可根据具体的情况设定,如根据行走的速度、隧道反光环的弧度等。利用差速原理行走装置可实现在隧道反光环上的转向功能,并且能平稳地沿着隧道反光环的弧线行走,从而实现在隧道反光环的行走更加均匀、顺畅。
两块主板1铰接的侧边处通过支座设置有导向轮10,导向轮10为两个,分布在主板1的前后两端,,位于主板1铰接的侧边处位置,固定在其中一块主板1上导向轮10位于两块主板1之间用以与隧道反光环的侧边(外侧弧形边)相接触。导向轮10采用橡胶的材质制成。由于隧道反光环为侧边呈弧形的结构,因此在行走装置行走过程中,可能出现行走装置一直直行并使得铰座3与隧道反光环的侧边相接触的情况,并妨碍行走装置的顺畅行走,则设置了用以与隧道反光环的侧边相接触的导向轮10,则通过设置导向轮10,取代铰座3与隧道反光环的侧边相接触,并实现一个导向功能以利于在弧形的侧边上行走,使得行走装置行走更为顺畅。导向轮10至少为两个,分布在主板1的前后两端,从而可以适应行走装置的往复行走。
两块主板1铰接的侧边处设置有边缘检测传感器12,边缘检测传感器12为两个,分布在主板1的前后两端;两块主板1的其中一块上还设置有控制器(图中未示出),控制器优选使用单片机的形式,控制器与边缘检测传感器12和行走驱动电机5相连接。行走装置行走时,有可能出现行走时往外侧偏离过大的情况,如果持续往外侧偏离过大地行走,则可能会造成行走轮6等脱离隧道反光环,最终造成整个行走装置脱离隧道反光环,而从隧道反光环上意外掉落。在主板1铰接的侧边处设置边缘检测传感器12,边缘检测传感器12向控制器发送信号,当行走装置正常行走时,位于行走方向前端的边缘检测传感器12在投影上与隧道反光环的侧面相重叠,则行走正常,而如果是往外侧偏离行走时,位于行走方向前端的边缘检测传感器12在投影上不再与隧道反光环的侧面有重叠,则此时位于行走方向前端的边缘检测传感器12的检测信号发生改变,控制器接收到信号,则控制行走驱动电机5,使得靠近铰座3的一组行走轮的转速快于另一组行走轮6,从而可以让行走装置往隧道反光环的内侧行走,直至位于行走方向前端的边缘检测传感器12在投影上与隧道反光环的侧面相重叠(当然可以适当往内),则行走装置又重新进入正常行走路线,通过这种方式,可以自动实现转向调整,以实现行走装置在整个弧形的隧道反光环上的连续行走。在主板1的前后两端均设有边缘检测传感器12,以适应行走装置的往复行走。主板1的前后两端分别设置有端部检测传感器13,端部检测传感器13与控制器相连接并向控制器发送信号,当行走装置在隧道反光环上行走时,位于行走方向前端的端部检测传感器13在投影上与隧道反光环的侧面相重叠,则可通过控制行走驱动电机5带动行走轮6驱动行走装置继续前行,而当行走装置到达隧道反光环的末端时,位于行走方向前端的端部检测传感器13在投影上不再与隧道反光环的侧面有重叠,则此时位于行走方向前端的端部检测传感器13的检测信号发生改变,控制器接收到信号,则控制行走驱动电机5反向转动,此时行走轮6反向转动,驱动行走装置反向行走,也即通过该方式能够自动控制行走装置反向行走,从而可以自动实现行走装置在隧道反光环上的往复行走。本优选的实施例在其中一块主板1的前后两端分别设置了前端安装架21和后端安装架23,优选的,端部检测传感器13为两个,分别设置在前端安装架21和后端安装架23上。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 一种隧道反光环行走装置
- 一种隧道反光增亮环