一种基于高精度步进电机的自动取送片机构
文献发布时间:2023-06-19 11:59:12
技术领域
本发明属于生物医疗技术领域,具体是指一种基于高精度步进电机的自动取送片机构。
背景技术
载玻片是用显微镜观察东西时用来放东西的玻璃片或石英片,制作样本时,将细胞或组织切片放在载玻片上,将盖玻片放置其上,用作观察。在实验室对微生物的形态进行观察要制作标本片、水浸片,载玻片是使用的主要用具。
现有的生物医学领域主要是还是手动对送玻片到显微镜的检测平台,耗时长,需要一直有人值守,还受人员操作的熟练程度影响。
发明内容
为了解决上述难题,本发明提供了一种工作效率高,可以在控制范围内三维运动达到高精度的取送玻片的自动取送片机构。
为了实现上述功能,本发明采取的技术方案如下:一种基于高精度步进电机的自动取送片机构,包括伸缩组件、夹爪、XY连接块、XZ连接块、X轴运动机构、Y轴运动机构和Z轴取送机构,所述X轴运动机构的固定端通过XY连接块与Y轴运动机构的运动端顶部固定相连,所述Z轴取送机构的固定端通过XZ连接块与X轴运动机构的运动端固定相连,所述Z轴取送机构的运动端与伸缩组件固定相连,所述伸缩组件与夹爪固定相连,所述Z轴取送机构包括挡板、底板、导轨、光电感应器、电机、滑块、法兰、螺丝、导轨滑块和丝杆,所述光电感应器与底板固定相连,所述电机固定设于底板一端,所述挡板通过螺丝固定设于底板另一端,所述丝杆一端通过法兰与电机的输出端固定相连,所述丝杆另一端与挡板可旋转连接,所述丝杆中部可滑动套接设有滑块,所述导轨与底板固定相连,所述导轨滑块可滑动卡接设于导轨内,所述导轨滑块与滑块固定相连,使用时利用光电感应器控制电机运动,电机带动丝杆旋转,通过导轨滑块的作用力将电机的旋转作用力转化为滑块沿丝杆的滑动作用力。
进一步地,所述Z轴取送机构的光电开关设有两个
进一步地,所述X轴运动机构和Y轴运动机构与Z轴取送机构结构相同。
进一步地,所述X轴运动机构、Y轴运动机构和Z轴取送机构两两垂直。
进一步地,所述电机为高精度步进电机。
本发明采取上述结构取得有益效果如下:本发明提供的一种基于高精度步进电机的自动取送片机构结构简单体积小,精度高,稳定性优越,针对生物医疗领域用到的显微图像自动化系统,结合自身的可以适配多种染色架的高通量玻片存放装置和可重复精确定位的医用载玻片固定方法及自身的软件程序可以对玻片存放装置内的玻片精准的送到待扫描平台并还回。
附图说明
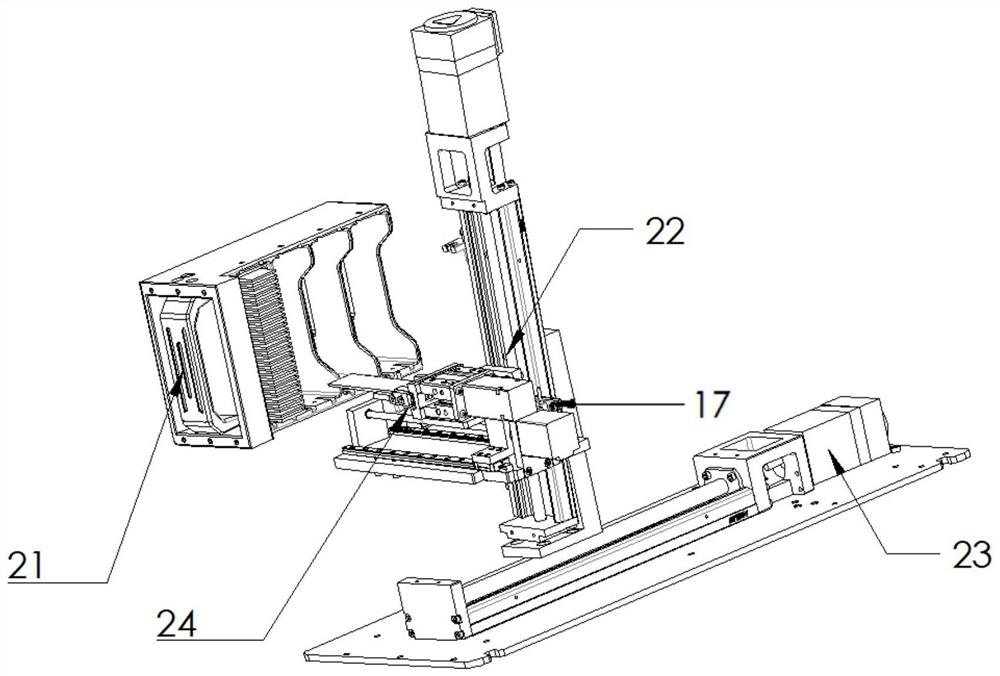
图1为本发明一种基于高精度步进电机的自动取送片机构的结构示意图;
图2为本发明一种基于高精度步进电机的自动取送片机构的取送机构的结构图;
图3为本发明一种基于高精度步进电机的自动取送片机构的X、Y轴运动机构的结构图。
其中,1、挡板,2、底板,3、导轨,4、光电感应器,5、伸缩组件,6、电机,7、滑块,8、螺丝,9、玻片,10、夹爪,11、导轨滑块,12、丝杆,15、法兰,16、XY连接块,17、XZ连接块,21、玻片盒,22、X轴运动机构,23、Y轴运动机构,24、Z轴取送机构。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。以下结合附图,对本发明做进一步详细说明。
如图1-3所述,本发明一种基于高精度步进电机的自动取送片机构,包括伸缩组件5、夹爪10、XY连接块16、XZ连接块17、X轴运动机构22、Y轴运动机构23和Z轴取送机构24,所述X轴运动机构22的固定端通过XY连接块16与Y轴运动机构23的运动端顶部固定相连,所述Z轴取送机构24的固定端通过XZ连接块17与X轴运动机构22的运动端固定相连,所述Z轴取送机构24的运动端与伸缩组件5固定相连,所述伸缩组件5与夹爪10固定相连,所述Z轴取送机构24包括挡板1、底板2、导轨3、光电感应器4、电机6、滑块7、螺丝8、导轨滑块11、法兰15、和丝杆12,所述光电感应器4与底板2固定相连,所述电机6固定设于底板2一端,所述挡板1通过螺丝8固定设于底板2另一端,所述丝杆12一端通过法兰15与电机6的输出端固定相连,所述丝杆12另一端与挡板1可旋转连接,所述丝杆12中部可滑动套接设有滑块7,所述导轨3与底板2固定相连,所述导轨滑块11可滑动卡接设于导轨3内,所述导轨滑块11与滑块7固定相连。
所述Z轴取送机构24的光电开关设有两个。
所述X轴运动机构22、Y轴运动机构23和Z轴取送机构24结构相同。
所述X轴运动机构22、Y轴运动机构23和Z轴取送机构24两两垂直。
所述电机6为高精度步进电机。
具体使用时,利用X轴运动机构22中的电机6驱动丝杆12控制水平方向位置,利用Y轴运动机构23中的电机6驱动丝杆12控制垂直方向位置,利用Z轴取送机构24中的电机6驱动丝杆12控制前后方向位置,光电感应器4控制电机6运动,电机6带动丝杆12旋转,通过导轨滑块11的作用力将电机6的旋转作用力转化为滑块7沿丝杆12的滑动作用力,从而在控制范围内实现精准的三维运动,利用伸缩组件5带动夹爪10运动,将玻片9从玻片9盒中取出并从到待扫描平台。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种基于高精度步进电机的自动取送片机构
- 一种基于高精度步进电机的自动取送片机构