一种方程式赛车电控前后可协调空套机构
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及一种方程式赛车空套机构,尤其是指一种方程式赛车电控前后可协调空套机构。
背景技术
赛车的速度是影响比赛成绩的一个重要指标,既需要赛车的速度越快越好,但又要考虑赛车在高速的稳定性问题。由于空气动力学套件具有提高赛车行驶稳定性,特别是转弯时的稳定性,所以其在赛车技术上的应用变得越来越重要,几乎所有赛车都有应用各种空气动力学套件。当赛车走弯道赛道时,处于转弯,虽然空气动力学套件能带来足够的下压力以便提高赛车的操控稳定性,但是当赛车走直线赛道时,处于高速,空气动力套件提供下压力的同时会带来阻力,影响其直线运动的发挥。
发明内容
本发明的目的在于针对上述问题,提供一种可调节、使用灵活和自动控制的方程式赛车电控前后可协调空套机构。本发明通过车速传感器、制动踏板位置传感器和横摆角位置传感器将车速信号传给ECU,再ECU通过电机控制器控制电机同时调节前后翼片的攻角,实现高速下小攻角而减小空气阻力,提高赛车的速度,而在低速下转弯时增大攻角,增大空气阻力以带来更大的下压力,提高赛车弯道过弯的操纵稳定性。
本发明的目的可采用以下技术方案来达到:
一种方程式赛车电控前后可协调空套机构,包括安装于赛车前侧的前翼装置,以及安装于赛车后侧的后翼装置;所述前翼装置包括前翼主翼、前翼端板、襟翼端板、第一襟翼、第二襟翼、第一电机和第一连杆机构,所述前翼端板设为两个且分别固定安装于前翼主翼的两端上,所述襟翼端板设于两个前翼端板之间的前翼主翼;所述第一襟翼和第二襟翼的一端可旋转安装于前翼端板上,第一襟翼和第二襟翼的另一端可旋转安装于襟翼端板上,所述第二襟翼设于第一襟翼的上方;所述第一电机通过第一连杆机构与第一襟翼和第二襟翼连接而驱动第一襟翼和第二襟翼转动;所述后翼装置包括后翼主翼、后翼端板、第三襟翼、第四襟翼、第二电机和第二连杆机构,所述后翼端板设为两个且分别固定安装于后翼主翼的两端上;所述第三襟翼和第四襟翼的两端分别可旋转安装于两个后翼端板上,所述第四襟翼设于第三襟翼的上方;所述第二电机通过第二连杆机构与第三襟翼和第四襟翼连接而驱动第三襟翼和第四襟翼转动。
作为一种优选的方案,所述第一电机和第二电机通过电机驱动器与单片机的输出端连接,单片机的输入端与车速传感器、制动踏板位置传感器和横摆角位置传感器连接;赛车走完直线赛道进入弯道后,车手踩下制动踏板,单片机根据接收到的车速传感器、制动踏板位置传感器和横摆角位置传感器的信号控制第一电机和第二电机驱动第一襟翼、第二襟翼、第三襟翼和第四襟翼转动而增大第一襟翼、第二襟翼、第三襟翼的攻角;赛车走完弯道进入直线赛道后,车手踩下加速踏板,单片机根据接收到的车速传感器、制动踏板位置传感器和横摆角位置传感器的信号控制第一电机和第二电机驱动第一襟翼、第二襟翼、第三襟翼和第四襟翼反向转动而减小第一襟翼、第二襟翼、第三襟翼的攻角。
作为一种优选的方案,所述第一连杆机构包括第一曲柄、第一连杆至第四连杆,所述第一曲柄的一端与第一电机的转轴连接,第一曲柄的另一端与第一连杆一端铰接,第一连杆的另一端与第二连杆和第三连杆的一端铰接,第二连杆的另一端与第四连杆的一端铰接,第三连杆的另一端与第一襟翼铰接,第四连杆的另一端与第二襟翼铰接。
作为一种优选的方案,所述第二连杆机构包括第二曲柄、第五连杆至第八连杆,所述第二曲柄的一端与第二电机的转轴连接,第二曲柄的另一端与第五连杆一端铰接,第五连杆的另一端与第六连杆和第七连杆的一端铰接,第六连杆的另一端与第八连杆的一端铰接,第七连杆的另一端与第三襟翼铰接,第八连杆的另一端与第四襟翼铰接。
作为一种优选的方案,所述第一电机和第二电机为步进电机。
实施本发明,具有如下有益效果:
1、本发明在赛车走完直线赛道进入弯道后,车手踩下制动踏板,单片机根据接收到的车速传感器、制动踏板位置传感器和横摆角位置传感器的信号控制第一电机和第二电机驱动第一襟翼、第二襟翼、第三襟翼和第四襟翼转动而增大第一襟翼、第二襟翼、第三襟翼和第四襟翼的攻角;赛车走完弯道进入直线赛道后,车手踩下加速踏板,单片机根据接收到的车速传感器、制动踏板位置传感器和横摆角位置传感器的信号控制第一电机和第二电机驱动第一襟翼、第二襟翼、第三襟翼和第四襟翼反向转动而减小第一襟翼、第二襟翼、第三襟翼和第四襟翼的攻角,具有可调节、使用灵活和自动控制的优点。
2、当第一电机驱动第一曲柄转动时,第一曲柄驱动第一连杆带动第二连杆和第三连杆摆动,进而使第三连杆驱动第一襟翼摆动,从而调节第一襟翼的攻角,同时第二连杆带动第四连杆摆动而调节第二襟翼的攻角,实现对第一襟翼和第二襟翼的攻角进行调大或调小,同时,第二电机驱动第二曲柄转动时,第二曲柄驱动第五连杆带动第六连杆和第七连杆摆动,进而使第七连杆驱动第三襟翼摆动,从而调节第三襟翼的攻角,同时第六连杆带动第八连杆摆动而调节第四襟翼的攻角,实现对第三襟翼和第四襟翼的攻角进行调大或调小,以适应赛车进入直线赛道或弯道,具有结构简单、调节范围大,使用灵活和方便
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
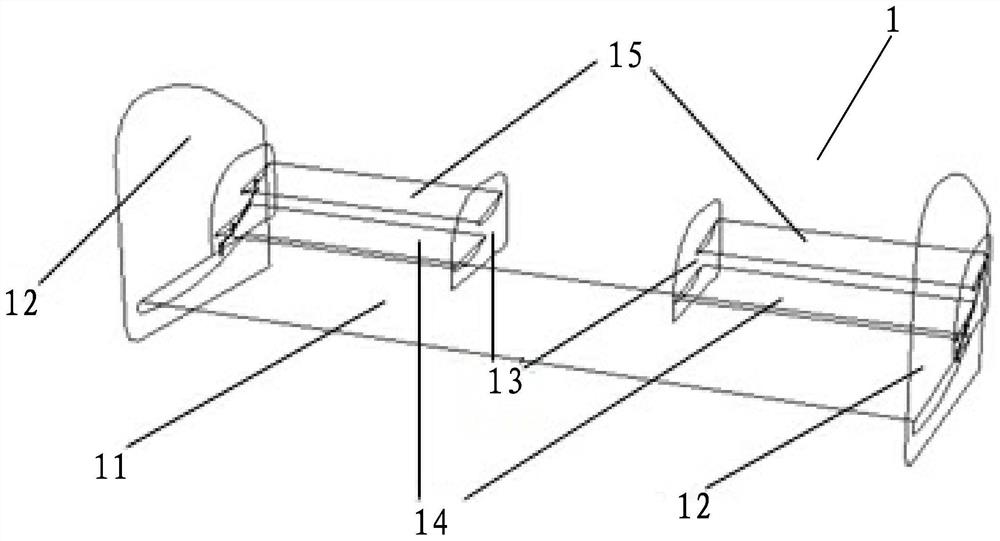
图1是本发明方程式赛车电控前后可协调空套机构的前翼装置的结构示意图。
图2是图1的右视图。
图3是图1的左视图。
图4是本发明方程式赛车电控前后可协调空套机构的后翼装置的结构示意图。
图5是图4的右视图。
图6是本发明方程式赛车电控前后可协调空套机构的自动控制流程框图。
图7是本发明方程式赛车电控前后可协调空套机构的第三襟翼和第四襟翼处于小攻角状态的结构示意图。
图8是本发明方程式赛车电控前后可协调空套机构的第三襟翼和第四襟翼处于大攻角状态的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
参照图1至图8,本实施例涉及方程式赛车电控前后可协调空套机构,包括安装于赛车前侧的前翼装置1,以及安装于赛车后侧的后翼装置2;所述前翼装置1包括前翼主翼11、前翼端板12、襟翼端板13、第一襟翼14、第二襟翼15、第一电机16和第一连杆机构17,所述前翼端板12设为两个且分别固定安装于前翼主翼11的两端上,所述襟翼端板13设于两个前翼端板12之间的前翼主翼 11;所述第一襟翼14和第二襟翼15的一端可旋转安装于前翼端板12上,第一襟翼14和第二襟翼15的另一端可旋转安装于襟翼端板13上,所述第二襟翼15 设于第一襟翼14的上方;所述第一电机16通过第一连杆机构17与第一襟翼14 和第二襟翼15连接而驱动第一襟翼14和第二襟翼15转动;所述后翼装置2包括后翼主翼21、后翼端板22、第三襟翼23、第四襟翼24、第二电机25和第二连杆机构26,所述后翼端板22设为两个且分别固定安装于后翼主翼21的两端上;所述第三襟翼23和第四襟翼24的两端分别可旋转安装于两个后翼端板22 上,所述第四襟翼24设于第三襟翼23的上方;所述第二电机25通过第二连杆机构26与第三襟翼23和第四襟翼24连接而驱动第三襟翼23和第四襟翼24转动。
当赛车进入直线赛道时,可以通过启动第一电机16和第二电机25分别驱动第一连杆机构17和第二连杆机构26,使第一连杆机构17驱动第一襟翼14和第二襟翼15转动,同时使第二连杆机构26驱动第二襟翼15和第四襟翼24转动,以调节第一襟翼14至第四襟翼24的攻角减小,可减小额外产生的过多空气阻力,达到顺利提速,增大赛车的行驶速度,同时提高赛车的经济性。
当赛车进入直线赛道时,可以通过启动第一电机16和第二电机25反向转动而分别驱动第一连杆机构17和第二连杆机构26,使第一连杆机构17驱动第一襟翼14和第二襟翼15转动,同时使第二连杆机构26驱动第二襟翼15和第四襟翼24转动,以调节第一襟翼14至第四襟翼24的攻角增大,以带来更大的下压力,提高了赛车的操纵稳定性和转弯时的稳定性,避免赛车发生侧滑。
所述第一电机16和第二电机25通过电机驱动器与单片机(ECU)的输出端连接,单片机的输入端与车速传感器、制动踏板位置传感器和横摆角位置传感器连接;赛车走完直线赛道进入弯道后,车手踩下制动踏板,单片机根据接收到的车速传感器、制动踏板位置传感器和横摆角位置传感器的信号控制第一电机16和第二电机25驱动第一襟翼14、第二襟翼15、第三襟翼23和第四襟翼24转动而增大第一襟翼14、第二襟翼15、第三襟翼23和第四襟翼24的攻角;赛车走完弯道进入直线赛道后,车手踩下加速踏板,单片机根据接收到的车速传感器、制动踏板位置传感器和横摆角位置传感器的信号控制第一电机16 和第二电机25驱动第一襟翼14、第二襟翼15、第三襟翼23和第四襟翼24反向转动而减小第一襟翼14、第二襟翼15、第三襟翼23和第四襟翼24的攻角,具有可调节、使用灵活和自动控制的优点。
所述第一连杆机构17包括第一曲柄171、第一连杆至第四连杆(172至175),所述第一曲柄171的一端与第一电机16的转轴连接,第一曲柄171的另一端与第一连杆172一端铰接,第一连杆172的另一端与第二连杆173和第三连杆174 的一端铰接,第二连杆173的另一端与第四连杆175的一端铰接,第三连杆174 的另一端与第一襟翼14铰接,第四连杆175的另一端与第二襟翼15铰接。所述第二连杆机构26包括第二曲柄261、第五连杆至第八连杆(262至265),所述第二曲柄261的一端与第二电机25的转轴连接,第二曲柄261的另一端与第五连杆262一端铰接,第五连杆262的另一端与第六连杆263和第七连杆264 的一端铰接,第六连杆263的另一端与第八连杆265的一端铰接,第七连杆264 的另一端与第三襟翼23铰接,第八连杆265的另一端与第四襟翼24铰接。
当第一电机16驱动第一曲柄171转动时,第一曲柄171驱动第一连杆172 带动第二连杆173和第三连杆174摆动,进而使第三连杆174驱动第一襟翼14 摆动,从而调节第一襟翼14的攻角,同时第二连杆173带动第四连杆175摆动而调节第二襟翼15的攻角,实现对第一襟翼14和第二襟翼15的攻角进行调大或调小,同时,第二电机25驱动第二曲柄261转动时,第二曲柄261驱动第五连杆262带动第六连杆263和第七连杆264摆动,进而使第七连杆264驱动第三襟翼23摆动,从而调节第三襟翼23的攻角,同时第六连杆263带动第八连杆265摆动而调节第四襟翼24的攻角,实现对第三襟翼23和第四襟翼24的攻角进行调大或调小,以适应赛车进入直线赛道或弯道,具有结构简单、调节范围大,使用灵活和方便。
所述第一电机16和第二电机25为步进电机。当然,第一电机16和第二电机25也可以采用伺服电机。
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
- 一种方程式赛车电控前后可协调空套机构
- 一种方程式赛车电控前后可协调空套机构