风力发电机组塔筒外壁补漆机器人
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及风力发电机组维护设备技术领域,尤其是一种风力发电机组塔筒外壁补漆机器人。
背景技术
风力发电机组的塔筒外壁长期暴露在空气中,夏季承受高温,冬季承受严寒。致使风力发电机组塔筒外壁的保护漆经常脱落,保护漆脱落就会造成塔筒生锈,如果补漆不及时,生锈部位会扩展影响到塔筒的强度,严重的会发生倒塔现象。现在有的补漆方式是人工补漆,需要将吊篮和人从风力发电机组机舱吊下来进行补漆工作。如果遇到阵风,平台会随之晃动,致使工作效率低下,危险系数非常高。本发明公开一个风力发电机组塔筒外壁补漆机器人的结构,代替现在的人工塔筒补漆。
发明内容
本发明提供了一种风力发电机组塔筒外壁补漆机器人,用于解决现有技术中风力发电机组塔筒需要人工补漆效率低、危险系数高的的问题。
本发明采用如下技术方案:
一种风力发电机组塔筒外壁补漆机器人,包括:行走部、打磨部以及喷漆部;
所述行走部包括:动力履带底盘以及磁铁,所述磁铁固定设置在所述履带接地面;
所述打磨部包括:打磨电机、滚筒、机械臂以及机械臂电机,所述滚筒与所述机械臂前端转动连接,所述打磨电机与所述滚筒传动连接;所述机械臂后端与所述动力履带底盘上表面铰接,所述机械臂电机与所述机械臂传动连接;
所述喷漆部固定设置在所述动力履带底盘的上表面。
进一步地,还包括:控制部,所述控制部包括:控制模块、摄像头以及通信模块,所述摄像头用于采集塔筒外壁图像信号,所述控制模块用于将图像信号通过所述通信模块转发到外部终端。
进一步地,还包括:所述喷漆部包括:电动气泵、储漆罐、气枪以及喷漆阀,所述喷漆阀一端与所述电动气泵的出气口连通,所述喷漆阀另一端与所述气枪的进气口连通,所述储漆罐与所述气枪的进漆口连通。
进一步地,所述喷漆阀为电磁阀,所述控制模块还用于根据来自所述通信模块的指令控制所述喷漆阀的开闭,所述控制模块还用于根据来自所述通信模块的指令控制所述打磨电机和/或所述机械臂电机的启停;所述喷漆阀、所述打磨电机以及所述机械臂电机分别与所述控制模块电连接。
进一步地,所述控制单元还包括:激光器,所述激光器固定设置在所述喷漆枪的前端,所述控制模块还用于控制所述激光器的启停,所述激光器与所述控制模块电连接。
进一步地,所述储漆罐至少为两个,所述喷漆部还包括供料阀,所述供料阀为电磁阀,所述供料阀数量与所述喷漆罐数量相同,所述供料阀一端与所述喷漆罐连通,所述供料阀另一端与所述气枪进漆口连通,所述控制器还用于根据来自所述通信模块的指令控制所述供料阀的开闭,所述供料阀与所述控制模块电连接。
进一步地,所述动力履带底盘包括:底盘本体、行走动力装置、驱动轮、张紧轮以及履带,所述驱动轮以及所述张紧轮分别与所述底盘本体转动连接,所述行走动力装置与所述驱动轮传动连接,所述履带依次绕过所述驱动轮以及所述张紧轮,所述行走动力装置停止转动时自锁定。
进一步地,所述行走动力装置为伺服电机或步进电机,所述控制模块还用于根据来自所述通信模块的命令控制所述行走动力装置的启停,所述行走动力装置与所述控制模块电连接。
进一步地,所述履带材质为塑料或橡胶。
本发明的积极效果如下:
一种风力发电机组塔筒外壁补漆机器人,其包括:行走部、打磨部以及喷漆部;
本发明补漆机器人设有动力履带底盘,履带上设有磁铁,补漆机器人整体依靠磁铁的吸附力吸附到塔筒上,无需其它固定、稳固措施,安装方式简单;本发明补漆机器人设有打磨部和喷漆部,补漆部设有机械臂,在机械臂带动下对需要打磨的部位进行打磨,去除表面的污渍、锈蚀后,再通过喷漆部补漆,补漆的效果好,能够保证喷漆的漆面附着力度,起到好的防锈蚀作用。
本发明补漆机器人设有控制部,控制部通过摄像头捕捉塔筒外表面的图像,并将图像传输到终端,作业人员在终端查看图像,根据捕获的图像进行作业,工作人员远离作业现场,还能够对现场情况实现一目了然,作业更安全,补漆效果更有保证。
本发明补漆机器人的喷漆部在电动气泵提供的气源下将储漆罐中的油漆通过气枪喷涂到塔筒外壁上,喷漆采用气源喷涂,喷涂均匀;喷漆阀为电磁阀,在控制模块的控制下开闭,在需要喷漆是,喷漆阀打开,对目标区域进行喷漆,控制模块还控制打磨电机机械臂电机,结合摄像头捕获的图像作业人员可以远程操控补漆机器人,作业人员远离高空,作业更安全。
本发明机器人的激光器用于定位喷漆枪的喷漆中心位置,激光器照度高,作业人员通过摄像头捕获的图像可以快速定位到喷漆的中心位置,减少喷漆浪费。
本发明补漆机器人设有至少两个喷漆罐以及与喷漆罐数量相同的供料阀,通过供料阀的开闭实现对目标区域分别补漆,两个喷漆罐可以在补漆机器人移动到一个位置后,交替作业,减少了补漆机器人移动的过程,作业效率大幅提高。
本发明补漆机器人的动力履带底盘的行走动力装置具备自锁能力,可以在停止行进时锁定,防止因补漆机器人在存在高差的区域产生溜车现象,行走动力装置为步进电机或伺服电机,步进电机或伺服电机能够实现自锁,且速度、行进距离均可精准控制,作业人员更容易操控,方便作业人员快速抵达目标区域。
附图说明
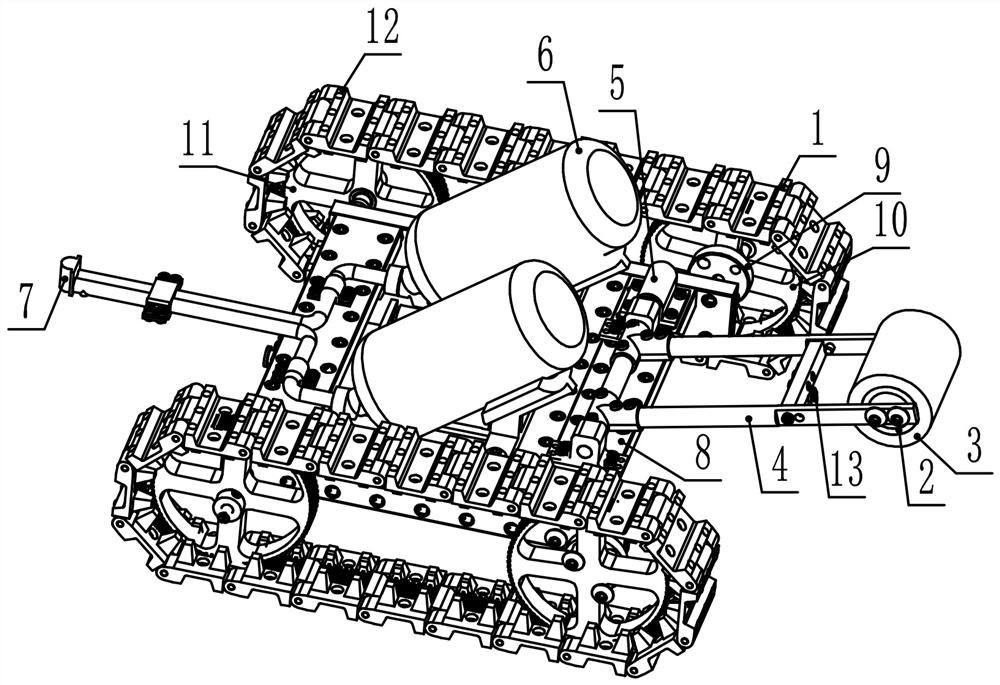
图1为本发明实施方式补漆机器人第一立体图;
图2为本发明实施方式补漆机器人第二立体图;
图3为本发明实施方式补漆机器人第三立体图;
图4为本发明实施方式控制部功能框图。
图中:
1磁铁;
2打磨电机;
3滚筒;
4机械臂;
5机械臂电机;
6储漆罐;
7气枪;
8底盘本体;
9行走动力装置;
10驱动轮;
11张紧轮;
12履带;
13摄像头。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施方式仅用以解释本发明,并不用于限定本发明。
如图1-4所示,一种风力发电机组塔筒外壁补漆机器人,包括:行走部、打磨部以及喷漆部;
所述行走部包括:动力履带底盘以及磁铁1,所述磁铁1固定设置在所述履带12接地面;
所述打磨部包括:打磨电机2、滚筒3、机械臂4以及机械臂电机5,所述滚筒3与所述机械臂4前端转动连接,所述打磨电机2与所述滚筒3传动连接;所述机械臂4后端与所述动力履带底盘上表面铰接,所述机械臂电机5与所述机械臂4传动连接;
所述喷漆部固定设置在所述动力履带底盘的上表面。
更为具体地,本发明补漆机器人通过履带12行走在需要补漆的发电机组的塔筒外壁上,在履带12的接地侧设有磁铁1,利用磁铁1对塔筒外壁的吸力吸附在发电机组的塔筒外壁上。该机器人行走时,打磨部的机械臂4举升,滚筒3远离塔筒,不对塔筒进行打磨,当需要对塔筒打磨时,机械臂电机5带动机械臂4落下,打磨电机2带动滚筒3转动,滚筒3对塔筒打磨。
本发明补漆机器人还设有喷漆部,当对塔筒打磨完成后,操作喷漆部对需要补漆的部位进行补漆。
本发明补漆机器人设有动力履带底盘,履带12上设有磁铁1,补漆机器人整体依靠磁铁1的吸附力吸附到塔筒上,无需其它固定、稳固措施,安装方式简单;本发明补漆机器人设有打磨部和喷漆部,补漆部设有机械臂4,在机械臂4带动下对需要打磨的部位进行打磨,去除表面的污渍、锈蚀后,再通过喷漆部补漆,补漆的效果好,能够保证喷漆的漆面附着力度,起到好的防锈蚀作用。
进一步地,还包括:控制部,所述控制部包括:控制模块、摄像头13以及通信模块,所述摄像头13用于采集塔筒外壁图像信号,所述控制模块用于将图像信号通过所述通信模块转发到外部终端。
更为具体地,一种常见的实施方式终端为平板或手机,通信模块为GPRS通信模块,在平板或手机上设有配套的应用软件,在应用软件上查看来自摄像头13捕获的图像,摄像头13通常至少为两个,分别用于观测打磨部的工作情况和喷漆部的工作情况。
本发明补漆机器人设有控制部,控制部通过摄像头13捕捉塔筒外表面的图像,并将图像传输到终端,作业人员在终端查看图像,根据捕获的图像进行作业,工作人员远离作业现场,还能够对现场情况实现一目了然,作业更安全,补漆效果更有保证。
进一步地,还包括:所述喷漆部包括:电动气泵、储漆罐6、气枪7以及喷漆阀,所述喷漆阀一端与所述电动气泵的出气口连通,所述喷漆阀另一端与所述气枪7的进气口连通,所述储漆罐6与所述气枪7的进漆口连通。
进一步地,所述喷漆阀为电磁阀,所述控制模块还用于根据来自所述通信模块的指令控制所述喷漆阀的开闭,所述控制模块还用于根据来自所述通信模块的指令控制所述打磨电机2和/或所述机械臂电机5的启停;所述喷漆阀、所述打磨电机2以及所述机械臂电机5分别与所述控制模块电连接。
更为具体地,本发明补漆机器人的喷漆部在电动气泵提供的气源下将储漆罐6中的油漆通过气枪7喷涂到塔筒外壁上,喷漆采用气源喷涂,喷涂均匀;喷漆阀为电磁阀,在控制模块的控制下开闭,在需要喷漆是,喷漆阀打开,对目标区域进行喷漆,控制模块还控制打磨电机2机械臂电机5,结合摄像头13捕获的图像作业人员可以远程操控补漆机器人,作业人员远离高空,作业更安全。
进一步地,所述控制单元还包括:激光器,所述激光器固定设置在所述喷漆枪的前端,所述控制模块还用于控制所述激光器的启停,所述激光器与所述控制模块电连接。
更为具体地,本发明机器人的激光器用于定位喷漆枪的喷漆中心位置,激光器照度高,作业人员通过摄像头13捕获的图像可以快速定位到喷漆的中心位置,减少喷漆浪费。
进一步地,所述储漆罐6至少为两个,所述喷漆部还包括供料阀,所述供料阀为电磁阀,所述供料阀数量与所述喷漆罐数量相同,所述供料阀一端与所述喷漆罐连通,所述供料阀另一端与所述气枪7进漆口连通,所述控制器还用于根据来自所述通信模块的指令控制所述供料阀的开闭,所述供料阀与所述控制模块电连接。
更为具体地,喷漆罐通常为两个,分别通过供料阀与气枪7的进漆口连通,一种实施方式为,一个喷漆罐为底漆罐,另一个为面漆罐,在需要喷底漆时,控制模块控制底漆罐一侧供料阀打开,面漆罐一侧的供料阀关闭,对目标区域喷漆。
本发明补漆机器人设有至少两个喷漆罐以及与喷漆罐数量相同的供料阀,通过供料阀的开闭实现对目标区域分别补漆,两个喷漆罐可以在补漆机器人移动到一个位置后,交替作业,减少了补漆机器人移动的过程,作业效率大幅提高。
进一步地,所述动力履带底盘包括:底盘本体8、行走动力装置9、驱动轮10、张紧轮11以及履带12,所述驱动轮10以及所述张紧轮11分别与所述底盘本体8转动连接,所述行走动力装置9与所述驱动轮10传动连接,所述履带12依次绕过所述驱动轮10以及所述张紧轮11,所述行走动力装置9停止转动时自锁定。
进一步地,所述行走动力装置9为伺服电机或步进电机,所述控制模块还用于根据来自所述通信模块的命令控制所述行走动力装置9的启停,所述行走动力装置9与所述控制模块电连接。
进一步地,所述履带12材质为塑料或橡胶。
更为具体地,本发明补漆机器人的动力履带底盘的行走动力装置9具备自锁能力,可以在停止行进时锁定,防止因补漆机器人在存在高差的区域产生溜车现象,行走动力装置9为步进电机或伺服电机,步进电机或伺服电机能够实现自锁,且速度、行进距离均可精准控制,作业人员更容易操控,方便作业人员快速抵达目标区域。履带12通常为塑料履带12,塑料履带12具有耐腐蚀,对塔筒外壁伤害小,重量轻的特点。
以上实施方式仅为本发明的优选实施例,而并非本发明可行实施的穷举。对于本领域一般技术人员而言,在不背离本发明原理和精神的前提下对其所做出的任何显而易见的改动,都应当被认为包含在本发明的权利要求保护范围之内。
- 风力发电机组塔筒外壁补漆机器人
- 风力发电机组叶片补漆机器人