橄榄球训练发球装置
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及机器人领域,尤其是涉及可完成夹取和发射橄榄球,结构整体可移动,自主性强的一种橄榄球训练发球装置。
背景技术
随着社会的发展,人们的生活水平逐渐提高,愈发重视体育运动对生活质量的积极影响,球类运动占据了人们生活的一部分,从古时候的蹴鞠到现在的足球、篮球、橄榄球各种球类运动都受到了人们的喜爱,甚至已经形成国内国际赛事,成为衡量国家体育运动水平的标准之一,在参加比赛之前,运动员们需要做很多的锻炼,但一些项目需要多人配合,这就会造成个人训练不便。随着人工智能技术、计算机技术等相关技术的发展,可代替人力的工具也越来越多。运动赛事也一样,于是各种不同的训练装置应运而生。
中国专利CN201020272984.6公开一种橄榄球发球器,包括有壳体和设置于壳体中的发射装置;该发射装置至少包括有两滚轮,该两滚轮间距并排设置,于两滚轮之间形成有一发球通道,于该发球通道的后方设置有一用于推动橄榄球朝向发射装置移动的送球滑座;以及,针对滚轮设置有用于促使滚轮转动的驱动机构;藉此,通过于壳体内设置有发射装置,利用该发射装置之两滚轮之间形成有发球通道,以及于该发球通道的后方设置有送球滑座,利用该送球滑座将橄榄球送入发球通道中,并利用两滚轮高速转动摩擦橄榄球的两侧,以此使橄榄球绕自身旋转而发射出壳体外,从而实现了橄榄球自动发球功能。
中国专利CN201920679423.9公开一种橄榄球钩球定位发球器,在机架的前端设有球仓,球仓的两侧和后端采用球仓栏板围成;球仓的前端设有仓门翻板,仓门翻板的转轴与机架铰链连接;在球仓的顶部设有可滑动的推切球板与运球滑槽连通;在球仓的后板处开设有通道,弹射发球装置的发射杆穿过通道插入到球仓内并与推切球板连接;其中仓门翻板、推切球板和弹射发球装置的发射杆与联动机构连接,实现同步运行。
发明内容
本发明的目的在于提供可完成夹取和发射橄榄球,结构整体可移动,自主性强,实现橄榄球训练的一种橄榄球训练发球装置。
本发明包括底盘单元、夹取单元和发射单元;
所述底盘单元包括底盘框架、全向轮和第一电机;所述全向轮设有4个,4个全向轮均布设于底盘的四周,第一电机连接全向轮;
所述夹取单元设于底盘单元上方,夹取单元包括夹取模块、旋转驱动模块和水平移动模块;所述旋转驱动模块两侧的铝条上端与固定夹取后板的铝条连接,夹取后板上有左右各两个空隙轨道,所述夹取模块的两个夹取平板伸长端与夹取后板配合,在其空隙内移动,旋转驱动模块两侧铝条下端与第一主轴固定,第一主轴带动旋转驱动模块完成旋转动作,所述水平移动模块两侧的铝条与第一主轴相配合,水平移动模块即可带动旋转驱动模块和夹取模块完成水平方向上的运动;
所述发射单元设于底盘单元上方,发射单元包括发射模块、推射动力模块和角度调节模块;所述发射模块包括发射框架,在发射框架内侧两边固定有一定长度的滑轨,所述推射动力模块包括推射框架,在推射框架外侧两边各固定有两个滑块,滑块与发射模块的滑轨配合,推射动力模块把球以一定姿态推给发射模块完成球的发射动作,所述角度调节模块的一支柱一端连接于发射框架下端,支柱另一端连接丝杆上的动力块,底盘上固定有丝杆动力装置,通过动力块在丝杆上的移动来调节发射单元的发射角度。
所述夹取模块是由两个夹球平板在夹球后板的空隙轨道中移动完成夹球动作的,动力装置为第一气缸,夹球后板起控制夹球平板水平移动和限制水平移动范围的作用,夹球平板上配有曲面夹球板,以适应橄榄球的曲面,夹球平板的后端有凸出段,控制夹球平板可以在夹球后板中移动,一个夹球平板的后端突出段连接第一气缸,一个夹球板与夹球后板的不同距离的空隙配合,以最初调整空隙,适应橄榄球的大小。
所述旋转驱动模块的动力装置为第二电机和同步带轮,大带轮固定在第一主轴上作为从动轮,小带轮固定在第二电机上作为主动轮,小带轮左上侧另有一轮作为张紧轮,控制皮带的压力使其保持正常工作而不至打滑,通过皮带传动使夹取框架旋转,旋转驱动模块安装有限位装置,分为上下两个限位部分,上限位部分在水平移动的框架上,下限位部分在底盘上,防止夹取模块在旋转向下时对其他模块的产生撞击。
所述水平移动模块包括齿轮、齿条、第三电机和滑块滑轨,齿条固定于底盘支架上,齿轮固定于第三电机上并与齿条啮合,第三电机带动齿轮旋转,在齿条上移动,夹取单元框架在底盘滑轨上移动,从而带动水平移动模块框架的移动。
所述水平移动模块框架在滑轨上运动时,两侧可设有护栏,以使水平移动模块框架保持竖直,也起到支撑的作用。
所述发射模块由两个摩擦动力轮和两个辅助正位轮组成,推射动力模块推球进入辅助正位轮,使球姿态稳定,再进入摩擦动力轮完成球的发射动作;摩擦动力轮的电机为高速电机,辅助正位轮为低速电机;摩擦动力轮的距离是通过恒力弹簧进行调节的。
所述发射模块的框架下方为流利条,辅助球在框架内的滑动。
所述推射动力模块为U型框架,框架两边外侧各固定两个滑块在发射框架内部滑动,U型框架后端固定有推球挡板,U型框架底部一固定板与第二气缸伸出端相连,第二气缸固定于发射框架上,气缸提供动力使推射动力模块工作。
所述角度调节模块包括动力块、第四电机和丝杆,发射框架通过一支柱与动力块连接,第四电机转动带动丝杆转动,使丝杆上的动力块水平运动,支柱下端位置改变,从而改变发射单元的发射角度。
所述底盘单元还可包括自定位模块,所述自定位模块设于底盘四方框架结构的底部,自定位模块包括两个互相垂直的从动轮,从动轮上安装有用于定位的陀螺仪和编码器。
与现有技术相比,本发明取得的有益效果是:
1、本发明采用全向轮,整体结构可以向任意方向自由移动,并有减震的功能,可承受的力较大,环境适应性和实用性强,可适用于不同情况;
2、本发明设有自定位模块,可以有效确定整体结构所处位置;
3、本发明可以在大范围内夹取橄榄球;
4、本发明也可以完成除橄榄球以外其他球类物体的夹取和发射;
5、本发明夹取结构采用第一气缸固定物体,发射部分可用丝杆调节角度,第二气缸将物体推出,可以使球体以不同速度抛出,操作简单,快速高效;
6、本发明同时包含移动、夹取、发射功能,可适应多种工作类型和环境;
7、本发明机械结构简单清晰可见,易于操作、运行速度快、效率高,可适应教学实验与机器人培训与竞赛等活动;
8、本发明成本低廉,可大批量生产并投入使用。
附图说明
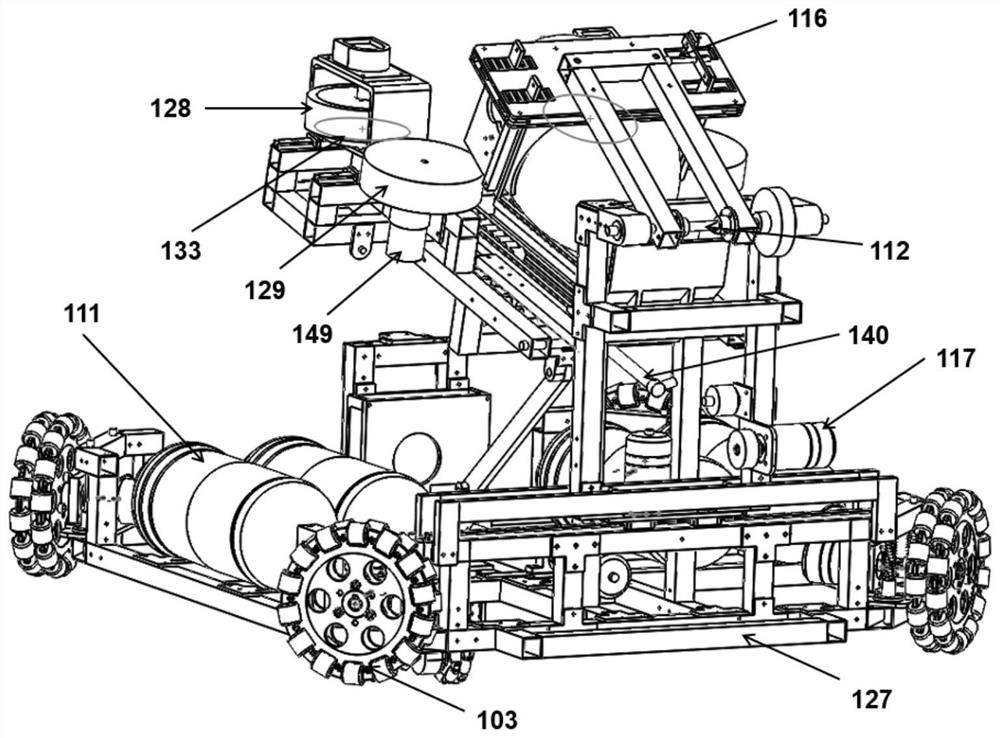
图1为本发明的整体结构示意图之一;
图2为本发明的整体结构示意图之二;
图3为底盘单元的结构示意图;
图4为全向轮和第一电机连接的结构示意图;
图5为从动轮模块的结构示意图;
图6为夹取单元的结构示意图;
图7为夹取模块的结构示意图;
图8为旋转驱动模块的结构示意图;
图9为水平移动模块的结构示意图;
图10为发射单元结构示意图;
图11为发射模块的结构示意图;
图12为摩擦动力轮结构示意图;
图13为推射动力模块的结构示意图;
图14为辅助正位轮结构示意图;
图15位发射单元完整示意图;
图16为角度调节模块的结构示意图;
图17为控制平台妙算与视觉组装盒的结构示意图;
图18为底盘减震的结构示意图。
图中各标记为:第一电机101,电机座102,全向轮103,全向轮轴104,联轴器105,底盘框架106,自定位模块107,弹簧108,减震模块短轴109,铝管110,气瓶111,第一主轴112,夹球后板113,夹球平板114,曲面夹球板115,第一气缸116,第二电机117,大带轮118,小带轮119,张紧轮120,第三电机121,齿轮122,齿条123,滑轨124,铝条护栏125,上限位铝条126,下限位铝条127,摩擦动力轮128,辅助正位轮129,流利条130,恒力弹簧131,摩擦轮模块短轴132,高速电机133,发射模块编码器134,摩擦轮半包壳135,推球挡板136,铝条滑块连接件137,推射固定板138,气缸固定件139,第二气缸140,角度调节支柱141,动力块142,丝杆143,弹簧联轴器144,发射框架145,橄榄球146,控制平台妙算组装盒147,视觉安装片148,低速电机149,固定夹片150,第四电机151,轴承座152,从动轮153,自定位模块编码器154,滑块155,铝条156,挡块157。
具体实施方式
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚、明白,以下结合附图和实施例,对本发明做进一步详细说明。
如图1~18所示,本发明实施例包括底盘单元、夹取单元、发射单元。
所述底盘单元包括底盘框架106、全向轮103、第一电机101、自定位模块107、气瓶111。
所述底盘框架106上安装有电池和电路板等供电和控制套件(图中未画出),下方安装自定位模块107;所述电池用于对整车进行供电;各个电路板模块用于控制第一电机101、第二电机117、第三电机121、第四电机151、高速电机133、低速电机149、第一气缸116、第二气缸140和自定位模块107;所述自定位模块107用于确定和调整车的位置。
如图3和图4所示,所述全向轮103设有4个,全向轮103均布设于底盘框架106的四周,第一电机101驱动全向轮103,使机器人整体移动,全向轮103可以向各个不同的方向运动,使整体结构灵活易移动;本实施例采用四轮结构,移动时更稳定;具体地,电机座102将第一电机101固定在底盘框架106上,联轴器105连接电机轴和全向轮轴104,联轴器夹片用螺栓与联轴器105一同固定。
如图3和5所示,所述自定位模块设于底盘框架106的底部,自定位模块包括两个互相垂直的从动轮153,采用玻纤材料的固定夹片将自定位模块107固定在底盘框架106上,自定位模块107上安装有用于定位的陀螺仪和编码器154,两个互相垂直的从动轮分别负责测定x轴和y轴,编码器根据轮子的转动来计算走过的路程,再通过陀螺仪的数值的返回来消除编码器产生的误差值,从而得出机器人所在的位置,进行定位。
如图1所示,所述气瓶模块包含4个气瓶111,为夹取单元和发射单元的气缸供气;气瓶111固定在铝制底盘框架106上。
如图1和6所示,所述夹取单元设于底盘框架106上方,夹取单元包括夹取模块、旋转驱动模块和水平移动模块。
如图6和7所示,所述夹取模块包括第一气缸116、夹球平板114、夹球后板113、曲面夹球板115、固定铝条;具体的,所述夹取模块的两个夹球平板114伸长端与夹球后板113配合,一端在夹取后板空隙内可自由移动,一端在有距离限制的空隙中固定,夹球后板113分为前后两片板,前后两片板之间有中间大连接片和四角小连接片,为了增大连接后板的厚度,增大夹球平板114伸长端在后板空隙中的移动接触面积,并减轻重量,使夹球结构更加稳定。
如图6和7所示,所述第一气缸116用螺栓固定于与夹球后板113连接的铝条中,第一气缸活塞杆前段螺纹处与夹球平板伸长端的连接板连接,当气缸运动时,即可带动夹球平板114运动;所述夹球平板114上与曲面夹球板115用螺栓固定,曲面夹球板115随夹球平板114在第一气缸116的带动下完成夹球动作,采用气缸,使控制更为简单,可以用气阀控制夹取速度,运行速度快,大大提高效率。
如图6和8所示,所述旋转驱动模块包括第二电机117、第一主轴112、大带轮11、小带轮119、张紧轮120、固定铝条;具体的,所述旋转驱动模块中的第一主轴112与固定夹取后板113的铝条用法兰盘连接;第一主轴112上固定有大带轮118作为从动轮,小带轮119在第二电机117的带动下旋转,作为主动轮;小带轮119左上侧另有一轮为张紧轮120,用于控制皮带的压力使其保持正常工作而不至打滑,第二电机117旋转带动小带轮119旋转,小带轮119通过皮带带动大带轮118旋转,大带轮118固定于第一主轴112上,夹取模块也固定于第一主轴112上,即可带动夹取框架一起旋转,采用带传动,使其结构简单,传动平稳,可以在大的轴间距和多轴间传递动力,且其造价低廉,不需要润滑,也容易维护。
如图1和6所示,所述旋转驱动模块安装有限位装置,分为上下两个限位部分,上限位铝条126在水平移动的框架上,下限位铝条127在底盘上,用于防止夹取模块在旋转向下时对其他模块的产生撞击。
如图6和9所示,所述水平移动模块包括第三电机121、齿轮122、齿条123、滑轨124、固定铝条;具体的,所述水平移动模块的传动方式为齿轮齿条,齿条123固定于底盘框架106的上方铝条上,齿轮122固定于第三电机121上并与齿条123啮合,夹取框架两侧铝条下方连接一玻纤平板,玻纤平板上与滑块固定,滑块与滑轨配合,第三电机121带动齿轮122旋转,在齿条123上移动,夹取单元框架在底盘滑轨上移动,从而带动水平移动模块的框架的移动,使夹取球的水平范围更加宽阔,便于调整位置,准确夹取球体,采用齿轮齿条的结构,也可减小电机所受力矩,增长电机使用寿命,防止电机烧坏。
如图6所示,水平移动模块的框架在滑轨上运动时,两侧有铝条护栏125,使水平移动模块的框架保持竖直,也起到了支撑的作用。
如图1和图15所示,所述发射单元设于底盘上方,发射单元包括发射模块、推射动力模块和角度调节模块。
如图10~15所示,所述发射模块大体为矩形发射框架145,由两个摩擦动力轮128,两个辅助正位轮129,流利条130,高速电机133,低速电机149,滑轨124,固定铝条组成;具体的,摩擦动力轮128固定在高速电机133上,位于发射框架145的前端,辅助正位轮129固定在低速电机149上,位于摩擦动力轮的后方,推射动力模块推球进入速度缓慢的辅助正位轮129,使球姿态稳定,再进入高速旋转的摩擦动力轮128完成橄榄球的发射动作。
如图11和图12所示,所述摩擦动力轮模块包括摩擦动力轮128、恒力弹簧131、摩擦轮模块短轴132、高速电机133、发射模块编码器134、摩擦轮半包壳135、滑轨124、滑块155、挡块157和固定铝条;具体的,高速电机133带动摩擦动力轮128旋转,固定于摩擦轮半包壳135中,摩擦轮半包壳上端安装发射模块编码器134,发射模块编码器134用于测量高速电机133的角位移,摩擦轮半包壳下端安装滑块155,滑块155与滑轨124配合固定于铝条上,滑轨端部固定有挡块157,防止摩擦动力轮模块脱轨,下方铝条两侧安装夹片,夹片固定摩擦轮模块短轴132,摩擦轮模块短轴上套有恒力弹簧131,恒力弹簧自由端绕过铝条156与摩擦轮半包壳135下方连接,通过恒力弹簧抵抗负载力,调节橄榄球通过时摩擦轮动力轮之间的距离,完成橄榄球的发射。
如图14所示,所述辅助正位轮模块包括辅助正位轮129、低速电机149、固定夹片150;具体的,辅助正位轮129安装在低速电机149上,低速电机安装于固定夹片150上,固定夹片又与矩形发射框架相连,低速电机带动辅助正位轮低速旋转,使进入发射框架的球姿态稳定,更好完成发射动作。
如图10和11所示,所述发射模块的发射框架145下方为流利条130,辅助球在框架内的滑动。在图10中,标记146为橄榄球。
如图13所示,所述推射动力模块大体为U型推射框架,由推球挡板136、铝条滑块连接件137、推射固定板138、气缸固定件139、第二气缸140、滑轨124、滑块155、固定铝条组成;具体的,所述U型框架后端铝条与推球挡板136用螺栓固定,两侧铝条下端与铝条滑块连接件137固定,铝条滑块连接件下端固定有推射固定板138,连接件外侧两边各固定有两个滑块155,滑块155与固定在发射框架内侧的滑轨124配合,完成在发射框架内的移动。
如图13所示,所述推射固定板138下端与气缸固定件139连接,第二气缸140活塞杆螺纹处与气缸固定件139连接,第二气缸缸筒固定于发射框架底部铝条上,当汽缸运动时,即可带动推射框架的运动,使落于推射框架中的球可以被推到发射机构,完成发射。
如图15和图16所示,所述角度调节模块包括角度调节支柱141、动力块142、丝杆143、弹簧联轴器144、第四电机151、轴承座152、固定铝条;具体的,发射框架145通过角度调节支柱141与动力块142连接,角度调节支柱可在平面内转动,第四电机151通过电机座102固定于底盘上,丝杆143通过弹簧联轴器144与电机连接,穿过轴承座152固定于底盘上,动力块与丝杆配合,第四电机转动时,带动丝杆转动,使丝杆上的动力块水平运动,支柱下端位置改变,从而改变发射单元的发射角度。
如图1和17所示,控制平台妙算组装盒147通过铝条安装于底盘框架106上,用于安装妙算,使车的运行状况更为准确的返回,铝条上方有视觉安装片148,视觉安装片148上安装摄像头,通过视觉确定整车所处的周围环境和判断球的位置。
如图4和图18所示,底盘四周全向轮设有弹簧减震结构,电机座102通过螺栓固定于一玻纤板上,玻纤板通过两个法兰盘与两根减震模块短轴109固定,玻纤板与底盘铝条中间安装有两个弹簧108,通过弹簧的弹力作用使全向轮在经过恶劣路面时不打滑。在图18中,标记110为铝管。
本实施例中,内部结构连接处多使用螺栓螺母和焊接连接,某些部位为了结构精密使用夹片固定。本实施例,机器人长度与宽度范围均在800mm以内,伸展时在1000mm以内。
本发明的工作原理如下:
所述夹取单元通过底盘框架106的移动接近所要夹取球的周围,通过第三电机121带动齿轮在齿条上移动,调整夹取框架的位置位于要夹取球的上方,再通过第二电机117带动小带轮旋转,通过带传动使夹取模块翻转一定角度,第一气缸116打开,使夹取结构把球包住,气缸收缩,完成夹球动作,再翻转回去,把球放置于发射框架上;所述发射单元接收来自于夹取单元传递的球,通过第四电机151带动丝杆旋转,调整发射框架的角度,再通过第二气缸140把球推到辅助正位轮中,调整好球的姿态后,进入摩擦动力轮,完成发射。
- 橄榄球训练发球装置
- 一种可对高度进行调节的橄榄球自动发球装置