基于相空间重构的自动驾驶汽车深度神经网络预测模型系统及建立方法
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及自动驾驶汽车应用技术领域,尤其涉及一种基于相空间重构的自动驾驶汽车深度神经网络预测模型系统及建立方法。
背景技术
自动驾驶汽车是计算机、自动化和人工智能互相交叉结合的高新科技产品,有望能够像人类驾驶员一样熟练和安全驾驶,这将减少对人类驾驶员的需求,并显著降低移动成本。自动驾驶汽车需要适应各种复杂的条件,包括在湿滑、低摩擦路面上的行驶,在曲折多变的道路上行驶,或在必要时进行紧急避障操作,以满足稳定、安全和舒适等多种需求。
自动驾驶汽车是机器人驾驶员和车辆的结合体,它应该具有有人驾驶汽车相似的运动特性,以增强普通驾驶员把它作为道路上伙伴的信心。人类安全驾驶的重要原因在于基于车辆当前的运行状态,对未来状态有良好的预测能力,自动驾驶汽车同样需要具有相似的特征,这就要求建立自动驾驶汽车预测模型。预测模型的建立将使规划和控制紧密结合,从而进一步提高自动驾驶汽车的整体性能。然而车辆动力学存在延时效应和时间依赖性,其中延时效应存在于输入变量和输出变量之间以及输入变量的各参数之间,时间依赖性则表现为输入和输出变量时序数据的联系性,在它们共同作用下,产生了相空间扭曲效应,而且这种效应随着车辆运动非线性程度的增加而加强。如何在相空间扭曲效应下建立自动驾驶汽车预测模型,成为当前亟需解决的重要难题。
发明内容
为解决上述技术问题,本发明提供一种基于相空间重构的自动驾驶汽车深度神经网络预测模型系统及建立方法,首先基于相空间重构理论,建立历史序列信息输入和未来序列信息输出的车辆动力学相空间重构模型;接着收集和存储包括典型驾驶工况和典型道路情况的真实车辆驾驶数据,所述的典型驾驶工况包括:直线行驶、弯道行驶、环形行驶、S形行驶和紧急避障行驶,所述的典型道路情况包括:高摩擦路面和低摩擦路面;然后使用平均互信息方法计算典型驾驶工况下驾驶数据序列的延时互信息,选取车辆动力学相空间重构模型中的预测维数;再使用虚假最近邻方法计算各典型驾驶工况下驾驶数据序列随嵌入维数变化的虚假最近邻,选取车辆动力学相空间重构模型中的嵌入维数和每个时步的延迟时间;最后,基于以上选取的预测维数、嵌入维数、每个时步的延迟时间共3个参数,构造深度神经网络学习车辆动力学相空间重构模型的映射关系,并进行深度神经网络学习效果的测试和验证。
本发明基于相空间重构的自动驾驶汽车深度神经网络预测模型系统的技术方案是:包括车辆动力学相空间重构模型VDPSRM,真实车辆驾驶数据收集和存储模块RVDDM,虚假邻近点计算模块FNNCM,平均互信息计算模块AMICM,深度神经网络模块DNNM。
所述车辆动力学相空间重构模型VDPSRM,是在平面单轨模型PSTM的基础上,在相空间重构理论框架下建立的理论模型,用于指导自动驾驶汽车深度神经网络预测模型的建立,包括重构的输入相空间、重构的输出相空间和重构映射,还包括下列重构参数:嵌入维数m、预测维数n、每个时步的延迟时间τ。
所述平面单轨模型PSTM:
式(1)是一个非线性耦合模型,包括的参数有:前轮到质心距离a、后轮到质心距离b、转动惯量I
式(2)中,f
引入相空间重构参数,在式(2)的基础上建立车辆动力学相空间重构模型VDPSRM:
式(3)中,{(X
所述真实车辆驾驶数据和存储模块RVDDM,包括轮胎六分力测量系统、S-Motion传感器、方向盘转角传感器和驾驶数据记录仪,收集并存储前轮纵向力F
所述虚假邻近点计算模块FNNCM,用于选择最小的嵌入维数m和每个时步的延迟时间τ,在m维相空间中,一维时间序列的坐标向量y(t)和r阶最近邻y
式(6)中,x(t+kτ)是坐标向量y(t)的k+1个元素,x
当增加到在m+1维相空间,欧式距离的平方变为:
当一维时间序列在m维相空间中尚未进行合适的嵌入时,坐标向量y(t)和r阶最近邻的欧式距离高于阈值R
对于N维时间序列,欧式距离平方的计算如下:
式(8)中,x
当N维时间序列在m维相空间中尚未进行合适的嵌入时,欧式距离高于阈值R
所述平均互信息计算模块AMICM,用于计算原始的时间序列和经过平移的时间序列之间的互信息。原始的第i时间序列x
式(4)中,p
则N维时间序列的平均互信息:
当平均互信息I
所述深度神经网络模块DNNM,用于实现重构的输入相空间到重构的输出相空间的重构映射。所述深度神经网络模块DNNM通过下式所描述神经元的组合结构来学习驾驶数据的输入输出关系,从而实现重构映射关系:
式(10)中,X
本发明提出了一种基于相空间重构的自动驾驶汽车深度神经网络预测模型的建立方法采用的技术方案包括如下步骤:
步骤1)对自动驾驶汽车进行简化等效,得到平面单轨模型PSTM;
步骤2)引入相空间重构参数,在平面单轨模型PSTM的基础上建立车辆动力学相空间重构模型VDPSRM,所述车辆动力学相空间重构模型VDPSRM包括重构的输入相空间、重构的输出相空间和重构映射;
步骤3)建立真实车辆驾驶数据收集和存储模块RVDDM,收集典型道路情况下的典型驾驶工况数据,所述典型道路情况包括:高摩擦路面和低摩擦路面,所述典型驾驶工况包括:直线行驶、弯道行驶、环形行驶、S形行驶和紧急避障行驶;
步骤4)使用虚假邻近点计算模块FNNCM求取最小嵌入维数m和对应的每个时步的延迟时间τ;
步骤5)使用平均互信息计算模块AMICM计算典型驾驶工况时间序列的平均互信息I
步骤6)基于重构参数:嵌入维数m、预测维数n、每个时步的延迟时间τ,构造深度神经网络模块DNNM实现重构的输入相空间到重构的输出相空间的重构映射G
本发明基于相空间重构理论,在平面单轨模型PSTM的基础上建立历史序列信息输入和未来序列信息输出的车辆动力学相空间重构模型VDPSRM,再建立真实车辆驾驶数据获取和存储模块RVDDM,用于收集和存储包括典型驾驶工况和典型道路情况的真实车辆驾驶数据,使用虚假最近邻计算模块FNNCM计算各典型驾驶工况下驾驶数据序列随延时的虚假最近邻,求取车辆动力学相空间重构模型中的嵌入维数m和每个时步的延迟时间τ,使用平均互信息计算模块AMICM计算各典型驾驶工况下驾驶数据序列的延时互信息,求取车辆动力学相空间重构模型中的预测维数n,构造深度神经网络模块DNNM学习车辆动力学相空间重构模型的重构映射G
本发明的有益效果:
1、本发明构建了自动驾驶汽车的车辆动力学相空间重构模型VDPSRM,在平面单轨模型PSTM的基础上,将自动驾驶汽车模型扩展到高维相空间,解决了自动驾驶汽车动力学模型的时空动态刻画问题;
2、本发明构建了真实车辆驾驶数据收集和存储模块RVDDM,为车辆动力学相空间重构模型中重构参数的获取提供基础依据;
3、本发明建立了车辆动力学相空间重构模型中重构参数的获取方法,使用平均互信息方法计算预测维数n,使用虚假邻近点方法计算嵌入维数m和每个时步的延迟时间τ,提高了车辆动力学相空间重构模型的实用性和科学性;
4、本发明构建了基于相空间重构的自动驾驶汽车深度神经网络预测模型建立方法和装置,构建了深度神经网络模块DNNM学习车辆动力学相空间重构模型的重构映射G
附图说明
图1是自动驾驶汽车的平面单轨模型PSTM简化等效图。
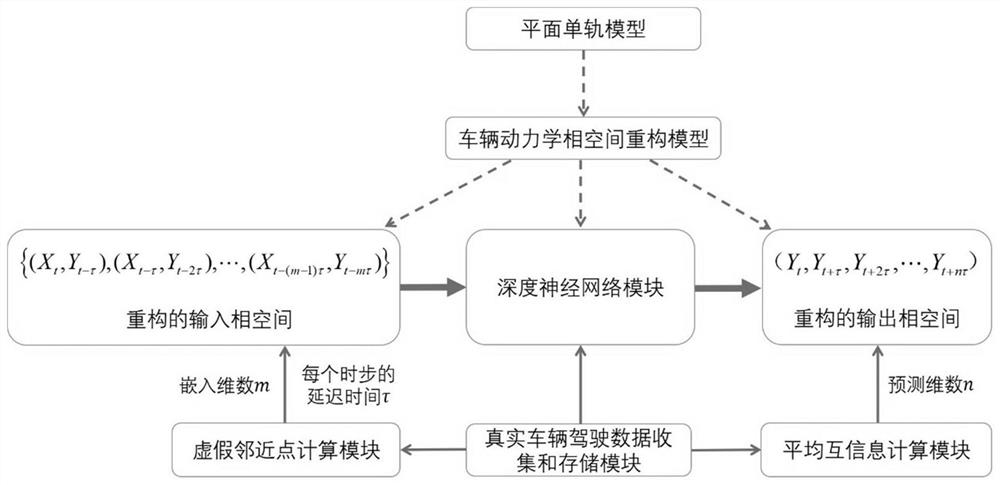
图2是自动驾驶汽车的车辆动力学相空间重构模型VDPSRM图。
图3是真实车辆驾驶数据收集和存储模块RVDDM图。
图4是重构参数求取流程图。
图5是基于相空间重构的自动驾驶汽车深度神经网络预测模型建立方法及装置图。
具体实施方式
下面结合附图对本发明作进一步说明。
如图1所示,第一步,自动驾驶汽车经过简化等效,建立平面单轨模型PSTM,这是一个非线性耦合模型,所述平面单轨模型PSTM包括的参数有:前轮到质心距离a、后轮到质心距离b、转动惯量I
如图2所示,车辆动力学相空间重构模型VDPSRM,在车辆动力学映射的基础上,引入相空间重构参数,建立车辆动力学相空间重构模型VDPSRM,其中,{(X
如图3所示,真实车辆驾驶数据收集和存储模块RVDDM,分别收集和存储包括高摩擦路面和低摩擦路面上的典型驾驶工况数据,所述典型驾驶工况包括:直线行驶、弯道行驶、环形行驶、S形行驶和紧急避障行驶;
如图4所示,重构参数求取流程,所述重构参数包括嵌入维数m、预测维数n、每个时步的延迟时间τ,求取流程分为两个方面:一方面,平均互信息计算模块AMICM从真实车辆驾驶数据收集和存储模块RVDDM获得典型驾驶工况数据,计算平均互信息I
如图5所示,基于相空间重构的自动驾驶汽车深度神经网络预测模型系统,包括车辆动力学相空间重构模型VDPSRM,真实车辆驾驶数据收集和存储模块RVDDM,平均互信息计算模块AMICM,虚假邻近点计算模块FNNCM,深度神经网络模块DNNM。
车辆动力学相空间重构模型VDPSRM,是在平面单轨模型PSTM的基础上,在相空间重构理论框架下建立的理论模型,用于指导自动驾驶汽车深度神经网络预测模型的建立,包括重构的输入相空间{(X
真实车辆驾驶数据收集和存储模块RVDDM,包括轮胎六分力测量系统、S-Motion传感器、方向盘转角传感器和驾驶数据记录仪,收集并存储前轮纵向力F
虚假邻近点计算模块FNNCM,接收来自真实车辆驾驶数据收集和存储模块RVDDM的典型道路情况下的典型驾驶工况数据,计算欧式距离平方并与阈值R
平均互信息计算模块AMICM,接收来自真实车辆驾驶数据收集和存储模块RVDDM的典型道路情况下的典型驾驶工况数据,计算平均互信息I
深度神经网络模块DNNM,接收来自真实车辆驾驶数据收集和存储模块RVDDM的驾驶数据,通过神经元的组合结构来学习驾驶数据的输入输出关系,从而实现重构映射关系:
最终形成的基于相空间重构的自动驾驶汽车深度神经网络预测模型系统,包括车辆动力学相空间重构模型VDPSRM,真实车辆驾驶数据收集和存储模块RVDDM,虚假邻近点计算模块FNNCM,平均互信息计算模块AMICM,深度神经网络模块DNNM。
一种基于相空间重构的自动驾驶汽车深度神经网络预测模型的建立方法,包括以下步骤:
步骤1)对自动驾驶汽车进行简化等效,得到平面单轨模型PSTM,再进一步简化为车辆动力学映射的方式;
步骤2)基于相空间重构理论,建立车辆动力学相空间重构模型VDPSRM,包括重构的输入相空间{(X
步骤3)建立真实车辆驾驶数据收集和存储模块RVDDM,收集典型道路情况下的典型驾驶工况数据,所述典型道路情况包括:高摩擦路面和低摩擦路面,所述典型驾驶工况包括:直线行驶、弯道行驶、环形行驶、S形行驶和紧急避障行驶,具体步骤为:
(A)在高摩擦路面上,收集和存储直线行驶、弯道行驶、环形行驶、S形行驶和紧急避障行驶的时间序列数据;
(B)在低摩擦路面上,收集和存储直线行驶、弯道行驶、环形行驶、S形行驶和紧急避障行驶的时间序列数据;
步骤4)使用虚假邻近点计算模块FNNCM求取最小嵌入维数m和对应的每个时步的延迟时间τ,具体步骤为:
(A)在m维相空间中,计算时间序列和r阶最近邻的欧式距离的平方;
(B)在m+1维相空间中,计算时间序列和r阶最近邻的欧式距离的平方;
(C)当欧式距离大于阈值R
步骤5)使用平均互信息计算模块AMICM计算典型驾驶工况时间序列的平均互信息I
(A)依次计算每一个典型驾驶工况时间序列和延时时间序列的互信息;
(B)计算所有时间序列互信息的平均互信息I
(C)根据平均延迟时间计算得到预测维数n;
步骤6)基于重构参数:嵌入维数m、预测维数n、每个时步的延迟时间τ,构造深度神经网络模块DNNM实现重构的输入相空间到重构的输出相空间的重构映射G
(A)构造深度神经网络模块DNNM结构;
(B)学习真实车辆驾驶数据收集和存储模块RVDDM中数据的输入输出映射关系;
(C)验证和测试深度神经网络模块DNNM的效果;
本发明的具体实施例:使用数学模型构成车辆动力学相空间重构模型VDPSRM,使用轮胎六分力测量系统、S-Motion传感器、方向盘转角传感器和驾驶数据记录仪构成真实车辆驾驶数据收集和存储模块RVDDM,使用MATLAB/Simulink编写虚假邻近点计算模块FNNCM和平均互信息计算模块AMICM,使用Python编写深度神经网络模块DNNM,在Pytorch框架中实现输入相空间到输出相空间的映射关系的学习、验证和测试,实现基于相空间重构的自动驾驶汽车深度神经网络预测模型系统及建立方法。
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技术所创的等效方式或变更均应包含在本发明的保护范围之内。
- 基于相空间重构的自动驾驶汽车深度神经网络预测模型系统及建立方法
- 基于混沌相空间重构的风电系统运行状态灰色预测系统及方法