多自由度电磁机器
文献发布时间:2023-06-19 12:02:28
相关申请的交叉引用
本申请要求于2020年1月29日提交的先前提交的印度临时专利申请第202011003913号的权益,该临时专利申请据此全文以引用方式并入本文。
技术领域
本发明整体涉及电磁机器,诸如电动机,并且更具体地涉及多自由度电磁机器。
背景技术
随着UAV(无人驾驶飞行器)、空运用无人机、机器人技术、办公自动化、智能柔性制造装配系统等领域的发展,开发多自由度(DOF)精密致动系统成为一种必要。按照惯例,依赖于多自由度运动的应用通常是通过为各轴线而使用单独的电动机/致动器来完成,这导致复杂的传动系统和相对较重的结构。
随着球形电动机的问世,已有人多次尝试用单个球形电动机组件来替换复杂的多自由度组件。典型的球形电动机是由中心球体组成,将可彼此正交放置的线圈缠绕于该中心球体上。该球体被为开口圆柱体的形式的多极磁体包围。线圈组件被轴向保持并经由例如金属柱维持在竖直位置。外圆柱体经由轴承由托架/框架保持,该轴承使得圆柱体能够围绕其轴线旋转。托架经由第二轴承进一步连接到线圈组件的金属柱,该第二轴承使得托架与圆柱体一起能够围绕一个或两个另外的轴线旋转。
遗憾的是,将球形电动机应用于某些应用诸如UAV和机器人技术的当前尝试已产生了若干球形电动机设计概念。遗憾的是,这些设计概念中的许多设计概念都存在某些缺点。例如,许多表现出相对有限的扭矩。这至少部分地归因于磁体与内部球形定子之间的相对大的气隙(部分地归因于绕组)和相对重的球形定子。当前概念还表现出相对高的绕组温度、相对复杂和耗时的绕组式样。
因此,需要多自由度电磁机器,与目前已知的球形电动机相比,该多自由度电磁机器至少表现出改善的生成扭矩、改善的热处理能力、改善的速度范围和更简单的线圈绕组构型。本发明至少解决这个需要。
发明内容
提供本发明内容以便以简化形式描述所选概念,这些概念在具体实施方式中进一步描述。本发明内容不旨在识别要求保护的主题的关键特征或基本特征,也不旨在用于帮助确定要求保护的主题的范围。
在一个实施方案中,多自由度电磁机器包括外壳、内壳、定子、多个定子绕组、音圈绕组、倾斜磁体、转子和多个转子磁体。外壳具有内表面、外表面和形成于该外壳中的内腔。内壳设置在外壳的内腔内并且被安装成相对于外壳围绕至少第一旋转轴线旋转。内壳具有内表面、外表面和形成于该内壳中的内腔,并且内壳为至少半球状形状。定子固定地安装在内壳内,并且具有多个径向向外延伸的定子极。定子绕组缠绕定子极,并且在通电时可操作以产生磁场。音圈绕组固定地耦接到外壳的内表面。倾斜磁体固定地耦接到内壳的外表面。转子旋转地安装在内壳内并且包围定子的至少一部分。转子可操作以相对于定子围绕垂直于第一旋转轴线的第二旋转轴线旋转,并且具有内表面和外表面。转子磁体耦接到转子的内表面。
在另一个实施方案中,多自由度电磁机器包括外壳、内壳、定子、多个定子绕组、音圈绕组、倾斜磁体、转子和多个转子磁体。外壳具有内表面、外表面和形成于该外壳中的内腔。内壳设置在外壳的内腔内并且被安装成相对于外壳围绕至少第一旋转轴线旋转。内壳具有内表面、外表面和形成于该内壳中的内腔,并且内壳为至少半球状形状。定子固定地安装在内壳内,并且具有多个径向向外延伸的定子极。定子绕组缠绕定子极,并且在通电时可操作以产生磁场。音圈绕组缠绕在内壳的外表面上。倾斜磁体固定地耦接到外壳的内表面。转子旋转地安装在内壳内并且包围定子的至少一部分。转子可操作以相对于定子围绕垂直于第一旋转轴线的第二旋转轴线旋转,并且具有内表面和外表面。转子磁体耦接到转子的内表面。
在另一个实施方案中,多自由度电磁机器包括外壳、内壳、转子、多个转子磁体、定子、多个定子绕组、音圈绕组和倾斜磁体。外壳具有内表面、外表面和形成于该外壳中的内腔。内壳设置在外壳的内腔内并且被安装成相对于外壳围绕至少第一旋转轴线旋转。内壳具有内表面、外表面和形成于该内壳中的内腔,并且内壳为至少半球状形状。转子旋转地安装在内壳内并且可操作以相对于内壳围绕垂直于第一旋转轴线的第二旋转轴线旋转,并且具有内表面和外表面。转子磁体耦接到转子的外表面。定子固定地安装到内壳的内表面并且包围转子的至少一部分。定子具有多个径向向内延伸的定子极。定子绕组缠绕定子极,并且在通电时可操作以产生磁场。音圈绕组固定地耦接到内壳的外表面。倾斜磁体固定地耦接到外壳的内表面。
此外,结合附图和前述背景技术,多自由度电磁机器的其他所期望的特征和特性根据后续具体实施方式和所附权利要求书将变得显而易见。
附图说明
下面将结合以下附图来描述本发明,其中相似数字表示相似元件,并且其中:
图1示出了多自由度电磁机器的一个实施方案的剖视平面图;
图2示出了图1所示的电磁机器的一部分的分解图;
图3示出了多自由度电磁机器的另一个实施方案的剖视平面图;
图4示出了图3所示的电磁机器的一部分的分解图;
图5示出了图3所示的多自由度电磁机器的另一个实施方案的剖视平面图;
图6示出了图3所示的多自由度电磁机器的平面图;
图7示出了多自由度电磁机器的另一个实施方案的剖视平面图;
图8示出了图7所示的电磁机器的一部分的分解图;
图9示出了图7所示的多自由度电磁机器的另一个实施方案的剖视平面图;
图10示出了图7和图9中所示的多自由度电磁机器中可能包括的定子的平面图;
图11示出了图7和图9中所示的多自由度电磁机器中可能包括的外壳和磁体的平面图;并且
图12示出了多自由度控制系统的功能框图。
具体实施方式
以下具体实施方式本质上仅是示例性的,并且不旨在限制本发明或本发明的应用和使用。如本文所用,词语“示例性”是指“用作示例、实例或例证”。因此,本文中描述为“示例性”的任何实施方案不一定被理解为比其他实施方案优选或有利。本文描述的所有实施方案是为使得本领域的技术人员能够制作或使用本发明而提供的示例性实施方案,而不限制由权利要求书限定的本发明的范围。此外,不旨在受前述技术领域、背景技术、发明内容或以下具体实施方式中呈现的任何明示或暗示的理论的约束。
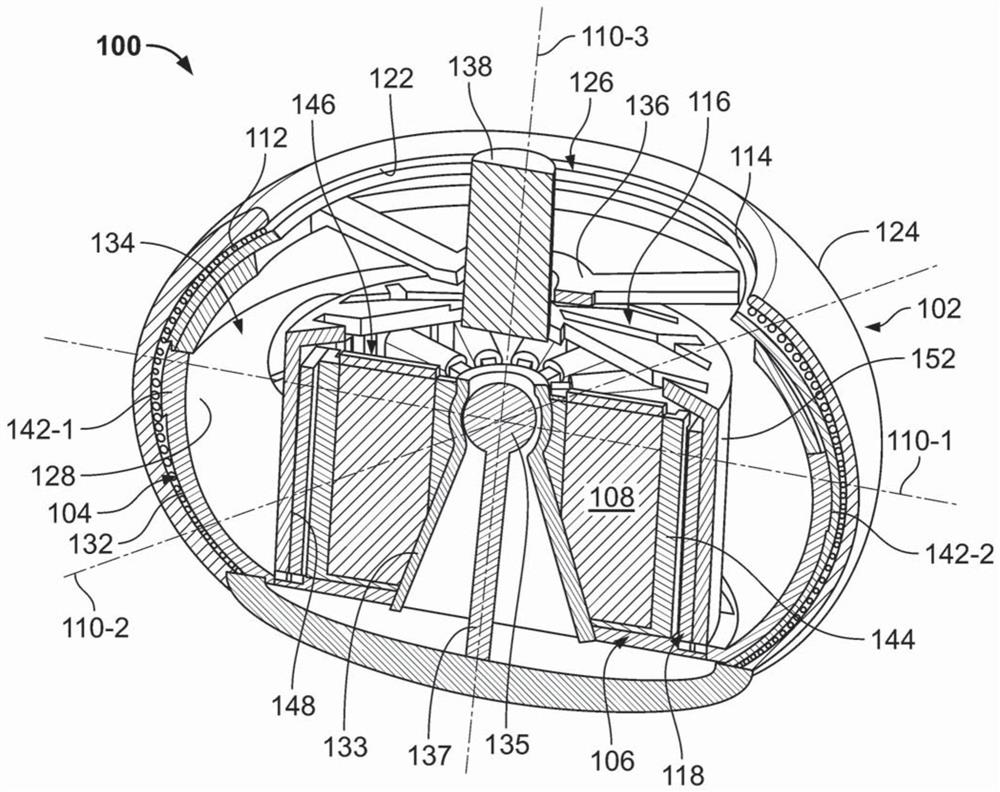
参见图1和图2,分别示出了多自由度电磁机器100的一个实施方案的局部剖视图和分解图。所示的机器100被实现为电动机,并且至少包括外壳102、内壳104、定子106、多个定子绕组108、音圈绕组112、倾斜磁体114、转子116和多个转子磁体118。
外壳102具有内表面122、外表面124和形成于该外壳中的内腔126。使用多种类型的未示出但已知的安装五金件中的任一种安装五金件来固定地安装外壳102以防止旋转。外壳102为至少半球状形状,并且可形成为单件或由多个件形成。如图2所示,所示的外壳102由多个(例如,2个)件形成,即外壳上部部分102-1和外壳下部部分102-2。此外,外壳102可由多种类型的磁性渗透材料中的任一种磁性渗透材料形成,包括但不限于铁、低碳钢和各种合金(诸如
内壳104设置在外壳102的内腔126内,并且具有内表面128、外表面132和形成于该内壳中的内腔134。内壳104被安装成相对于外壳102围绕仅一个轴线110-1或围绕第一旋转轴线110-1和第二旋转轴线110-2旋转。与外壳102类似,外壳104为至少半球状形状,并且可形成为单件或由多个件形成。如图2所示,所示的内壳104由多个(例如,2个)件形成,即内壳上部部分104-1和内壳下部部分104-2。此外,内壳104可由多种类型的磁性渗透材料中的任一种磁性渗透材料形成,包括但不限于铁、低碳钢和各种合金(诸如
内壳104并且更具体地是内壳上部部分104-1包括轴承表面136,该轴承表面具有设置在其中的未示出的轴承并且轴138延伸穿过该轴承。此外,内壳104并且更具体地是内壳下部部分104-2可包括一对铰链突出部142,即第一铰链突出部142-1和第二铰链突出部142-2,在包括铰链突出部时,该对铰链突出部用于将内壳104旋转地安装到外壳102以允许内壳104围绕第一旋转轴线110-1旋转。在一些实施方案中,内壳104并且更具体地是内壳下部部分104-2可不具有铰链突出部142,而是相反地可包括球形接头轴承结构133。球形接头轴承结构133接纳设置在轴137的端部上的球形接头135,该轴固定地耦接到外壳102或一些其他结构并从该外壳径向向内延伸。球形接头135和球形接头轴承结构133允许内壳104相对于外壳102围绕第一旋转轴线110-1和第二旋转轴线110-2两者旋转。
定子106固定地安装在内壳104内。即,位于内壳104的内腔134内。更具体地讲,至少在所示的实施方案中,定子106固定地安装在内壳下部部分104-2内。定子106包括限定多个定子槽146的多个径向向外延伸的定子极144。在所示的实施方案中,定子106包括十二个定子极144,并且因此包括十二个定子槽146。然而,应当理解,定子106可被实现为具有多于或少于该数量的定子极144和定子槽146。
无论定子极144和定子槽146的数量为何,定子绕组108缠绕定子极144并延伸穿过定子槽146。定子绕组108可以集中方式或分布方式缠绕在这些槽146内。在所示的实施方案中,需注意,定子绕组108被实现为3相绕组。然而,在其他实施方案中,分布式定子绕组108可被实现为具有N个相位,其中N是大于或小于三的整数。无论相位数为何,定子绕组108在通电时可操作以产生磁场。
音圈绕组112固定地耦接到外壳104的内表面122。优选地,音圈绕组112经由合适的粘合剂诸如例如各种环氧树脂、
倾斜磁体114固定地耦接到内壳104的外表面132。优选地,倾斜磁体114经由合适的粘合剂诸如例如各种环氧树脂、
转子116旋转地安装在内壳104内并且包围定子106的至少一部分。转子116具有内表面148和外表面152,并且可操作以相对于定子106围绕第三旋转轴线110-3旋转,该第三旋转轴线垂直于第一旋转轴线110-1和第二旋转轴线110-2。转子116耦接到轴138。因此,当转子116围绕第三旋转轴线110-3旋转时,轴138也是如此。
转子磁体118耦接到转子116的内表面148。优选地,转子磁体118经由合适的粘合剂诸如例如各种环氧树脂、
定子绕组108在通电时致使转子116(以及因此轴138)相对于定子106、外壳102和内壳104围绕第三旋转轴线110-3旋转。应当理解,未示出的负载诸如螺旋桨或其他装置可耦接到轴138以接纳从其提供的扭矩。取决于音圈绕组112的通电方式(以及内壳104的安装方式),音圈绕组使得内壳104以及因此转子116和轴138相对于定子106和外壳102围绕第一旋转轴线110-1和第二旋转轴线110-2中的一者或两者旋转。也就是说,当用交流电(AC)电压来给定子绕组108通电时,定子绕组108与转子磁体118之间产生洛伦兹力,这继而向转子116(以及因此轴138)施加扭矩,该扭矩致使转子相对于定子106围绕第三旋转轴线110-3(例如,自旋轴线)旋转。当用AC电压来给音圈绕组112通电时,音圈绕组112与倾斜磁体114之间产生洛伦兹力,这向内壳104(以及因此转子116和轴138)施加扭矩,该扭矩致使内壳相对于定子106和外壳102围绕第一旋转轴线110-1和第二旋转轴线110-2(例如,倾斜轴线和偏航轴线)中的一者或两者旋转。
在上述实施方案中,电动机被配置为使得倾斜线圈112保持静止并且倾斜磁体114旋转。在其他实施方案中,电动机可被配置为使得倾斜线圈旋转并且倾斜磁体保持静止。此类实施方案示于图3至图6中并且现在将参考这些图进行描述。
图3中所示的多自由度电磁机器300也被配置为电动机,并且其也至少包括外壳302、内壳304、定子306、多个定子绕组308、音圈绕组312、倾斜磁体314、转子316和多个转子磁体318。
外壳302具有内表面322、外表面324和形成于该外壳中的内腔326。使用多种类型的未示出但已知的安装五金件中的任一种安装五金件来固定地安装外壳302以防止旋转。在该实施方案中,外壳302为圆柱形形状并且形成为单件。应当理解,在其他实施方案中,外壳302可由多个件形成。外壳302可由多种类型的磁性渗透材料中的任一种磁性渗透材料形成,包括但不限于铁、低碳钢和各种合金(诸如
内壳304设置在外壳302的内腔326内,并且具有内表面328、外表面332和形成于该内壳中的内腔334。内壳304被安装成相对于外壳302仅围绕第一旋转轴线310-1(图3)或围绕两个垂直旋转轴线(第一旋转轴线310-1和第二旋转轴线310-2)(图5)旋转。内壳304为至少半球状形状,并且可形成为单件或由多个件形成。如图4所示,所示的内壳304由多个(例如,2个)件形成,即内壳上部部分304-1和内壳下部部分304-2。此外,内壳304可由多种类型的磁性渗透材料中的任一种磁性渗透材料形成,包括但不限于铁、低碳钢和各种合金(诸如
内壳304并且更具体地是内壳上部部分304-1包括轴承表面336,该轴承表面具有安装在其中的轴承331并且轴338延伸穿过该轴承。在图3所示的实施方案中,内壳304并且更具体地是内壳下部部分304-2包括一对铰链突出部342,即第一铰链突出部342-1和第二铰链突出部342-2,该对铰链突出部用于将内壳304旋转地安装到外壳302以允许内壳304围绕第一旋转轴线310-1旋转。在图5所示的实施方案中,内壳304并且更具体地是内壳下部部分304-2不包括铰链突出部342。相反,内壳304并且更具体地是内壳下部部分304-2包括球形接头轴承结构333。球形接头轴承结构333接纳设置在轴337的端部上的球形接头335,该轴固定地耦接到安装结构339并从该安装结构径向向内延伸。球形接头335和球形接头轴承结构333允许内壳304相对于外壳302围绕第一旋转轴线310-1和第二旋转轴线310-2两者旋转。
定子306固定地安装在内壳304内。即,位于内壳304的内腔334内。更具体地讲,至少在所示的实施方案中,定子306固定地安装在内壳下部部分304-2内。定子306包括限定多个定子槽346的多个径向向外延伸的定子极344。在所示的实施方案中,定子306包括十二个定子极344,并且因此包括十二个定子槽346。然而,应当理解,定子306可被实现为具有多于或少于该数量的定子极344和定子槽346。
无论定子极344和定子槽346的数量为何,定子绕组308缠绕定子极344并延伸穿过定子槽346。定子绕组308可以集中方式或分布方式缠绕在这些槽346内。在所示的实施方案中,需注意,定子绕组308被实现为3相绕组。然而,在其他实施方案中,分布式定子绕组308可被实现为具有N个相位,其中N是大于或小于三的整数。无论相位数为何,定子绕组308在通电时可操作以产生磁场。
音圈绕组312缠绕在内壳304的外表面332上。优选地,音圈绕组312缠绕在内壳304的外表面332上,并且其可另外经由合适的粘合剂诸如例如各种环氧树脂、
倾斜磁体314固定地耦接到外壳302的内表面322。优选地,倾斜磁体314经由合适的粘合剂诸如例如各种环氧树脂、
转子316旋转地安装在内壳304内并且包围定子306的至少一部分。转子316具有内表面348和外表面352,并且可操作以相对于定子306围绕第三旋转轴线310-3旋转,该第三旋转轴线垂直于第一旋转轴线310-1和第二旋转轴线310-2。转子316耦接到轴338。因此,当转子316围绕第三旋转轴线310-3旋转时,轴338也是如此。
转子磁体318耦接到转子316的内表面348。优选地,转子磁体318经由合适的粘合剂诸如例如各种环氧树脂、
定子绕组308在通电时致使转子316(以及因此轴338)相对于定子306、外壳302和内壳304围绕第三旋转轴线310-3旋转。应当理解,未示出的负载诸如螺旋桨或其他装置可耦接到轴338以接纳从其提供的扭矩。取决于音圈绕组312的通电方式(以及内壳304的安装方式),音圈绕组使得内壳304(以及因此转子316和轴338)相对于定子306和外壳302围绕第一旋转轴线310-1和第二旋转轴线310-2中的一者或两者旋转。也就是说,当用交流电(AC)电压来给定子绕组308通电时,定子绕组308与转子磁体318之间产生洛伦兹力,这继而向转子316(以及因此轴338)施加扭矩,该扭矩致使转子相对于定子306围绕第三旋转轴线310-3(例如,自旋轴线)旋转。当用AC电压来给音圈绕组312通电时,音圈绕组312与倾斜磁体314之间产生洛伦兹力,这向内壳304施加扭矩,该扭矩致使内壳(以及因此转子316和轴338)相对于定子306和外壳302围绕第一旋转轴线310-1和第二旋转轴线310-2(例如,倾斜轴线和偏航轴线)中的一者或两者旋转。
在上述实施方案中,电动机被配置有包围(或至少部分地包围)定子的转子。此类构型可被称为“外转式”构型。在可被称为“内转式”构型的另一个实施方案中,定子包围(或至少部分地包围)转子。此类实施方案示于图7至图11中并且现在将参考这些图进行描述。
图7中示出的多自由度电磁机器700也被配置为电动机,并且至少包括外壳702、内壳704、转子706、多个转子磁体708、定子712、多个定子绕组714、音圈绕组716和倾斜磁体718。
外壳702具有内表面722、外表面724和形成于该外壳中的内腔726。使用多种类型的未示出但已知的安装五金件中的任一种安装五金件来固定地安装外壳702以防止旋转。在该实施方案中,外壳702为圆柱形形状并且形成为单件。应当理解,在其他实施方案中,外壳702可由多个件形成。外壳702可由多种类型材料中的任一种材料形成,包括但不限于磁性渗透材料,包括但不限于铁、低碳钢和各种合金(诸如
内壳704设置在外壳702的内腔726内,并且具有内表面728、外表面732和形成于该内壳中的内腔734。内壳704被安装成相对于外壳702仅围绕第一旋转轴线710-1(图7)或围绕两个垂直旋转轴线(第一旋转轴线710-1和第二旋转轴线710-2)(图9)旋转。内壳704为至少半球状形状,并且可形成为单件或由多个件形成。如图8所示,所示的内壳704由多个(例如,2个)件形成,即内壳上部部分704-1和内壳下部部分704-2。此外,内壳704可由多种类型的磁性渗透材料中的任一种磁性渗透材料形成,包括但不限于铁、低碳钢和各种合金(诸如
内壳上部部分704-1包括第一轴承表面736-1,该第一轴承表面具有设置在其中的第一轴承731-1并且轴738延伸穿过该第一轴承,并且内壳下部部分704-2包括第二轴承表面736-2,该第二轴承表面具有设置在其中的第二轴承731-2并且转子704的一部分延伸穿过该第二轴承。在图9所示的实施方案中,内壳704具有一对铰链突出部742,即第一铰链突出部742-1和第二铰链突出部742-2,该对铰链突出部耦接到内壳上并且用于将内壳704旋转地安装到外壳702以允许内壳704围绕第一旋转轴线710-1旋转。在图9所示的实施方案中,内壳704并且更具体地是内壳下部部分704-2可不包括铰链突出部742,而是相反地包括球形接头轴承结构733。球形接头轴承结构733接纳设置在轴737的端部上的球形接头735,该轴固定地耦接到安装结构739并从该安装结构径向向内延伸。球形接头735和球形接头轴承结构733允许内壳704相对于外壳702围绕第一旋转轴线710-1和第二旋转轴线710-2两者旋转。
转子706旋转地安装在内壳704内并且具有内表面748和外表面752。转子706可操作以相对于内壳704围绕第三旋转轴线710-3旋转,该第三旋转轴线垂直于第一旋转轴线710-1和第二旋转轴线710-2。转子706耦接到轴738。因此,当转子706围绕第三旋转轴线710-3旋转时,轴738也是如此。如图8所示,所示的转子706由多个(例如,2个)件形成,即转子上部部分706-1和转子下部部分706-2。
转子磁体708耦接到转子706的外表面752。优选地,转子磁体708经由合适的粘合剂诸如例如各种环氧树脂、
定子712(其实施方案在图10中最清楚地示出)固定地安装到内壳704的内表面728并且包围转子706的至少一部分。定子712具有限定多个定子槽746的多个径向向内延伸的定子极744。在所示的实施方案中,定子712包括18个定子极744,并且因此包括18个定子槽746。然而,应当理解,定子712可被实现为具有多于或少于该数量的定子极744和定子槽746。
无论定子极744和定子槽746的数量为何,定子绕组714缠绕定子极744并延伸穿过定子槽746。定子绕组714可以集中方式或分布方式缠绕在这些槽746内。在所示的实施方案中,需注意,定子绕组714被实现为3相绕组。然而,在其他实施方案中,分布式定子绕组714可被实现为具有N个相位,其中N是大于或小于三的整数。无论相位数为何,定子绕组714在通电时可操作以产生磁场。
音圈绕组716缠绕在内壳704的外表面732上。优选地,音圈绕组716缠绕在内壳704的外表面732上,并且其可另外经由合适的粘合剂诸如例如各种环氧树脂、
图11中的倾斜磁体718固定地耦接到外壳702的内表面722。优选地,倾斜磁体718经由合适的粘合剂诸如例如各种环氧树脂、
定子绕组714在通电时致使转子706(以及因此轴738)相对于定子712、外壳702和内壳704围绕第三旋转轴线710-3旋转。应当理解,未示出的负载诸如螺旋桨或其他装置可耦接到轴738以接纳从其提供的扭矩。取决于音圈绕组716的通电方式(以及内壳704的安装方式),音圈绕组使得内壳704(以及因此转子706和轴738)相对于定子712和外壳704围绕第一旋转轴线310-1和第二旋转轴线310-2中的一者或两者旋转。也就是说,当用交流电(AC)电压来给定子绕组714通电时,定子绕组714与转子磁体708之间产生洛伦兹力,这继而向转子706(以及因此轴738)施加扭矩,该扭矩致使转子相对于定子712围绕第三旋转轴线310-3(例如,自旋轴线)旋转。当用AC电压来给音圈绕组716通电时,音圈绕组716与倾斜磁体718之间产生洛伦兹力,这向内壳704施加扭矩,该扭矩致使内壳(以及因此转子706和轴738)相对于定子712和外壳702围绕第一旋转轴线710-1和第二旋转轴线710-2(例如,倾斜轴线和偏航轴线)中的一者或两者旋转。
现在参见图12,示出了包括本文所述的机器100、300、700中的任一者的多自由度控制系统1200的功能框图。如图12所示,系统1200包括耦接到定子绕组108、308、714中的每一者并耦接到音圈绕组112、312、716的控件1202。控件1202被配置为控制定子绕组108、308、714和音圈绕组112、312、716中的电流量值和方向,由此控制转子116、316、706和内壳104、304、704的旋转速度和方向。控件1202可被配置为使用开环控制或闭环控制来实现该功能。开环控制提供相对较低的成本、较低的复杂度、相对简单的DC操作以及相对较低的尺寸和重量。闭环控制提供较高的准确性和精度、较高的带宽、以及自主控制。可在控件902中实现各种控制技术。合适控制技术的一些非限制性示例包括PWM控制和反EMF控制。
本文所公开的多自由度电磁机器表现出优于许多目前已知的球状电动机的若干优点。这些优点中的一些优点包括但不限于相对较高的自旋扭矩、改善的推力重量比、增加的热效率和改善的性能、更好的可控性、通过平滑过渡阶跃减少的镶齿效应,以及因为转子的重心(CG)位于机器的中心而得到的改善的稳定性。
在本文件中,关系术语诸如第一和第二等,可以仅用于将一个实体或动作与另一个实体或动作区分开,而不一定要求或暗示此类实体或动作之间的任何实际的此类关系或顺序。除非明确地由权利要求书语言限定,否则数字序数诸如“第一”、“第二”、“第三”等仅表示多个中的不同个体,并且不暗示任何顺序或序列。除非明确地由权利要求书的语言限定,否则任何权利要求书中的文本的序列不暗示必须根据此类序列以时间或逻辑顺序执行处理步骤。在不脱离本发明的范围的情况下,方法步骤可以任何顺序互换,只要此类互换不与权利要求语言矛盾并且不是逻辑上荒谬的。
此外,取决于上下文,在描述不同元件之间的关系时使用的诸如“连接”或“耦接到”的词语不暗示必须在这些元件之间进行直接物理连接。例如,两个元件可以通过一个或多个附加元件物理地、磁性地、电子地、逻辑地或以任何其他方式彼此连接。
虽然在本发明的前述具体实施方式中已呈现了至少一个示例性实施方案,但是应当理解存在大量的变型形式。还应当理解,一个示例性实施方案或多个示例性实施方案仅是示例,并且不旨在以任何方式限制本发明的范围、适用性或构造。相反,前述具体实施方式将为本领域的技术人员提供一种用于实现本发明的示例性实施方案的便利路线图。应当理解,在不脱离如所附权利要求书中阐述的本发明的范围的情况下,可对示例性实施方案中描述的元件的功能和布置进行各种改变。
- 多自由度电磁机器的旋转和倾斜控制
- 多自由度电磁机器