适用自然水体的深海采矿系统自航拖曳模拟器及模拟方法
文献发布时间:2023-06-19 12:02:28
技术领域
本发明属于深海采矿系统实验装置技术领域,具体涉及一种适用自然水体的深海采矿系统自航拖曳模拟器及模拟方法。
背景技术
深海采矿是在复杂海洋环境因素影响下将深海多金属结核连续、高效地采集并输送到海面采矿船上的工作。因开采环境多为4000~6000米水深的大洋底矿床,所以深海采矿系统拥有复杂长管线的扬矿子系统,加之作业过程包含布放、拖曳航行、避障航行、转向航行、连续复杂开采路径规划航行、回收等流程,目前深海采矿系统小缩尺比模型的测试与实验常选择在具有造浪、造风功能的大型动态测试水池中进行,如若需要增加造流功能,则只能在大型循环水槽中进行更小缩尺比模型的测试与实验。因此,由于缩尺比较小带来的失准,以及实验场所尺寸限制无法满足多方向的航行条件一直以来较为困扰。所以,能进行更符合实际作业条件的大缩尺比试验模型高雷诺数流体动力的试验装置成为了迫切的需求,因此,本发明提供适用自然水体的深海采矿系统自航拖曳模拟器及模拟方法,该模拟器可在开阔的自然水体中进行实验,通过远程无线控制,其自身具有自航能力,可以实现模拟采矿船在各级海况情况下的6个自由度的运动情况,以及实时采集深海采矿扬矿子系统的动态特性和空间构型等参数。进而可开展更全面且准确的深海采矿系统测试与实验。
发明内容
为了更全面并准确的模拟深海采矿系统的测试与实验,本发明提供一种适用自然水体的深海采矿系统自航拖曳模拟器及模拟方法,该模拟器可在开阔的自然水体中进行实验,通过远程无线控制,其自身具有自航能力,可以实现模拟采矿船在各级海况情况下的6个自由度的运动情况,设计合理,克服了现有技术的不足,具有良好的效果。
适用自然水体的深海采矿系统自航拖曳模拟器,所述模拟器包括浮体单元、工作台面、推进系统、波高测定系统、水声定位系统、流速测定系统、无线电通讯系统、GPS定位系统、陀螺姿态控制系统、六自由度台架、中央控制柜、实验扬矿硬管模型和快拆式电池箱,所述浮体单元通过横梁结构与工作台面固定连接,所述中央控制柜和快拆式电池箱分设于工作台面上台面的前后端,所述推进系统设置在所述模拟器尾部,所述波高测定系统、水声定位系统和流速测定系统均布置在工作台面的下台面上,工作台面中部设有重心投影孔,工作台面上设有固定于重心投影孔两侧部的工作塔架,工作塔架上部悬吊固定有六自由度台架,六自由度台架下部悬吊固定有陀螺姿态控制系统,所述重心投影孔的圆心、陀螺姿态控制系统的重心和六自由度台架的重心均与所述模拟器整体重心的竖直投影相重合,陀螺姿态控制系统与六自由度台架的协同联动能够模拟出采矿船横荡、纵荡、艏摇、横摇、纵摇、垂荡共六个自由度的运动状态,工作塔架顶部两侧固定有无线电通讯系统与GPS定位系统,无线电通讯系统顶端布置有超大广角视觉系统,实验扬矿硬管模型与重心投影孔相连接或穿过重心投影孔与陀螺姿态控制系统底部相连接。
进一步地,所述浮体单元由第一浮体材料和第二浮体材料组成,所述第一浮体材料和第二浮体材料分所述模拟器左右两侧布置,所述第一浮体材料和第二浮体材料均为中空腔体结构内部填充物为砂砾或石子,第一浮体材料底部设置有第一填充阀门,第二浮体材料底部设置有第二填充阀门。
进一步地,所述横梁结构包括第一横梁、第二横梁和第三横梁,第一浮体材料和第二浮体材料依靠第一横梁、第二横梁和第三横梁固定连接,三根横梁顶部均与工作台面固定连接。
进一步地,所述推进系统包括主推进系统、第一侧推进系统和第二侧推进系统,主推进系统布置在工作台面后端,第一侧推进系统布置在第二浮体材料后端,第二侧推系统布置在第一浮体材料后端,所述主推进系统、第一侧推进系统和第二侧推系统均可独立控制推进角度和螺旋桨转速。
进一步地,所述快拆式电池箱底部设有多个通用卡扣,能够与工作台面的上台面多个位置固定扣接。
进一步地,所述六自由度台架由上台面、万向节、伸缩缸和下台面组成,所述上台面通过螺栓与工作塔架固定连接,所述伸缩缸为六个,伸缩缸两端通过万向节分别与上、下台面相连接。
进一步地,所述陀螺姿态控制系统由dy转台、陀螺壳体、检修盖、dx转轴和扩展连接口组成,dy转台通过螺栓与下台面固定连接,陀螺壳体上设置有检修盖、内腔装有可高速旋转的大质量陀螺体,dy转台相对于六自由度运动姿态控制系统主体转动,陀螺壳体可沿dx转轴转动,所述扩展连接口设置在陀螺姿态控制系统下端部。
进一步地,实验扬矿硬管模型通过带锁万向节与工作台面的重心投影孔相连接或穿过重心投影孔、通过带锁万向节与扩展连接口直接连接。
一种适用自然水体的深海采矿系统自航拖曳模拟器的模拟方法,所述模拟方法包括以下步骤:
步骤1:根据待测实验模型的缩尺比、质量和自身浮力参数确定所述模拟器所需浮力,进而确定浮体单元腔内所需填充物的质量;
步骤2:将快拆式电池箱安装至工作台面后端居中位置;
步骤3:通过码头或母船将所述模拟器下放至水面,接通位于中央控制柜面板上的总电源开关,进行全方面自检,空车试机并采集数据作为实验对照样本数据与零点标点参考,确认模拟器状态一切正常;
步骤4:将待测实验模型通过码头或母船下放至水面,将待测实验模型的实验扬矿硬管模型部位通过带锁万向节连接至工作台面下部的重心投影孔部位;
步骤5:检测所述模拟器姿态,若发生偏斜,可通过调整快拆式电池箱在工作台面的上台面的前后左右位置,进行整体模拟器姿态配平;
步骤6:根据实验的工况要求,通过控制台远程进行程序设定,可任意独立搭配所述模拟器各工况模拟功能的使用;
步骤7:所述模拟器将获取的各数据通过中央控制柜初步处理后将通过无线电通讯系统与远程控制台交互数据;
步骤8:实验人员实时核验模拟器各传感器所采集的数据是否有效且正常,用以控制实验进度,调整实验方案;
步骤9:实验结束后,通过码头或母船回收所述模拟器并清洁维护妥善安置待下次使用。
进一步地,所述步骤6中模拟器的工况模拟功能包括以下工况模拟功能:
姿态模拟,所述模拟器通过陀螺姿态控制系统与六自由度台架的协同联动来模拟出采矿船的横荡、纵荡、艏摇、横摇、纵摇和垂荡六个自由度的运动状态,对模拟器的姿态干预既可是正向的亦可是负向的,适用于自然水域不可控,利用本功能进行减摇减摆或增摇增摆来贴近实验要求工况;
拖曳航行,模拟器所搭载的主推进系统、第一侧推进系统和第二侧推系统均可独立控制推进角度和螺旋桨转速,通过改变螺旋桨转速,使得模拟器可模拟出匀速拖航、匀变速拖航、变加速拖航、以及各类复杂开采路径规划航行及各类半径转向航行工况;
转向拖航,模拟器所搭载的主推进系统、第一侧推进系统、第二侧推系统均可独立控制推进角度和螺旋桨转速,通过改变推进角度和螺旋桨转速,实现各种形式的曲线运动,模拟出采矿船各类路径规划的拖航工况;
激励震动,模拟器所搭载的陀螺姿态控制系统与六自由度台架可以对模拟器施加高频的震动,通过模拟器主体结构传递至实验扬矿硬管模型或通过带锁万向节通过陀螺姿态控制系统的下部的扩展连接口直接连接,更为直接的产生激励震动,用来观测扬矿管线系统的动态响应特性;
铰接固接切换,所述带锁万向节存在两个正交的水平轴,可提供两个自由度的自由转动,带锁万向节将扬矿硬管顶端以铰接的形式与模拟器连接,可独立限制两个水平轴中的任意一个轴的转动后与模拟器连接或两个水平轴的转动都限制后最终将连接形式变为固接的方式与模拟器连接。
有益效果:所述模拟器可在开阔的自然水体中进行模拟实验,弥补了深海采矿系统因拥有复杂长管线的扬矿子系统而无法在一定尺寸的实验室水体中进行复杂的拖曳航行、避障航行、大半径转向航行、连续复杂开采路径规划航行等试验项目的技术空白,通过远程无线控制,其自身具有自航能力,不必等候海况时宜,可通过模拟器自身功能实现模拟采矿船在各级海况情况下的6个自由度的运动情况,以及实时采集深海采矿扬矿子系统的动态特性和空间构型等参数,提供了包括浮体材料填充、快拆式电池箱移位等多种方式实现快速配平,无需额外添加配重块之繁琐,节约大量时间。即具体通过主体结构设计提高稳定性的前提下,通过陀螺姿态控制系统与六自由度台架的协同联动来模拟出采矿船横荡、纵荡、艏摇、横摇、纵摇、垂荡共六个自由度的运动状态,对模拟器的姿态干预既可是正向的亦可是负向的,以适用于自然水域不可控,利用本功能进行减摇减摆或增摇增摆来贴近实验要求工况;通过三个独立的推进系统,可模拟出匀速拖航、运变速拖航、变加速拖航以及各类复杂开采路径规划航行及各类半径转向航行等工况;本发明设计合理,克服了现有技术的不足,可节省高额的租船海试成本,无需等候试验船排期与季节气候海况时宜等更为便捷自由地开展更全面且准确的深海采矿系统测试与实验,具有良好的效果,大大提高实验效率。
附图说明
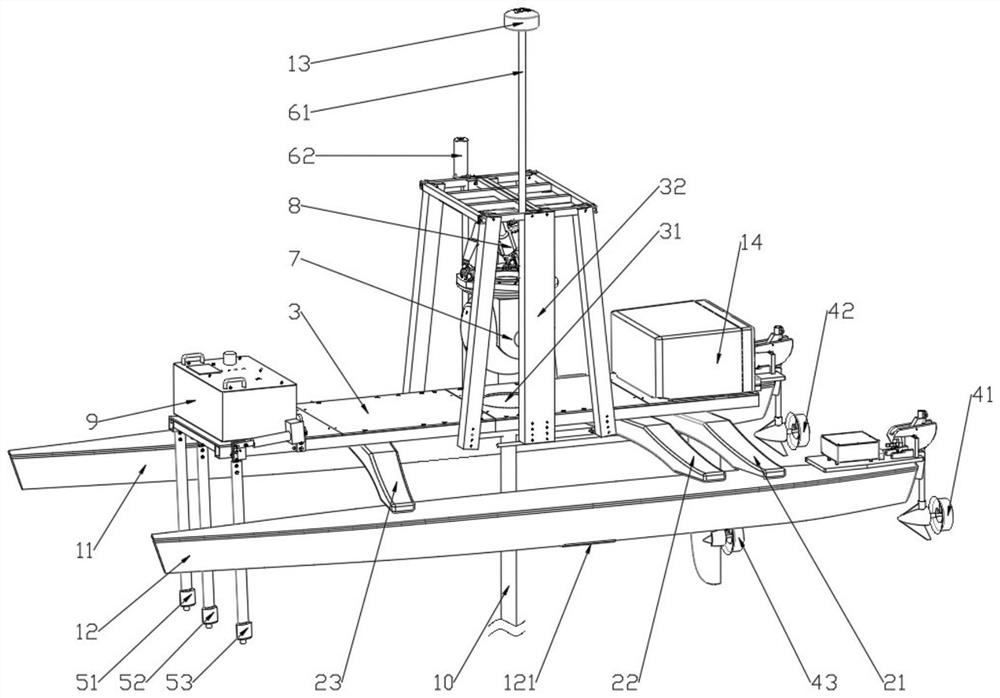
图1、本发明所述模拟器结构轴测示意图;
图2、本发明所述模拟器的结构仰视示意图;
图3、本发明陀螺姿态控制系统与六自由度台架的结构轴测示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明,即所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
本发明的实验模拟器由第一浮体材料11与第二浮体材料12分左右两侧布置,中间依靠第一横梁21、第二横梁22、第三横梁23共三根横梁固定连接,三根横梁顶部均与工作台面3固定连接。
分左右布置两浮体材料旨在可提高模拟器的整体稳定性,进而提高模拟器的整体姿态可控性,克服自然水体不可控扰动,且可以留出中部大量空间用于布置安装扬矿硬管等试验设备,为后期回收与布放扬矿硬管留出作业空间。
工作台面
此设计均为了进一步提高模拟器整体姿态的控制能力。在模拟器各系统中,陀螺姿态控制系统7的质量最为大且集中,其固定方式采取悬吊式目的也是为了使其位置更加靠近模拟器的整体重心。第一,陀螺姿态控制系统7其内部装有可高速旋转的大质量陀螺体,可利用角动量守恒与陀螺的定轴性对模拟器的整体姿态进行干预。第二,加上六自由度台架8的辅助,使得陀螺姿态控制系统7可在空间中一定范围内六自由度任意运动,其原理即通过改变具有较大质量和定轴性的陀螺姿态控制系统7的空间位置,对模拟器的整体姿态进行干预,最终通过陀螺姿态控制系统7和六自由度台架8来弥补实验进行中自然水域实时海况的不可控性,使其达到实验相关要求。
主推进系统43布置在工作台面后3端,第一侧推进系统41布置在第二浮体材料12后端,第二侧推系统42布置在第一浮体材料11后端,
此设计是为了提高模拟器整体的航行灵活性,为满足实验条件中复杂的拖航形式、加速形式、转向形式。主推进系统43、第一侧推进系统41、第二侧推系统42均可独立控制推进角度和螺旋桨转速,可产生向各个方向产生推进力。进而实现模拟器原地转向等各种运动形式。
第一浮体材料11为中空腔体结构,其底部设置有第一填充阀门111,第二浮体材料12同为中空腔体结构,其底部设置有第二填充阀门121。
此设计是为了改变模拟器整体的浮力和质量,可通过填充阀门建立通道,将砂砾或石子等材料填充至浮体材料的中空腔体结构中,进而改变模拟器整体的吃水深度、惯性、重心等特性,以兼容各种缩尺比的实验模型搭载模拟器。
工作塔架32顶部两侧固定有无线电通讯系统61与GPS定位系统62,无线电通讯系统61顶端布置有超大广角视觉系统13。
模拟器采用无人作业模式,通过无线通讯在母船或码头通过控制台进行遥控作业,模拟器自身位置信息需要通过GPS实时获取,且位置信息、实验传感器实时数据流、航行视觉图像信息均通过无线电与控制台交互。无线电通讯系统61位于模拟器最高处,因此布置有超大广角视觉系统13,以便于对模拟器四周航行环境与模拟器自身各设备运转情况进行图像视觉观察。
工作台面3前端布置有中央控制柜9、波高测定系统51、水声定位系统52、流速测定系统53,工作台面3后端布置有快拆式电池箱14,快拆式电池箱14底部有多个通用卡扣,可以与工作台面3的上台面多个位置固定扣接。
波高测定系统51用于搭载核心部件为波高仪,实时监测水面波高情况;流速测定系统53核心部件为搭载流速计用于测量实时水流速度;水声定位系统52所搭载依靠水声定位系统技术,用于实现实时获取水下扬矿硬管、泵组、中央矿仓、扬矿软管、集矿机等各个水下实验部件的位置信息,进而计算出水下所有部件的空间构型情况。波高测定系统51、水声定位系统52、流速测定系统53均布置工作台面3前端,目的是为了处于来流方向的最前端,以免后面受到实验扬矿硬管模型10、第一侧推进系统41、第二侧推系统42、主推进系统43、第一浮体材料11、第二浮体材料12等结构对水流的影响,保证传感器采集的数据准确。
快拆式电池箱14底部有多个通用卡扣,可以与工作台面3的上台面多个位置固定扣接。利用快拆式电池箱14自身质量调配整个实验模拟器的重心位置以快速配平,且方便即时为模拟器更换电池补充电能。
陀螺姿态控制系统7,通过螺栓将dy转台71与下台面84相连接固定,陀螺壳体72上设置有检修盖73,内腔有陀螺体。dy转台71也相对于六自由度运动陀螺姿态控制系统7主体转动,陀螺壳体72可沿dx转轴74转动。
六自由度台架8通过螺栓将上台面81与工作塔架32相连接固定,六自由度台架8包含六个相同的伸缩缸83,伸缩缸83两端分别通过一个万向节82与上台面81和下台面84相连接。
在上台面81通过工作塔架32与模拟器主体结构固定的前提下,此时按照一定逻辑同时改变六个伸缩缸83的行程,可实现通过下台面84带动陀螺姿态控制系统7在一定空间内的任意六自由度运动,进而实现对模拟器的整体姿态进行干预。由于真实实验海况采矿船对艏摇与横摇比较敏感,所以陀螺姿态控制系统7中的dy转台71和dx转轴74可提供两个自由度的连续大角度旋转,进一步加大了对模拟器的整体姿态进行干预能力。
实验扬矿硬管模型10通过带锁万向节15与工作台面3的重心投影孔31相连接,亦可穿过重心投影孔31,通过带锁万向节15通过陀螺姿态控制系统7的下部的扩展连接口75直接连接。
带锁万向节15可将扬矿硬管顶端以铰接的形式与模拟器连接,其也可独立限制两个轴中的任意一个轴,亦或都限制将连接形式变为固接。常规实验时,实验扬矿硬管模型10通过带锁万向节15与工作台面3的重心投影孔31相连接,此时自然水流实时作用于模拟器,模拟器通过陀螺姿态控制系统7、六自由度台架8的协同联动对整体姿态进行控制以达到实验条件要求,然后通过工作台面3将影响传递给实验对象;若进行极端条件实验时,实验扬矿硬管模型10亦可穿过重心投影孔31,通过带锁万向节15通过陀螺姿态控制系统7的下部的扩展连接口75直接连接。此时通过陀螺姿态控制系统7、六自由度台架8的协同联动直接作用于扬矿硬管,弱化了波浪对模拟器影响,在实验情境中即弱化了采矿船受不同海况带来的影响。
适用自然水体的深海采矿系统自航拖曳模拟器具体实验模拟方法为:
步骤一:根据待测实验模型的缩尺比、质量、自身浮力等参数来确定模拟器所需浮力,进而确定第一浮体材料11与第二浮体材料12腔内所需填充物的质量。通过第一填充阀门111与第二填充阀门121调整腔内填充物,但要保证两侧等量,填充物可以是砂砾或石子等固体散料;
步骤二:将快拆式电池箱14安装至工作台面3后端居中位置;
步骤三:通过码头或者是母船将模拟器下放至水面,接通位于中央控制柜9面板上的总电源开关,进行全方面自检,空车试机并采集数据作为实验对照样本数据与零点标点参考,确认模拟器状态一切正常;
步骤四:将待测实验模型通过码头或者是母船下放至水面,将待测实验模型的10实验扬矿硬管模型部位通过带锁万向节15连接至工作台面3下部的重心投影孔31部位;
步骤五:检测模拟器姿态,若发生偏斜,可通过快拆式电池箱14底部的多个通用卡扣改变其在工作台面3的上台面的前后左右位置,进行整体模拟器姿态配平;实验过程中控制台若收到模拟器电量低提示,则更换备用的快拆式电池箱14即可;
步骤六:根据实验的工况要求,通过控制台远程进行程序设定,可任意独立搭配模拟器各工况模拟功能的使用:
工况模拟功能1:姿态模拟。模拟器所搭载的陀螺姿态控制系统7与六自由度台架8主要用于对模拟器整体姿态进行控制,使得模拟器能够模拟出实验工况所要求的采矿船受波流联合作用而产生的六自由度运动,即具体通过陀螺姿态控制系统7与六自由度台架8的协同联动来模拟出采矿船横荡、纵荡、艏摇、横摇、纵摇、垂荡共六个自由度的运动状态,对模拟器的姿态干预既可是正向的亦可是负向的,以适用于自然水域不可控,利用本功能进行减摇减摆或增摇增摆来贴近实验要求工况;
工况模拟功能2:拖曳航行。模拟器所搭载的主推进系统43、第一侧推进系统41、第二侧推系统42均可独立控制推进角度和螺旋桨转速,通过改变螺旋桨转速,可以使得模拟器可模拟出匀速拖航,运变速拖航,变加速拖航,以及各类复杂开采路径规划航行及各类半径转向航行工况;
工况模拟功能3:转向拖航。模拟器所搭载的主推进系统43、第一侧推进系统41、第二侧推系统42均可独立控制推进角度和螺旋桨转速,通过改变推进角度和螺旋桨转速,实现各种形式的曲线运动,可以模拟出采矿船各类路径规划的拖航工况;
工况模拟功能4:激励震动。模拟器所搭载的陀螺姿态控制系统7与六自由度台架8可以对模拟器施加高频的震动,可以通过模拟器主体结构传递至实验扬矿硬管模型10,亦可通过带锁万向节15通过陀螺姿态控制系统7的下部的扩展连接口75直接连接,更为直接的产生激励震动。用来观测扬矿管线系统的动态响应特性;
工况模拟功能5、铰接固接切换。所述带锁万向节存在两个正交的水平轴,可提供两个自由度的自由转动,带锁万向节将扬矿硬管顶端以铰接的形式与模拟器连接,可独立限制两个水平轴中的任意一个轴的转动后与模拟器连接或两个水平轴的转动都限制后最终将连接形式变为固接的方式与模拟器连接;
步骤七:模拟器所搭载的GPS定位系统用以实时获取模拟器的自身位置信息;波高测定系统51用以实时监测水面波高情况;水声定位系统52用以实时获取水下实验模型中扬矿硬管、泵组、中央矿仓、扬矿软管、集矿机等各个水下实验部件的位置信息;流速测定系53统用以测量实时水流速度,超大广角视觉系统13会实时记录数据,以及随实验模型设置的拉压力传感器、应变传感器,震动传感器,惯性导航系统,加速度传感器等各类传感器,上述各数据流通过中央控制柜9初步处理后将通过无线电通讯系统61与远程控制台交互数据;
步骤八:实验人员实时核验模拟器各传感器所采集的数据是否有效且正常,用以控制实验进度,调整实验方案;
步骤九:实验结束后,通过码头或者是母船回收模拟器。清洁维护妥善安置待下次使用。
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
- 适用自然水体的深海采矿系统自航拖曳模拟器及模拟方法
- 适用自然水体的深海采矿系统自航拖曳模拟器及模拟方法