基于双水平传感器的平台调平控制系统和调控方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明属于设备控制技术领域,具体而言,涉及一种基于双水平传感器的平台调平控制系统和调控方法。
背景技术
随着工程技术的发展,很多仪器设备需要在水平平台上工作,平台的调平精度直接影响到被载设备的工作性能。目前平台调平主要是通过手动调平或者自动调平来实现。手动调平是通过人眼观察水平仪气泡位置,手动控制平台支腿伸缩从而实现平台调平,此方法缺点是平台调平精度受人为因素影响,调平效率低。自动调平是通过计算机读取水平传感器输出值控制平台支腿伸缩从而实现调平。由于大型平台自身存在形变问题,水平传感器无法完整体现平台调平状况,所以自动调平在大型平台的应用中常常需要人工补偿,降低了调平效率。
发明内容
本发明旨在提供一种基于双水平传感器的平台调平控制系统和调控方法,主要是针对大型平台易发生形变的问题,提高了调平精度和效率。
为了实现上述目的,根据本发明的一个方面,提供了一种基于双水平传感器的平台调平控制系统,包括平台本体以及可伸缩的左前支腿、右前支腿、左后支腿和右后支腿;所述平台本体靠近前端位置处设有第一水平传感器,靠近后端位置处设有第二水平传感器,所述第一水平传感器和第二水平传感器通过线缆与控制器连接并受其调控;所述左前支腿、右前支腿、左后支腿和右后支腿均通过线缆与控制器连接,且通过所述控制器调控各个支腿的伸缩。
根据本发明,所述第一水平传感器位于左前支腿和右后支腿连线的三分之一处;所述第二水平传感器位于左前支腿和右后支腿连线的三分之二处。
根据本发明,所述第一水平传感器和第二水平传感器均配置为能够感应平台本体前后方向和左右方向的水平倾斜角度,并通过数据线缆将角度数据传输至控制器。
根据本发明的另一方面,还提供了一种基于双水平传感器的平台调平控制方法,包括以下步骤:
S1、监测第一水平传感器感应平台本体前后方向水平倾斜角度值α
监测第二水平传感器感应平台本体前后方向水平倾斜角度值α
S2、将所述第一水平传感器感应值α
S3、取α
如果α>β且α
如果α>β且α
如果β>α且β
如果β>α且β
S4、当监测到α
本发明的有益效果:
本发明主要是针对大型平台自身存在形变问题,现有的水平传感器无法完整体现平台调平状况以及自动调平在大型平台的应用中常常需要人工补偿等问题,提供了一种基于双水平传感器的平台调平控制系统和控制方法,实现了对大型工作平台的自动快速精准调平,并可以有效对大型平台的形变进行自动感应补偿,自动调平后无需人员手动补偿,解决了现有技术中平台调平精度受人为因素影响,调平效率低的问题。
附图说明
图1为本发明实施例中基于双水平传感器的平台调平控制系统的结构示意图;
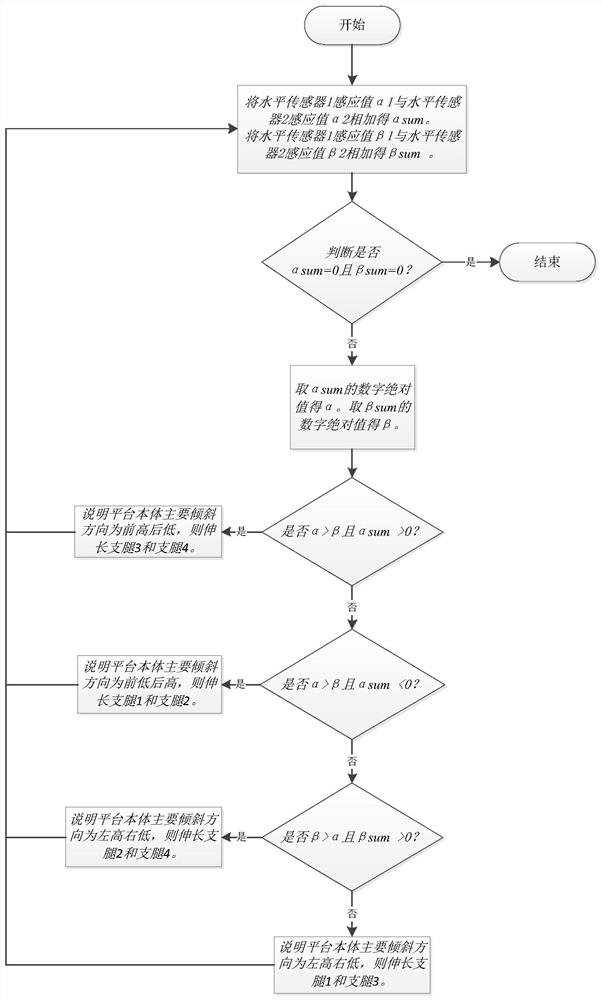
图2为本发明实施例中基于双水平传感器的平台调平工作流程示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,下面结合本附图及实施例,对本发明做进一步的详细说明。需要强调,此处描述的具体实施例仅用于更好的阐述本发明,为本发明部分实施例,而非全部实施例,所以并不用作限定本发明。此外,下面描述的本发明实施例中涉及的技术特征,只要彼此间未构成冲突,即可以相互组合。
如图1所示,本发明提供了一种基于双水平传感器的平台调平控制系统,包括平台本体10以及可伸缩的左前支腿11、右前支腿12、左后支腿13和右后支腿14。平台本体10靠近前端位置处设有第一水平传感器20,靠近后端位置处设有第二水平传感器30,第一水平传感器20和第二水平传感器30通过线缆50与控制器40连接并受其调控。第一水平传感器20可以感应平台本体10前后方向和左右方向的水平倾斜角度,第二水平传感器30也可以感应平台本体10前后方向和左右方向的水平倾斜角度。
其中,左前支腿11、右前支腿12、左后支腿13和右后支腿14均通过线缆50与控制器40连接,且通过控制器40调控各个支腿的伸缩。
优选地,如图1所示,所述第一水平传感器20位于左前支腿11和右后支腿14连线的三分之一处;第二水平传感器30位于左前支腿11和右后支腿14连线的三分之二处。
根据本发明,第一水平传感器20和第二水平传感器30均配置为能够感应所述平台本体10前后方向和左右方向的水平倾斜角度,并通过线缆50将角度数据传输至控制器40。
本发明还提供了一种基于双水平传感器的平台调平控制方法,具体如下:
第一水平传感器20感应平台本体10前后方向水平倾斜角度值为α
第一水平传感器20感应平台本体10左右方向水平倾斜角度值为β
第二水平传感器30感应平台本体10前后方向水平倾斜角度值为α
第二水平传感器30感应平台本体10左右方向水平倾斜角度值为β
平台调平工作过程如图2所示,控制过程如下:
步骤1:将第一水平传感器20感应值α
步骤2:将第一水平传感器20感应值β
步骤3:如果α
步骤4:取α
步骤5:取β
步骤6:如果α>β且α
步骤7:如果α>β且α
步骤8:如果β>α且β
步骤9:如果β>α且β
步骤10:返回步骤1。
通过该方法可以对具有IO接口、AD接口、DA接口、串口、CAN接口的液压控制器硬件功能模块进行快速测试。
以上所述仅是本发明的优选应用实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 基于双水平传感器的平台调平控制系统和调控方法
- 一种基于伺服电动缸和倾角传感器的自动调平控制系统