测量测试表面的高度图的方法
文献发布时间:2023-06-19 12:04:09
本申请是申请日为2015年7月24日、申请号为2015104410419、发明名称为“测量测试表面的高精度高度图的方法”的申请的分案申请。
技术领域
本发明涉及一种使用多传感器光学轮廓仪来测量测试表面的高精度高度图的方法。
背景技术
通常,对于3D光学轮廓仪系统,高度图精度与垂直扫描范围和垂直扫描速度成反比关系。高精度光学轮廓仪传感器可能具有有限的视野,例如视野可能是0.1×0.1mm,而测试表面可能更大一些。因此,存在如下需要,将位于传感器下方的测试表面从该测试表面的第一部分移动至该测试表面的后续部分,从而可以将多幅高度图结合在一起以使得能够得到整个测试表面的测量结果。如果针对各高度图,操作者不得不以自动方式或者手动方式寻找测试表面位于传感器的焦点深度和扫描范围(如果合适的话)之内的位置,这可能花费很长的时间来测量整个测试表面。
可能需要使用光学轮廓仪传感器来测量测试表面的高精度高度图的改进方法,其中,将测试表面定位在高精度光学轮廓仪传感器的焦点范围(focal range)之内的时间最短。
发明内容
本发明的目的是提供一种使用光学轮廓仪来测量测试表面的高精度高度图的改进方法。
因此,提供了一种使用多传感器光学轮廓仪来测量测试表面的高精度高度图的方法,包括:
通过设置于所述光学轮廓仪的具有相对长的工作距离和/或大的视野的预映射传感器来测量所述测试表面的粗糙高度图;
将所述粗糙高度图存储在存储器中;
将所述粗糙高度图细分为多个部分,以适合于设置于所述光学轮廓仪的相对高分辨率的光学轮廓仪传感器的视野;
计算所述高分辨率的光学轮廓仪传感器相对于所述测试表面的相应X、Y和Z位置;使用所计算出的X、Y和Z位置计算所述高分辨率的光学轮廓仪传感器相对于所述测试表面在X、Y和Z方向上的轨迹;
根据所述轨迹在X、Y和Z方向上使所述高分辨率的光学轮廓仪传感器相对于所述测试表面移动;以及
使用所述高分辨率的光学轮廓仪传感器来测量高精度高度图。
通过使用两个高度传感器可以实现高精度高度图的快速测量:快速且具有长焦点范围和长工作距离以对测试表面进行预映射的预映射传感器、以及针对高精度高度图具有高的高度测量精度的第二传感器(光学轮廓仪)。
通过预映射传感器的帮助,可以预先测量出测试表面和预映射传感器之间的距离。所测量的距离可以用来在高精度传感器有限的焦点范围内移动测试表面。高精度传感器因此可以直接用来测量而没有将时间浪费在在焦点范围内寻找测试表面上。
根据实施例,所述预映射传感器包括:共聚焦传感器、三角聚焦传感器、刀口聚焦传感器、色点传感器、聚焦点恢复传感器(a points from focus sensor)、结构照明显微传感器、聚焦垂直影像对比度传感器(vertical image contrast through focus sensor)、聚焦横向影像对比度传感器(lateral image contrast through focus sensor)、触觉传感器或电容式传感器。不排除其它快速聚焦方法。
根据实施例,来自所述预映射传感器的所述粗糙高度图包括多个合并、重叠或接合的来自所述预映射传感器的各测量结果。
理想地,预映射传感器会产生粗糙高度图。注意,快速单点聚焦传感器通过结合多个测量结果或多个传感器的阵列也能够用来创建高度图。可以连接预映射传感器的多个视野以增大可测量区域。
预映射传感器高度图结果的关注区域被细分为高精度高度图传感器视野的尺寸的连接或者重叠区域。预映射传感器高度图可以用于为使用第二较高精度光学轮廓仪的后续测量确定合适的聚焦扫描开始和结束位置。在优化配置中,系统可以首先全部使用预映射传感器映射关注区域,然后切换至高精度传感器以用较高的精度映射相同区域。两个传感器的视野可以不同,但是本方法不限于此。使用两个传感器的好处是预映射数据用于确保在扫描距离上优化了较慢的较高精度方法,从而能够获取测量速度和稳定性的大幅提高。另外一个关键因素是这种组合测量方案非常适合自动化。
然而,不排除其它优化较少的测量方案。也不排除单视野的测量,因为这样也有利于为了快速和稳定的自动聚焦的目的而使用第一传感器。
可以使用高精度扫描3D光学分析方法完成后续高精度高度测量,所述高精度扫描3D光学分析方法包括:结构性光照明分析、聚焦点恢复分析、旋转盘(Nipkow)共聚焦分析、单点共聚焦分析、数字全息术分析、干涉分析。不排除其它快速高度光学高度映射方法。
所有具有高精度传感器的任意预映射传感器的不同组合都是可以的。预映射传感器可以与高精度传感器共享部分相同的光学路径。
如果最终高精度高度图重叠,则使用高度图拼合方法将它们合并成一幅较大的高度图。如果高精度高度图相连,则可以直接将它们合并成一幅较大的高度图。
如果最终高精度高度图没有重叠并且没有相连,则可以通过对它们之间的间隙进行插值来合并成一幅较大的高度图。
如果高度漂移大,则在第二扫描时从预映射数据获取的预测扫描范围可能不充足,测量可能失败。通过使用预映射数据和最后一次高精度高度扫描之间的偏移量的补偿来先取得这些误差。
根据实施例,所述测试表面相对于所述光学轮廓仪的移动由X、Y和Z测试台驱动。
以这种方式可以将测试表面的不同区域定位在光学轮廓仪设备下方。在任何情况下,可能都需要计算机控制的(X、Y、Z)移动系统相对于传感器来移动测试样本。可以在(X、Y、Z)方向移动样本或者在(X、Y、Z)方向移动传感器。然而其它方案也是可以的。例如,可以在XY方向移动样本并且在Z方向移动传感器。也可以在Z方向移动样本并且在XY方向移动传感器。不排除其它动作的组合。
根据实施例,用于计算在X、Y和Z方向上的轨迹的方法包括使得所述高分辨率的光学轮廓仪传感器测量所述多个部分的高度图的顺序随机化。
在拼合多个重叠的视野时可能会产生倾斜误差。如果在系统的高度漂移和视野的测量顺序之间存在较强的相关性,则发生这种误差。这种高度漂移可能由环境温度变化或者由在光路或其它子系统中进行内部的(机械或电子)加热引起。通过随机测量视野,可以使得这种影响最小化。在预映射聚焦策略中,能够使得测量高精度高度图视野的顺序随机化。
根据实施例,用于计算在X、Y和Z方向上的轨迹的方法包括对所述轨迹进行排序。
通过对所述轨迹进行排序,使得整个测试表面的测量时间最小化。
根据实施例,将所述粗糙高度图细分为多个部分以适合于所述高分辨率的光学轮廓仪传感器的视野,导致所述多个部分重叠或相邻。
根据实施例,计算所述高分辨率的光学轮廓仪传感器在X、Y和Z方向上的轨迹包括从所述粗糙高度图中减去所述预映射传感器和所述高分辨率的光学轮廓仪传感器之间的经过校准的距离。
高垂直分辨率传感器和预映射传感器可以完全分开,因为传感器之间的(X、Y、Z)偏移量能够得到很好的校准。
根据实施例,测量所述测试表面的第一部分的高精度高度图包括在所述高分辨率的光学轮廓仪传感器的焦点范围内扫描所述测试表面。
根据实施例,所述高分辨率的光学轮廓仪传感器为白光干涉测量传感器、移相干涉测量传感器、波长扫描干涉测量传感器、共聚焦传感器、聚焦点恢复传感器、结构照明显微传感器中的一个。
根据实施例,提供了:
使得用户能够观看由所述预映射传感器所创建的图像;
使得用户能够从所述预映射传感器所创建的图像中选择关注区域或者取消对关注区域的选择,以例如避免拼合问题。
在拼合重叠区域时,如果在重叠区域中存在丢失或错误数据,则将会发生拼合误差。通常,丢失或错误数据可能由以下原因造成:样本反射率的局部差异、超出光学系统的角度限制的局部采样角度、或者在样本中的大台阶的阴影效果。通过预映射数据的分析能够消除拼合问题区域。这打开了在用光学轮廓仪进行最终扫描期间预先获取这些拼合误差的可能性。通过增加额外的视野、针对光学轮廓仪切换视野、或者以不同强度反复测量并合并关注区域,能够通过测量在重叠区域中确实存在无效数据来避免拼合问题。
根据实施例,预映射传感器包括三角测量传感器。预映射传感器可以包括将辐射光束引导到测试表面上的辐射系统,以及接收测试表面的辐射光束的反射的检测器。检测器上的接收到在检测器上的反射的位置是预映射传感器和测试表面之间的距离的指示。
辐射系统可以是灯、发光二极管、或者激光。辐射系统可以提供宽带辐射光束。
根据实施例,预映射传感器包括例如使用Foucault结构的刀口聚焦传感器。
根据实施例,预映射传感器包括色点(chromatic point)传感器。
根据实施例,预映射传感器包括触觉传感器。
根据实施例,预映射传感器包括电容式传感器。
根据实施例,预映射传感器包括共聚焦型传感器。
在一个实施例中,高精度光学轮廓仪可以是干涉仪设备。为了生成样本的测试表面的干涉信号,包括:
宽带照射器,以提供宽带照射光束;
分束器,以经由具有焦点范围的目标将带宽照射光束分束为用于在参考反射镜上反射的参考光束和用于在测试表面上反射的测量光束;
检测器,以接收由从参考反射镜反射的参考光束和从测试表面反射的测量光束之间的干涉而创建的干涉信号;
计算机控制的精确(X、Y、Z)测试台,以相对于检测器定位样本。也可以移动检测器。也可以组合样本和传感器移动。
干涉仪设备可以是例如宽带干涉仪,例如,Mirau、Michelson和/或Linnik干涉仪设备。
在参考光束的距离与测量光束的距离相等的情况下,检测器所接收到的干涉信号具有最大值。扫描部件可以将测试表面和设备之间的距离在该最大值上下改变几百微米的视野,以确定该表面的高度图。设备因此具有在此最大值附近有限的焦距深度,并且在不具有测试表面所在位置的粗糙表示的情况下,在扫描部件的扫描范围内获取测试表面可能需要时间。
在一个实施例中,高精度3D传感器可以是旋转盘共聚焦(Nipkov)设备、可编程阵列共聚焦设备、或者单点共聚焦设备。
在一个实施例中,高精度3D传感器可以是聚焦形状恢复(Shape From Focus(SFF))传感器,也被称为聚焦点恢复(Points From Focus(PFF))传感器。
在一个实施例中,高精度传感器可以是结构照明设备。照射光束可以在垂直于照射光束的光轴的至少两个方向具有正弦空间模式,该照射光束移动至不同的空间模式位置。可以在不同的扫描位置沿着所述光轴来扫描测试表面。后续的空间模式位置之间的移动距离和后续的扫描位置之间的扫描距离存在固定的关系。在具有相应空间模式位置的空间模式的扫描位置检测由表面反射的光。
在一个实施例中,高精度光学轮廓仪可以是数字全息设备。
在一个实施例中,高精度光学轮廓仪可以是具有比预映射传感器的精度高的任意光学轮廓仪。
根据进一步实施例,提供了一种用于使用多传感器光学轮廓仪来测量测试表面的高度图的方法,包括:
使用设置在光学轮廓仪的预映射传感器来照射测试表面的部分;
使用所述预映射传感器来测量从测试表面的部分接收的辐射强度;
结合所测量的辐射强度和与预映射传感器和高分辨率光学轮廓仪传感器的照射特性有关的先验信息,能够计算使用高分辨率光学轮廓仪传感器来照射测试表面的部分所需要的照射设置;
作为选择,计算照射在该部分的辐射和从该部分接收的辐射的比率;结合此比率和与预映射传感器和高分辨率光学轮廓仪传感器的照射特性有关的先验信息,能够计算使用高分辨率光学轮廓仪传感器来照射测试表面的部分所需要的照射设置;
使用高分辨率光学轮廓仪传感器以所需要的照射设置来照射测试表面的部分;以及
使用高分辨率光学轮廓仪传感器来测量高精度高度图。
通过计算照射在该部分的辐射和从该部分接收的辐射强度的比率,能够确定测试表面的部分如何散射和/或反射辐射。
通过使用此比率(或者更简单地说,预映射传感器所测量的原始照射强度)和先验信息,以计算使用高分辨率光学轮廓仪传感器来照射测试表面的部分所需要的照射设置,在高分辨率光学轮廓仪传感器处接收合适的辐射变得更容易。因此可以省略确定所需要的照射而使用高分辨率光学轮廓仪传感器的试验性测量,以节省时间和增加光学轮廓仪的生产率。
可以将比率、预映射传感器照射等级、先验信息、所需要的照射设置等存储在存储器中。在使用高分辨率光学轮廓仪传感器进行测量期间,可以从存储器中取回比率、预映射传感器照射等级、先验信息、或者所需要的照射设置。
预映射传感器可以包括共聚焦传感器、三角聚焦传感器、刀口聚焦传感器、色点传感器、聚焦点/形状恢复传感器、结构照明显微镜传感器、聚焦垂直影像对比度传感器、或聚焦横向影像对比度传感器。高分辨率光学轮廓仪传感器可以为白光干涉测量传感器、移相干涉测量传感器或波长扫描干涉测量传感器、共聚焦传感器、聚焦点恢复传感器、或结构照明显微镜传感器。
附图说明
以下将参考示意附图,通过示例的方式描述本发明的实施例,其中附图中相应的附图标记表示相应的部件,并且其中:
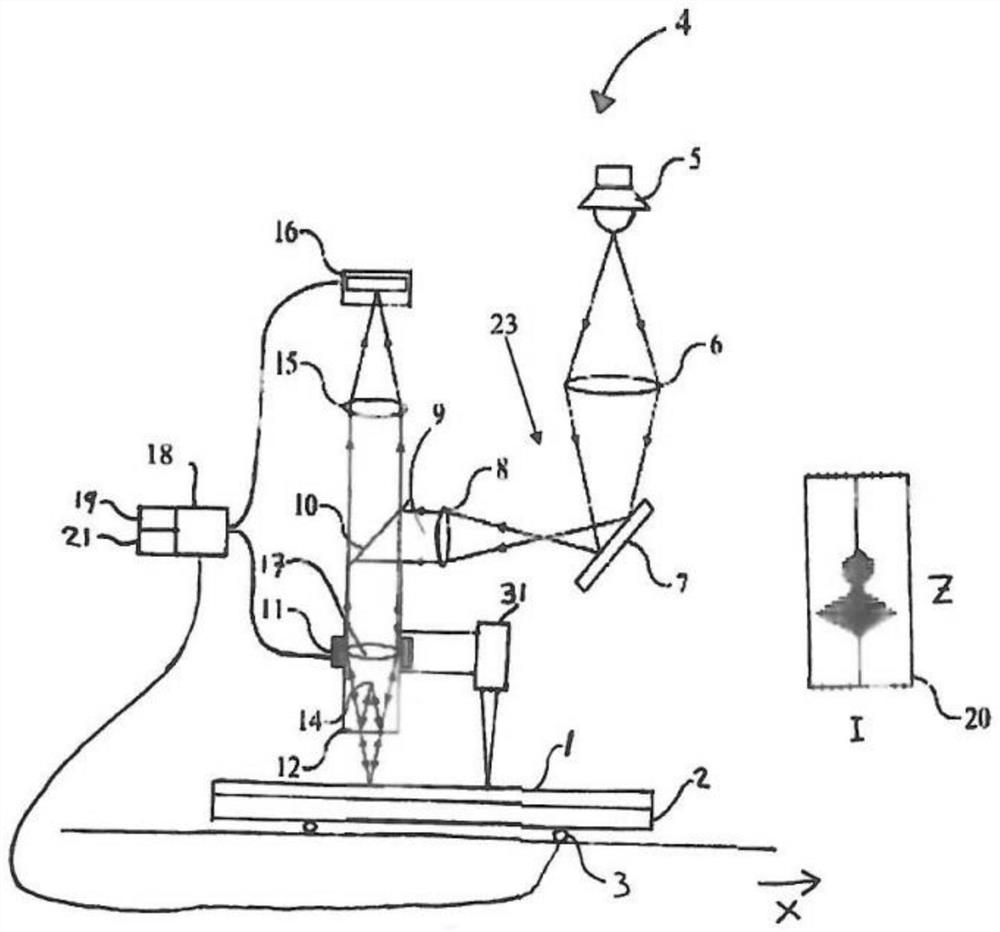
图1示出根据实施例的干涉仪设备;
图2示出来自预映射传感器的、显示可以从中选取关注区域的一些相邻区域的图;
图3示出如何可以将所需要的视野自动分布于关注区域;
图4示出后续如何取消选定视野、或者通过用户动作创建额外的视野;
图5示出如何通过用户动作调整视野的位置和重叠百分比;
图6a至6f示出如何能够使用所述方法进行真正的测量。
具体实施方式
图1描述了根据实施例的用于确定样本属性的干涉仪设备4。所描述的干涉仪设备是Mirau干涉仪。可选地,也可以使用Michelson和/或Linnik干涉仪。也可以使用其它光学轮廓仪。
设备4可以包括宽带照射器23以提供宽带照射光束9。宽带照射器可以包括宽带照射源5、第一透镜6、第一镜7和第二透镜8,以提供宽带照射光束9。宽带照射光束可以平行。宽带照射光束9可以反射到第二分束器10上并在到达用于将宽带照射光束分束为参考光束和测量光束的分束器12之前穿过物镜17。
参考光束可以反射到参考镜14上。测量光束可以从样本1的测试表面反射。从参考镜14反射的光束可以在分束器12上再次反射。从样本1的测试表面反射的光束可以穿过分束器12。参考光束和测量光束可以发生干涉,并且穿过物镜17、第二分束器10和透镜15,到达检测器16。可以利用检测器16来测量干涉光束的强度。
参考镜14、物镜17和分束器12可以共同形成Mirau物镜,并且可以被扫描仪11沿着物镜17的光轴而相对于样本1进行扫描。
可以读出检测器16的各像素信号以获取如图1中的框20中描述的相关图,该相关图描述了作为样本的Z-位置Z的函数的所接收强度I。因此设备可以设置有控制器18,用于针对各像素接收表示在检测器16上接收的干涉辐射强度的信号和来自扫描仪11的距离信号,并将两者结合至所接收的相关图20,该相关图20针对各像素显示作为来自样本1的扫描距离的函数的干涉辐射强度。控制器18可以基于所接收的相关图来计算高精度高度图。
干涉仪设备可以设置有用于测量样本1的测试表面和预映射传感器31之间(例如,在Z方向)的距离和高度变化的预映射传感器31。样本1可以设置在样本台2上,该样本台2可以通过电机3、例如平面电机或X-Y测试台(X-Y stage)在垂直于Z方向的X、Y方向上移动。
预映射传感器31可以是用于创建测试表面的图像的诸如CCD相机或任意其它成像装置等的图像传感器。测试表面的图像一方面可以用于检查测试表面,另一方面可以测量测试表面和图像传感器之间的距离。
图像传感器可以可操作地连接至处理器,以将由图像传感器创建的图像处理成在焦点范围的方向上测试表面和图像传感器之间的距离。处理器可以计算从测试表面接收的图像的对比度。例如,可以通过移动样本而改变所计算的对比度,并且通过处理器可以将上述变化处理成测试表面和图像传感器之间的距离。使用图像对比度的变化是测量测试表面和图像传感器之间的距离的相当简单的方式。
预映射传感器31可以是三角聚焦传感器、刀口聚焦传感器、色点传感器、共聚焦传感器、聚焦垂直影像对比传感器、聚焦横向影像对比传感器、触觉传感器、电容式传感器。三角聚焦传感器可以包括将照射光束引导至测试表面的辐射系统,以及接收测试表面的辐射光束的反射的检测器。检测器上的接收到在测试表面上的反射的位置是预映射传感器和测试表面之间的距离的指示。辐射系统可以是灯、发光二极管、或者激光。辐射系统可以提供宽带辐射光束。
预映射传感器31可以包括例如使用Foucault结构的刀口聚焦传感器。
预映射传感器可以包括色点传感器。这种传感器的示例在作为参考包含在这里的US专利US 8194251B2中描述。
预映射传感器包括触觉传感器或电容式传感器。
预映射传感器可以包括共聚焦型传感器。这种传感器的示例在作为参考包含在这里的US专利US 20130271995A1中描述。
通过聚焦驱动器、例如扫描仪11可以在Z方向上移动干涉仪设备4和预映射传感器31。预映射传感器31可以测量样本2的测试表面和该预映射传感器31之间的距离。可以将所测量的距离传送到连接至预映射传感器的控制器18中。控制器18可以将所测量的距离与存储在控制器的存储器19中并可能被预校准过的干涉仪设备4的扫描范围进行比较。控制器18也可以控制扫描仪11在Z方向上移动干涉仪设备4,以将样本1的测试表面带入至干涉仪设备4的扫描范围内。控制器18也可以在X方向上(如果需要,还可以在Y方向上)控制电机3,以将之前位于聚焦传感器31下方的区域带入至干涉仪设备4的物镜17下方。物镜和预映射传感器31之间的距离因此可以得以校准并存储在控制器18的存储器中。之前位于预映射传感器31下方的测试表面一旦位于物镜17下方,干涉仪设备4可以开始从宽带照射器23照射测试表面,并且扫描仪11可以在干涉仪设备4的焦点范围内扫描样本的测试表面。可以在检测器16上创建的作为Z扫描的函数的干涉图案可以创建相关图20。
在上述实施例中,在样本台2在X和Y方向上可移动的情况下,干涉仪设备4和预映射传感器31在Z方向上可移动。可选地,干涉仪设备4可以如下构建:干涉仪设备和预映射传感器31在X、Y和Z方向上可移动,而样本台2可以是固定的。
可选地,样本台2在X、Y和Z方向上可移动,以使得干涉仪设备4和预映射传感器31没必要移动。聚焦驱动器因此可以在Z方向上移动样本和样本台。也可以是如下情况,样本台和干涉仪设备4均在Z方向上可移动,例如样本台2通过聚焦驱动器在Z方向上可以跨相当大的范围移动,而扫描仪11则只能跨相当小的范围移动干涉仪设备4。
在设备的使用期间,通过设置在干涉仪设备4上的预映射传感器31,可以测量测试表面的第一部分的Z方向上的粗糙高度图。随后,将在垂直于Z方向的X、Y方向上相对样本1的测试表面来将光学轮廓仪移动至测试表面的随后部分。将再一次通过预映射传感器测量出测试表面的随后部分的Z方向上的粗糙高度图。根据可能存储在存储器19中的第一部分和随后部分的粗糙高度图,可以通过设置在控制器18上的计算部21,考虑光学轮廓仪的焦点范围,来计算出光学轮廓仪相对于测试表面在X、Y、Z方向上的轨迹。
根据所述轨迹在X、Y、Z方向上相对于测试表面来移动光学轮廓仪。通过光学轮廓仪来测量测试表面的第一部分和随后部分的高精度高度图。可以将Z方向上的粗糙高度图存储在设置在控制器18的存储器19中作为测试表面的第一部分或随后部分的X、Y位置的函数。在X、Y、Z方向上移动光学轮廓仪期间,可以使用例如扫描仪11等的聚焦驱动器以在Z方向上相对于光学轮廓仪移动测试表面。
在计算光学轮廓仪相对于测试表面在X、Y、Z方向上的轨迹之前,可以校准预映射传感器31和光学轮廓仪的焦点范围之间的距离。可以将校准的预映射传感器和光学轮廓仪的焦点范围之间的距离存储在设置在控制器18的存储器19中。计算光学轮廓仪在X、Y、Z方向上的轨迹可以包括:计算部21从粗糙高度图中减去存储在存储器19中的校准的预映射传感器和光学轮廓仪的焦点范围之间的距离。针对后续部分重复该方法直到测量了样本1的整个测试表面。
如所描述的,光学轮廓仪是白光干涉测量设备,然而也可以使用诸如移相干涉测量装置或波长扫描干涉测量装置等的其它光学轮廓仪。
用于上述示例性设备的控制软件可以是基于图形用户界面(GUI)的。这将允许展示来自预映射传感器31的粗糙高度图,或者,在图像传感器用作预映射传感器的情况下,展示来自图像传感器的较大视野的图像。如图2中所示,能够展示来自预映射传感器的一些相邻视野41的显示。软件可以允许在屏幕上的交互来选择将要通过高精度高度图光学轮廓仪(在本示例中,为干涉仪)来测量的视野43。这可以通过用户动作来完成关注区域的选择。
接下来,可以将干涉仪的所需视野45自动地分配得适合于关注区域(图3)。针对通过干涉仪的测量的所需视野可能在区域47中重叠,以使得能够在测量之后拼合。重叠的程度可以是固定的,作为预映射传感器视野内的栅格呈现重叠区域。不期望的视野49可以随后通过用户动作来取消选择,或者通过相同的方式选择根据期望创建的附加视野51(图4)。
可选地,(如果有期望)可以经由用户动作53被用户指定位置和重叠百分比,以尽可能地允许灵活性(图5)并且例如避免带有大的高度差异的相邻视野的拼合问题。也可以选择不变的重叠百分比55。
所提及的用于选择或取消选择的用户动作可以是但不局限为点击、点击和拖动、按键、使用操纵杆、触摸和轻触、或者与控制硬件和软件的其它任意这种交互。
图6a至6f描述了如何能够使用所述方法进行真正的测量。在图6a中,设置在光学轮廓仪上的预映射传感器所测量的四个测量高度图61合并成图6b中的粗糙高度图63并存储在存储器中。将图6b的粗糙高度图细分为多个部分65,以适合于设置于光学轮廓仪的相对高分辨率的光学轮廓仪传感器的视野(参见图6c)。接下来,计算高分辨率光学轮廓仪传感器相对于测试表面的相应地X、Y和Z位置和高分辨率光学轮廓仪传感器相对于测试表面在X、Y和Z方向上的轨迹。根据所述轨迹,在X、Y和Z方向上相对于测试表面移动光学轮廓仪,并且通过高分辨率光学轮廓仪传感器测量高精度高度图67(图6d)直到测量了整个高精度高度图测试表面,并将各自的视野合并(图6e)。可以通过高度图来拟合平面,并且可以从高精度高度图中减去所拟合的平面来提高分辨率(图6f)。
需要理解的是,所公开的实施例仅是本发明的示例,可以采用各种表现形式。因此,这里所公开的具体结构和功能的细节不解释为限制,而仅作为权利要求书的基础和代表性基础,来启示本领域技术人员采用任何适当的详细结构来在实际中利用各种方式实施本发明。此外,这里使用的术语和短语并非为了限制,而是为本发明提供可以理解的描述。
文中所使用的术语“一”或“一个”含义为一个或一个以上。文中所使用的术语另一或随后含义为至少第二个或更多。文中所使用的术语包括和/或具有含义为包括(即,不排除其他元素或步骤)。权利要求中的任何参考符号不应被解释为对权利要求或本发明的范围的限定。事实上,某些方法被不同的从属权利要求相互引用,这并不表示不能采用这些方法的组合来表现优势。本发明的范围仅通过所附权利要求书来限定。
- 测量测试表面的高度图的方法
- 测量测试表面的高精度高度图的方法