多轴重型车用机械式全轮转向系统
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及汽车转向领域,尤其是多轴重型越野汽车领域,具体涉及一种多轴重型车用机械式全轮转向系统。
背景技术
目前多轴重型汽车主要采用前桥转向的形式,后桥一般不参与转向活动,这导致重型汽车不能很好地适应一些特殊工况,较大的转弯半径使车辆的道路通过性较差,这大大限制了多轴重型汽车的应用与发展。而且越野汽车所行驶的路面情况较差,传统的转向器的布置形式为转向器输入轴直接与转向管柱相连接,在颠簸路面受路面冲击影响极易损坏,无法满足转向器的安全使用。
目前实现全轮转向的方法主要采用电控液压助力的形式,由ECU控制的液压阀和液压缸控制轮胎的偏转,实现车辆转向的功能,但是此种方式对控制系统精度要求很高,并且其组件占用空间较大,布置较为困难且需经常检修、维护,无法在长时间内保证其可靠性、安全性。
发明内容
本发明要解决的问题是提供一种多轴重型车用机械式全轮转向系统,具有较好的道路通过性和转向灵活性,在安全可靠的基础上实现全轮转向以减小车辆的转弯半径。
本发明是通过以下技术方案实现的:
一种多轴重型车用机械式全轮转向系统,包括传递方向盘扭矩的转向轴系总成和起助力作用的转向液压装置总成,所述转向轴系总成和转向液压装置总成安装在纵梁支撑总成上;
所述转向液压装置总成包括多个转向液压组件,每个转向液压组件连接有多个轮边拉杆。
进一步的,所述纵梁支撑总成包括左右对称分布的纵梁支撑架Ⅰ和纵梁支撑架Ⅱ,所述转向轴系总成安装在所述纵梁支撑架Ⅰ上;
所述转向轴系总成包括依次连接的输入轴总成Ⅰ、角传动器Ⅰ和输入轴总成Ⅱ,所述输入轴总成Ⅱ回旋安装在所述纵梁支撑架Ⅰ上,所述角传动器Ⅰ安装在所述纵梁支撑架Ⅰ上。
进一步的,所述转向液压组件包括主转向器、T型角传动器、随动转向器和两套联动组件;所述T型角传动器安装在所述输入轴总成Ⅱ上,所述主转向器安装在所述纵梁支撑架Ⅰ底部,所述T型角传动器的输出端通过连接杆连通所述主转向器的输入端;所述两套联动组件分别对称安装在所述纵梁支撑架Ⅰ和纵梁支撑架Ⅱ上,所述联动组件包括前转向摆臂、后转向摆臂总成、前过渡杆、过渡摆臂总成和后过渡杆,所述前转向摆臂连接在所述主转向器/随动转向器的输出端上,所述过渡摆臂总成和后转向摆臂总成转动连接在所述纵梁支撑架Ⅰ/纵梁支撑架Ⅱ上,所述前过渡杆的一端铰接在所述前转向摆臂上、另一端铰接在所述过渡摆臂总成上,所述后过渡杆的一端铰接在所述后转向摆臂总成上、另一端铰接在所述过渡摆臂总成上;所述前转向摆臂和后转向摆臂总成的一端均铰接有轮边拉杆;所述两个后转向摆臂总成通过连接拉杆铰接为一体。
进一步的,所述主转向器和随动转向器均为液压动力转向器。
进一步的,所述输入轴总成Ⅱ是由多节轴段通过万向节连接而成,所述输入轴总成Ⅱ的中间为过渡轴总成。
进一步的,所述过渡轴总成包括转向过渡轴、锁紧螺母、转向轴套和固定在所述纵梁支撑架Ⅰ的支架,所述转向轴套套设在所述转向过渡轴上,所述转向轴套通过锁紧螺母固定在所述支架上,在所述转向轴套上设有用于加注黄油的黄油嘴。
进一步的,所述轮边拉杆、前过渡杆和后过渡杆均为可调节长度的转向拉杆,所述转向拉杆包括杆身和两个球头插销,所述两个球头插销分别螺纹连接在所述杆身的左右两端并配合螺母固定。
本发明与现有技术相比所取得的有益效果如下:
1、本发明拥有全轮转向的功能,有效地减小了车辆的转弯半径,拥有良好的道路通过性,为多轴独立悬架式的越野汽车提供一种全轮转向布置形式;
2、在转向液压组件中,具有主转向器和随动转向器,有效地叠加了液压的输出力,使重型越野汽车的转向更为灵便;采用纯机械传动的形式极大地保障了转向系统的稳定性;本发明有助于延长转向系统关键部件的使用寿命,增加了行车的安全性;
3、轮边拉杆、前过渡杆和后过渡杆均为可调节长度的转向拉杆,转向拉杆包括杆身和两个球头插销,为调整转向拉杆长度和球头角度提供了便利,拥有良好的装配性;
4、本发明拥有模块化的发展方向,一套转向液压装置可供至多轴转向使用,不考虑车长的因素,理论上在合适位置转向液压组件可实现更多轴车辆全轮转向的功能,在简化设计难度的基础上,以最小的成本实现多轴车辆全轮转向的功能。
附图说明
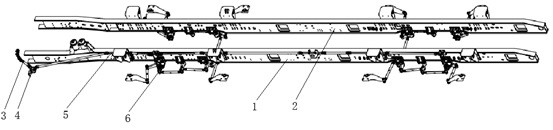
图1为本发明所述多轴重型车用机械式全轮转向系统结构示意图;
图2为本发明所述转向轴系总成结构示意图;
图3为本发明所述转向液压组件结构示意图;
图4为本发明所述过渡轴总成结构示意图;
图5为本发明所述转向拉杆结构示意图;
图中:1、纵梁支撑架Ⅰ,2、纵梁支撑架Ⅱ,3、输入轴总成Ⅰ,4、角传动器Ⅰ,5、输入轴总成Ⅱ,6、转向液压组件,61、主转向器,62、T型角传动器,63、随动转向器,7、前转向摆臂,8、后转向摆臂总成,9、前过渡杆,10、过渡摆臂总成,11、后过渡杆,12、过渡轴,13、转向轴套,14、支架,15、轮边拉杆。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在发明的描述中,需要理解的是,术语“前”、“后”、“左”、“右”、 “上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
以应用在四轴车为例,如图1所示,本实施例公开一种多轴重型车用机械式全轮转向系统,其包括传递方向盘扭矩的转向轴系总成和起助力作用的转向液压装置总成,转向轴系总成和转向液压装置总成安装在纵梁支撑总成上。纵梁支撑总成包括左右对称分布的纵梁支撑架Ⅰ1和纵梁支撑架Ⅱ2,其中,转向轴系总成安装在纵梁支撑架Ⅰ1上,如图2-4所示,转向轴系总成包括依次连接的输入轴总成Ⅰ3、角传动器Ⅰ4和输入轴总成Ⅱ5,输入轴总成Ⅱ5通过支撑座回旋安装在纵梁支撑架Ⅰ1上,角传动器Ⅰ4安装在纵梁支撑架Ⅰ1前端侧面上。转向轴系总成之间均用万向节连接,通过万向节的相位角匹配计算,布置在传动力矩波动影响最小的位置。
输入轴总成Ⅱ5是由多节轴段通过万向节连接而成,输入轴总成Ⅱ5的中间为过渡轴总成。过渡轴总成包括转向过渡轴12、锁紧螺母、转向轴套13和固定在纵梁支撑架Ⅰ的支架14,转向轴套13套设在转向过渡轴12上,转向轴套13通过锁紧螺母固定在支架14上,在转向轴套13上设有用于加注黄油的黄油嘴。通过黄油嘴向转向轴套13中加注过量黄油,以使过渡轴12在转向轴套13中充分润滑,起到减小零件磨损,减小驾驶员手力阻力的作用。
转向液压装置总成包括两套转向液压组件6,每套转向液压组件6包括主转向器61、T型角传动器62、随动转向器63和两套联动组件,其中,主转向器61和随动转向器63均为液压动力转向器。T型角传动器62安装在输入轴总成Ⅱ5上,主转向器61安装在纵梁支撑架Ⅰ1底部,T型角传动器62的输出端通过连接杆连通主转向器61的输入端。为了方便安装和维修,两套联动组件分别对称安装在纵梁支撑架Ⅰ1和纵梁支撑架Ⅱ2上,每套联动组件包括前转向摆臂7、后转向摆臂总成8、前过渡杆9、过渡摆臂总成10和后过渡杆11,前转向摆臂7连接在主转向器61/随动转向器63的输出端上,过渡摆臂总成10和后转向摆臂总成8转动连接在纵梁支撑架Ⅰ1/纵梁支撑架Ⅱ2上,前过渡杆9的一端铰接在前转向摆臂7上、另一端铰接在过渡摆臂总成10上,后过渡杆11的一端铰接在后转向摆臂总成8上、另一端铰接在过渡摆臂总成10上。前转向摆臂7和后转向摆臂总成8的一端均铰接有用于连接车轮的轮边拉杆15,两个后转向摆臂总成8通过连接拉杆铰接为一体。如此设计,每套转向液压组件6都采用U型传动的形式,实现转向液压装置总成控制车轮转向。
轮边拉杆、前过渡杆9和后过渡杆11均为可调节长度的转向拉杆,如图5所示,转向拉杆包括杆身和两个球头插销,左边的球头插销上加工左旋螺纹,右边的球头插销上加工有右旋螺纹,杆身的左端与左边的球头插销螺纹配合,杆身的右端与右边的球头插销螺纹配合。球头插销与杆身螺纹配合调节到合适长度时,配合螺母锁紧固定。如此设计,方便调节球头插销的旋转角度,且能微调整体的长度。
本发明所述多轴重型车用机械式全轮转向系统具体工作过程如下:
驾驶员通过方向盘传来的扭矩,传到输入轴总成Ⅰ上,经过角传动器Ⅰ改期其传动方向后将扭矩传递到输入轴总成Ⅱ上,扭矩继续传递到前后两个T型角传动器上,由于前后两套转向液压组件结构相同,作用原理相同,在此只描述前方的转向液压组件的工作过程。扭矩传动到T型角传动器后,改变传动方向,通过连接杆传动到主转向器,主转向器带带动前转向摆臂摆动,前转向摆臂通过前过渡杆和后过渡杆带动后转向摆臂总成一同摆动,后转向摆臂总成通过连接拉杆带动另一套联动组件的后转向摆臂总成摆动,最终传动到随动转向器上。使整个转向液压组件形成一个U型传动的形式,从而使两个前转向摆臂和两个后转向摆臂总成分别通过轮边拉杆控制车轮转向。
本发明拥有全轮转向的功能,有效地减小了车辆的转弯半径,拥有良好的道路通过性,为多轴独立悬架式的越野汽车提供一种全轮转向布置形式;本发明拥有模块化的发展方向,一套转向液压装置可供至多轴转向使用,不考虑车长的因素,理论上在合适位置转向液压组件可实现更多轴车辆全轮转向的功能,在简化设计难度的基础上,以最小的成本实现多轴车辆全轮转向的功能。
- 多轴重型车用机械式全轮转向系统
- 双向驱动多编组电车及其多轴全轮转向控制方法和系统