基于交叉路口场景的车辆碰撞可能性确定
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及基于交叉路口场景的车辆碰撞可能性确定。
背景技术
车辆(例如,汽车、卡车、建筑设备、农业设备、自动化工厂设备)越来越多地使用传感器来获取关于车辆及其环境的信息。传感器信息有助于车辆操作的增强或自动化。示例性传感器包括摄像头、无线电探测和测距(雷达)系统以及光探测和测距(激光雷达)系统。例如,当车辆接近交叉交通的交叉路口时,使用一个或多个传感器获得的信息可以有助于向驾驶员发出警报或自动操纵。然而,传感器信息本身可能并不完全可靠。因此,期望提供基于交叉场景的车辆碰撞可能性的确定。
发明内容
在一个示例性实施例中,一种确定车辆碰撞可能性的方法包括:使用处理器识别车辆正在接近的具体交叉路口,并使用处理器确定车辆驾驶员经过用于通过所述具体交叉路口的具体路径的意图。该方法还包括:针对车辆通过具体交叉路口的具体路径识别相关区域的被遮挡部分。在相关区域内行进的对象将与车辆的具体路径相交,并且车辆的一个或多个传感器被阻挡而无法在相关区域的被遮挡部分中进行检测。基于相关区域的被遮挡部分提供警报或实施行动。
除了本文描述的一个或多个特征之外,该方法还包括确定通过多个交叉路口的多条路径的相关区域。通过多个交叉路口的多条路径包括通过所述具体交叉路口的所述具体路径。
除了本文描述的一个或多个特征之外,识别车辆正在接近的所述具体交叉路口包括,获得车辆的位置和在识别出多个交叉路口的地图上参考车辆的位置。
除了本文描述的一个或多个特征之外,确定车辆驾驶员的意图包括获得驾驶员的按钮或转向信号输入。
除了本文描述的一个或多个特征之外,确定车辆驾驶员的意图包括获得车辆位置相对于提供给驾驶员的路线的信息。
除了本文描述的一个或多个特征之外,该方法还包括使用一个或多个传感器的检测来连续更新相关区域的被遮挡部分。
除了本文描述的一个或多个特征之外,该方法还包括使用一个或多个传感器来记录对象进入相关区域的被遮挡部分。
除了本文描述的一个或多个特征之外,该方法还包括一个或多个传感器没有检测到所述对象从所述相关区域的所述被遮挡部分离开,将所述对象标记为隐藏对象。
除了本文描述的一个或多个特征之外,提供警报包括指示出隐藏对象的存在。
除了本文描述的一个或多个特征之外,实施动作包括自动制动。
在另一个示例性实施例中,确定车辆碰撞可能性的系统包括车辆的一个或多个传感器,其被配置成检测车辆外部的区域,以及处理器,其识别车辆正在接近的具体交叉路口。处理器还确定车辆驾驶员经过用于通过所述具体交叉路口的具体路径的意图,并针对车辆通过具体交叉路口的具体路径识别相关区域的被遮挡部分。在相关区域内行进的对象将与车辆的具体路径相交,并且车辆的一个或多个传感器被阻挡而无法在相关区域的被遮挡部分中进行检测。处理器还根据相关区域的被遮挡部分提供警报或实施行动。
除了本文描述的一个或多个特征之外,处理器确定通过多个交叉路口的多条路径的相关区域,并且通过所述多个交叉路口的多条路径包括通过所述具体交叉路口的所述具体路径。
除了本文描述的一个或多个特征之外,处理器通过获得车辆的位置和在识别出多个交叉路口的地图上参考车辆的位置,识别所述车辆正在接近的所述具体交叉路口。
除了本文描述的一个或多个特征之外,处理器通过获得驾驶员的按钮或转向信号输入来确定车辆驾驶员的意图。
除了本文描述的一个或多个特征之外,处理器通过获得驾驶员的按钮或转向信号输入来确定车辆驾驶员的意图。
除了本文描述的一个或多个特征之外,处理器使用一个或多个传感器的检测来连续更新相关区域的遮挡部分。
除了本文描述的一个或多个特征之外,处理器还使用一个或多个传感器来记录对象进入相关区域的被遮挡部分。
除了本文描述的一个或多个特征之外,处理器还基于一个或多个传感器没有检测到对象从相关区域的被遮挡部分离开,将对象标记为隐藏对象。
除了本文描述的一个或多个特征之外,警报包括隐藏对象存在的指示。
除了本文描述的一个或多个特征之外,动作包括自动制动。
当结合附图时,根据以下详细描述,本公开的上述特征和优点以及其他特征和优点将变得显而易见。
附图说明
其他特征、优点和细节仅作为示例出现在以下详细描述中,详细描述参考附图,其中:
图1是根据一个或多个实施例的车辆的框图,其基于交叉路口场景执行车辆碰撞可能性确定;
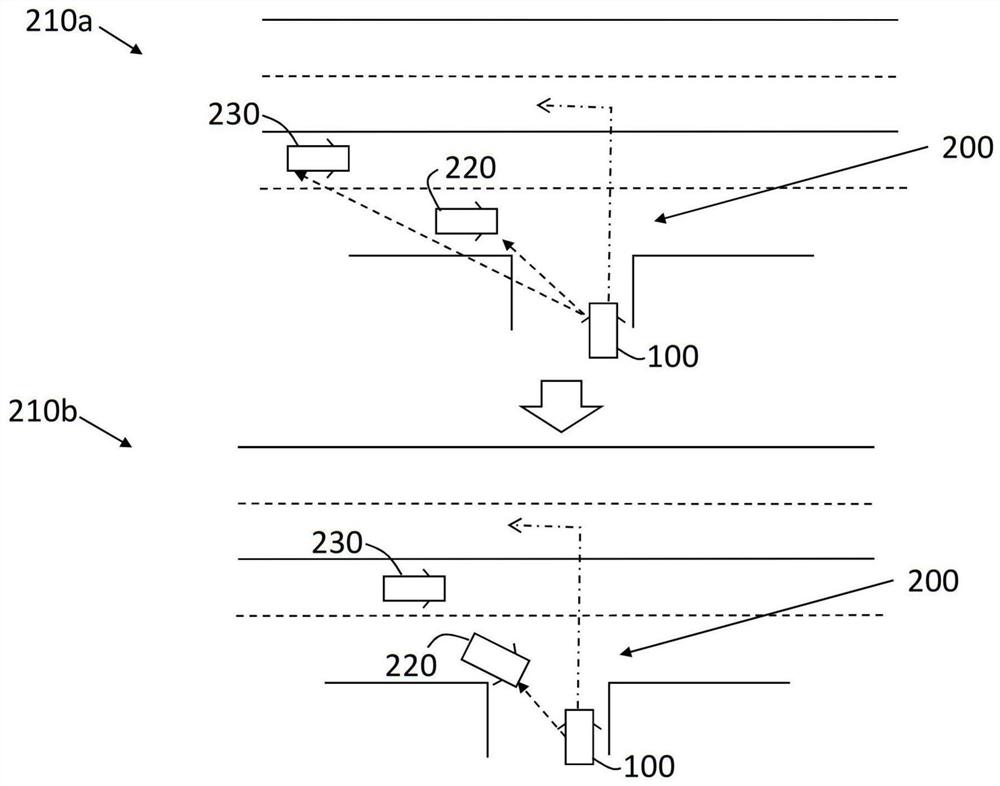
图2是示出根据一个或多个实施例基于交叉路口场景确定车辆碰撞可能性的示例性场景;
图3A、3B和3C描绘了示出根据一个或多个实施例基于交叉场景确定车辆碰撞可能性的额外示例性场景;和
图4是根据一个或多个实施例的基于交叉路口场景执行车辆碰撞可能性确定的方法过程流程。
具体实施方式
以下描述本质上仅仅是示例性的,并不旨在限制本公开、其应用或使用。应当理解,在所有附图中,相应的附图标记表示相似或相应的部件和特征。
如前所述,车辆传感器可以提供有助于提醒驾驶员或自主行动(例如,自动制动、避免碰撞)以避免潜在碰撞的信息。然而,某些情况可能会使传感器在传递准确信息方面无效。本文详述的系统和方法的实施例涉及基于交叉路口场景的车辆碰撞可能性确定。根据一个或多个实施例,解决了影响传感器信息可靠性的隐藏对象(例如,其他车辆)。具体地,检查即将到来的交叉路口的碰撞可能性,该碰撞可能性可能在一个或多个传感器的视野中被遮挡。基于交叉路口,传感器看不到的情况可能与确定存在碰撞的可能性有关。该确定可对驾驶员发出警告或自动规避动作。
根据示例性实施例,图1是车辆100的框图,车辆100基于交叉路口场景210(图2)、310(图3)来执行车辆碰撞可能性的确定。图1所示的示例性车辆100是汽车101。车辆100包括控制器110,控制器110从诸如激光雷达系统120、摄像头130和雷达系统140的传感器获得信息。控制器110还可以通过信息娱乐系统115或与车辆100的驾驶员的其他接口提供信息。车辆100被示出具有全球定位系统(GPS)150,其提供车辆100的位置,并且结合地图信息,可以允许控制器110确定即将到来的交叉路口200(图2)。例如,控制器110可以使用GPS 150和地图来向驾驶员提供路线信息。图1中传感器的示例性数量和位置并不旨在限制替代实施例。控制器110可以发出警报或与车辆系统通信,以基于车辆碰撞可能性的确定来执行自动动作。
控制器110包括处理电路,该处理电路可以包括专用集成电路(ASIC))、电子电路、处理器(共享的、专用的或成组的)和执行一个或多个软件或固件程序的存储器、组合逻辑电路和/或提供所述功能的其他合适的组件。如参考图2和3所详述的,基于交叉路口场景210、310的车辆碰撞可能性的确定指的是,把即将到来的交叉路口200、的从车辆100的任何传感器的视野中被遮挡的部分考虑在内。
图2是示出根据一个或多个实施例基于交叉路口场景210确定车辆碰撞可能性的示例性场景。交叉路口场景210a、210b(通常称为210)表示交叉路口200在两个时刻的状态。继续参照图1讨论车辆100。基于交叉路口场景210a中车辆100和其他车辆220、230的位置,车辆100的摄像头130(例如,位于左侧视镜的摄像头)检测其他两车辆220、230。当车辆100和其他车辆220、230的相对位置改变到交叉路口场景210b中所示的位置时,其他车辆中的一个230在车辆100的任何传感器的视野中被遮挡。因此,在所示示例中,仅基于由一个或多个传感器检测到的信息来确定碰撞可能性是不可靠的。
根据一个或多个实施例,当确定碰撞可能性时,应考虑其他车辆220的后方区域被遮挡的事实。即使其他车辆230从未出现车辆100的摄像头130的视野中,也应如此。也就是说,如果只有其他车辆220被检测到,则事实是该其他车辆220后方的区域仍然被阻挡。根据一个或多个实施例,在确定碰撞可能性时应考虑该隐藏区域。参考图3A至3C进行讨论其他例子。
图3A、3B和3C(总的来说,图3)描绘了根据一个或多个实施例基于交叉场景310a、310b、310c(总的来说,310)确定车辆碰撞可能性的额外示例性场景。图3A示出了交叉路口200处的即将左转的车辆100。当其他车辆中的一个320是可见的并且可由传感器(例如,摄像头130、激光雷达系统120或雷达系统140)检测到时,其他车辆中的另一个330被遮挡。控制器110在确定碰撞可能性时考虑这个隐藏区域。即使从未检测到该其他车辆330(不同于交叉路口场景210a中的其他车辆230),交叉路口场景310a也被考虑用于识别隐藏区域,并因此识别碰撞可能性。
图3B显示了交叉路口场景310b。在交叉路口场景310b中,灌木丛340遮挡了车辆100停止时所在的交叉路口200附近的其他车辆320的视野。在确定碰撞可能性时,考虑了由灌木340产生的隐藏区域。在替代实施例中,建筑物或其他对象可以作为障碍物,而不是灌木340。包括另一车辆330的区域335也在图3B中示出,并且在图4的讨论中被参考。图3C显示了交叉路口场景310c。在交叉路口场景310c中,行人350在车辆100的驾驶员和传感器的视野中被其他车辆320遮挡。基于指示出人行横道355的地图,由其他车辆320创建的隐藏区域被识别,作为结果的碰撞可能性。在每个示例性情况下,GPS150识别相关的交叉路口200,并且可用的地图信息有助于识别产生碰撞可能性的隐藏区域。如参考图4所详述的,更准确地评估碰撞可能性还需要确定驾驶员的意图。例如,如果车辆100向右转而不是向左转,则其他车辆330处于隐藏区域的事实在交叉路口场景310a中是不相关的。
图4是根据一个或多个实施例的基于交叉路口场景210、310来执行车辆碰撞可能性的确定方法400的过程流程。在框410,针对每个交叉路口识别具有碰撞可能性的车辆路径包括几个过程,并且针对每个已知交叉路口先验地实现。例如,地图信息可以用于识别给定的交叉路口200。交叉路口200可以根据类型进行分类(例如,路径仅向左或向右的丁字路口,路径仅向左的交叉路口200,路径笔直、向左或向右的四向交叉路口200)。对于给定类型的交叉路口200,车辆100的不同路径具有不同的碰撞可能性。也就是说,对于车辆100所能通过给定交叉路口的每条路径,可能存在不同的碰撞可能性相关区域。
例如,对于图3A所示的交叉路口200,其为丁字路口,碰撞可能性基于车辆100是向右转还是向左转而不同。如果车辆100向右转,则只有车辆100左侧的视野与避免碰撞相关(即,确定碰撞可能性的相关区域是车辆100在其他车辆320行驶的车道中的左侧)。如果车辆100向左转,如图3A所示,则车辆100的左侧和右侧的视野是相关的,并且其他车辆330行驶的隐藏区域形成碰撞可能性。也就是说,相关区域包括图3A所示的所有四条车道以及这些车道中车辆100的左侧和右侧。通过提前确定车辆100在地图上的不同交叉路口200处的潜在碰撞路径,当GPS150指示车辆100正在接近那些预先考虑的交叉路口200中之一时,可以实时使用该信息。
在框420,实时确定驾驶员的意图包括识别车辆100正在接近的交叉路口200。可以使用GPS150来识别交叉路口200,该GPS150与地图相结合示出了车辆100的位置。确定驾驶员意图可以基于当车辆100接近给定交叉路口200时由驾驶员启动的按钮或转向信号。还可以基于由驾驶员发起的路线导航映射来确定驾驶员对于穿过交叉路口200的路径的意图。这是指驾驶员基于GPS150和地图应用的组合(例如,经由车辆100的信息娱乐系统115)指示目的地并获得路线图。
在框430,实时准确地识别相关的被遮挡视野需要关于即将到来的交叉路口200的信息(来自框410)和关于驾驶员意图的信息(来自框420)。具体地,当车辆100正在接近给定交叉路口200时,车辆100通过该交叉路口200的每条路径的碰撞可能性(在框410处识别)与根据驾驶员意图(在框420处识别)选择的路径相结合,以便实时确定相关区域。
例如,如前所述,其他车辆320、330行驶的区域仅与交叉场景310a中车辆100的左转路径相关(图3A)。然而,在交叉路口场景310b(图3B)中,其他车辆320行驶的区域与车辆100是遵循右转路径还是左转路径相关。通常,相关区域表示合法行进的对象可能出现并与车辆100碰撞的区域(即,在相关区域内行进的对象将与车辆100的路径相交)。因此,人行横道355的存在意味着在图3C中行人350可能出现在车辆的视野中。另外,在其他车辆320行驶的车道中车辆100右侧的区域335(在图3B中)不是相关区域。这是因为,根据合法的交通流,如图3B所示,与其他车辆320在同一车道上但在车辆100右侧的对象(例如,另一车辆330)可能已经经过了车辆100,并且可能并不会出现而与车辆100潜在碰撞。
一旦识别出属于实时场景的相关区域(即,根据驾驶员意图),则持续评估该相关区域的任何部分是否在传感器视野中被遮挡。静止障碍物以及其他移动对象的行为与此评估相关。例如,在交叉场景310b的情况下,右转或左转的相关区域的一部分总是被灌木340遮挡。在交叉路口场景310a的示例性情况下,与其他车辆330相关的区域的部分仅在另一车辆320也存在时被遮挡。如示例所示,如果相关区域的任何部分被遮挡,则存在碰撞可能性。
在框440,确定碰撞可能性(在框430确定)是否增加。通过识别任何先前可见的对象,可以根据框440处的过程来估计潜在碰撞可能性。例如,这指的是参考图2讨论的场景。当先前可见的对象(例如,其他车辆230)进入识别被遮挡的部分时(在框430),该信息由控制器110记录。如果该对象没有离开被遮挡部分,则该对象是相关区域的被遮挡部分中的已知隐藏对象。该隐藏对象的估计速度可用于估计车辆100在交叉路口200处与隐藏对象碰撞的可能性。
在框450,提供警报或实施动作(替代地或额外地)是指几个过程。当车辆100接近交叉路口200时,并且可选地或额外地,在交叉路口200处,可以发出警报。该警报可以指出在相关区域中是否存在隐藏对象(即,检测到进入被遮挡部分部分但没有检测到离开被遮挡部分的对象)。作为警报的替代或补充,可以基于被遮挡部分(在框430)或隐藏对象(在框440)的识别来实现自主动作(例如,自动制动)。
虽然已经参考示例性实施例描述了上述公开,但是本领域技术人员将理解,在不脱离本发明的范围的情况下,可以进行各种改变,并且等同物可以替代其元件。此外,在不脱离本公开的基本范围的情况下,可以进行许多修改以使特定情况或材料适应本公开的教导。因此,意图是本公开不限于所公开的特定实施例,而是将包括落入其范围内的所有实施例。
- 基于交叉路口场景的车辆碰撞可能性确定
- 基于车辆速度和距离的交叉路口碰撞可能性的评估方法