一种调控关节力矩和刚度的功能性电刺激系统和方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及功能性电刺激(FES)技术领域,更具体的,涉及一种调控关节力矩和刚度的功能性电刺激系统和方法。
背景技术
近年来,功能性电刺激技术的发展受到越来越多的关注,它通过外电流的作用,使神经细胞产生一个与自然激发引起的动作电位完全一样的神经冲动,让其支配的肌肉纤维产生收缩,从而获得运动的效果。为了获得期望的关节运动,并尽可能减小康复训练中疲劳产生的影响,需要设计并实现功能性电刺激自适应控制系统,以产生恰当、稳定的肌肉力及相应关节力矩。在功能性电刺激自适应控制系统中,获得实时准确关节力矩信号是关键。很多研究为了简化控制系统的硬件机械部分和使用复杂度,建立了模型来模拟电刺激肌肉所产生的关节力矩。Hunt在带有FES的鲁棒控制系统中使用线性二阶模型估计电刺激产生的肌肉力矩来帮助受试者保持稳定的站姿。Freeman等人在FES控制系统中建立了Hammerstein模型估计电刺激产生的肌肉力矩,以帮助受损对象完成椭圆轨迹跟踪任务。
另一方面,关节刚度作为关节力矩的主要组成部分,主要由同时激活的拮抗肌肉对来调节,会随着人体运动而变化。前人发现同时激活一对拮抗肌肉可以增加关节刚度,但也会减少净关节力矩。在步态中,踝关节刚度在下肢功能,包括姿势稳定、推进、转向和运动过程中的能量吸收起到重要作用。目前有研究基于肌电信号建立模型来估计关节刚度,用于变刚度的康复机器人的研究。关节刚度的调控对于抵抗外界环境的干扰、适应外界环境的变化和维持自身关节的稳定十分重要。
公开号为CN109106339A的中国发明专利申请于2019年1月1日公开了一种功能性电刺激下肘关节力矩的在线估计方法,通过离线采集电刺激下关节力矩、角度、角速度数据,对肌肉骨骼模型进行预建模,然后实时采集电刺激下关节角度和角速度信号,对预建模的肌肉骨骼模型系统参数进行实时自适应更新,实现对力矩的在线估计。但其主要是通过离线数据构建在线预测模型,通过在线预测模型实现对肘关节力矩信号的在线估计,缺乏量化电刺激对关节力矩和刚度作用的模型,无法对关节刚度进行调控,在实际应用中稳定性不足。
发明内容
本发明为克服现有的功能性电刺激技术在应用过程中,存在无法对关节刚度进行调控,稳定性不足的技术缺陷,提供一种调控关节力矩和刚度的功能性电刺激系统和方法。
为解决上述技术问题,本发明的技术方案如下:
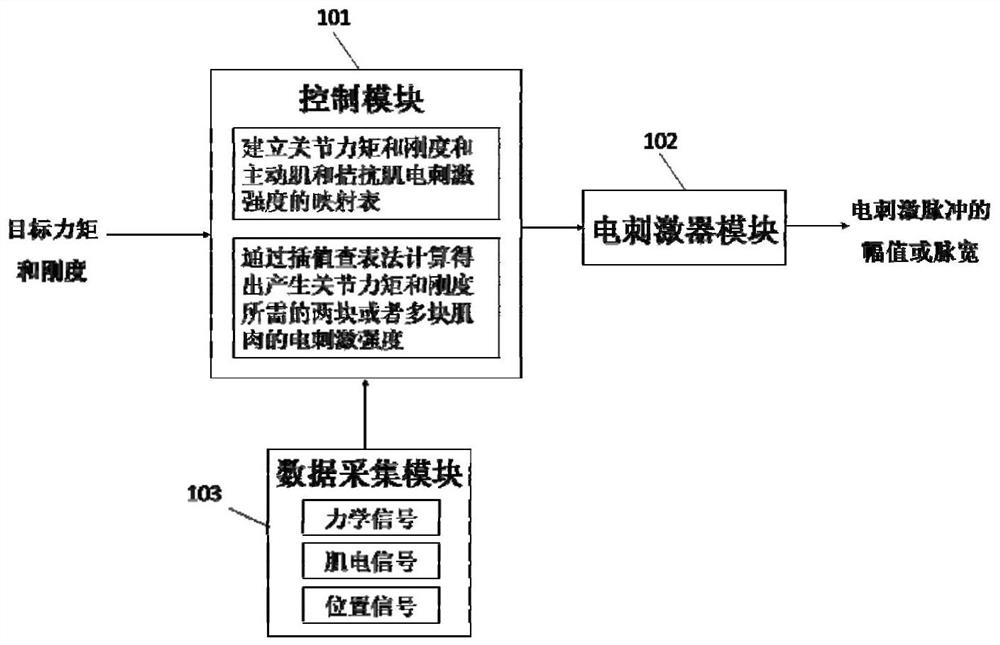
一种调控关节力矩和刚度的功能性电刺激系统,可以通过电刺激一对主动肌和拮抗肌,产生期望的力矩和刚度,具体包括控制模块、电刺激器模块、数据采集模块;其中:
所述控制模块用于实时为所述电刺激器模块发送强度信号,其中包括一个关节力矩和刚度的预测模型,用于生成关节力矩和刚度和主动肌和拮抗肌电刺激强度的映射表,还包括一个插值查找表算法,寻找目标关节角度和关节力矩所需要的电刺激强度,并将此电刺激强度信号传给电刺激器模块;
所述电刺激器模块主要由电刺激器和电极片及其配套的导线构成,用于产生电刺激脉冲电流传递给人体肌肉;
所述数据采集模块用于采集关节的肌电、力矩和角度信号并传输至所述控制模块;
在所述控制模块上的关节力矩和刚度的预测模型包括以下4个子模型:刺激电流强度到肌肉兴奋性映射模型、肌肉骨骼几何模型、肌力模型和关节模型;其中:
所述刺激电流强度到肌肉兴奋性映射模型根据所述电刺激器模块所产生的电刺激强度进行计算,得到肌肉兴奋性;
所述肌肉骨骼几何模型根据所述数据采集模块采集的肌电、角度信号进行计算,得到肌肉肌腱长度和肌力臂;
所述肌力模型根据肌肉兴奋性和肌肉肌腱长度进行计算,得到肌肉力;
所述关节模型根据肌肉力和肌力臂进行计算,得到关节力矩和关节刚度;
所述功能性电刺激系统通过调控电刺激器模块的电刺激强度实现对关节力矩和关节刚度实时调控。
其中,所述控制模块还构建有用于校准所述肌肉骨骼几何模型的关节肌肉兴奋模型;其中:
将计算得到的关节力矩和实际由所述数据采集模块采集到的力矩信号输入至所述的关节力矩和刚度的预测模型;通过最小化调参目标函数,完成对于所述的关节力矩和刚度的预测模型校准。
上述方案中,本系统建立了一种电刺激调控关节力矩和刚度的肌肉骨骼模型,使其能根据电刺激强度和关节角度估计肌肉力,结合关节模型,最终可估计关节力矩和刚度。
上述方案中,本系统利用肌电、角度和力矩信号,对肌肉骨骼模型参数进行离线校准,实现电刺激下踝关节力矩和刚度的实时调控。其主要用途是针对脑卒中下肢康复训练。建立符合电刺激下的神经肌肉骨骼动态特性的模型,为功能性电刺激系统的安全、稳定和精确的控制提供基础。
一种调控关节力矩和刚度的功能性电刺激方法,包括以下步骤:
S1:通过刺激电流强度到肌肉兴奋性映射模型对电刺激强度进行计算,得到肌肉兴奋性;
S2:根据数据采集模块采集的肌电、角度信号,利用肌肉骨骼几何模型进行进行计算,得到肌肉肌腱长度和肌力臂;
S3:将肌肉兴奋性和肌肉肌腱长度作为输入导入到肌力模型中,计算得到肌肉力;
S4:根据肌力臂和肌肉力,通过关节模型进行计算,得到关节力矩和关节刚度;
S5:将得到的关节力矩和关节刚度与数据采集模块实际采集的力矩、刚度信号进行线性回归分析,获取关节力矩和关节刚度中的权重因子和偏差值;
S6:根据权重因子和偏差值对肌肉骨骼几何模型、关节模型进行校准,完成系统模型的构建,并建立关节力矩和刚度和主动肌和拮抗肌电刺激强度的映射表;
S7:根据插值查找表算法,寻找目标关节角度和关节力矩所需要的电刺激幅值。
其中,在所述步骤S1中,所述刺激电流强度到肌肉兴奋性映射模型对电刺激强度进行计算具体过程为:
其中,a是肌肉兴奋性,a∈[0,1];g
其中,在所述步骤S3中,所述肌肉骨骼几何模型计算公式具体为:
其中,A为肌肉在骨头上的起始点,B为肌肉在骨头上的嵌入点,O为关节中心,q为关节角度,l
其中,在所述步骤S4中,所述肌力模型计算过程具体包括:
1)主动收缩成分所产生的力F
F
其中,f(l)和f(v)分别是主动收缩成分的力-长度关系和力-速度关系,F
f(l)=sin(-1.317l
2)被动收缩成分所产生的力F
F
其中,f
3)肌腱弹性成分的力学特性F
其中,l
4)因为主动收缩成分与被动弹性成分属于并联关系,随后它们与肌腱弹性成分呈串联关系,所以它们之间的力大小存在如下关系:
F
其中,F
至此,可以求得实时的肌纤维长度,再根据所得肌纤维长度求解肌纤维主动收缩成分和被动弹性成分所产生的力的大小,最后以求得肌肉单元所产生的肌肉力。
其中,在所述步骤S4中,所述关节模型包括关节力矩模型和关节刚度模型,具体为:
1)关节力矩模型
其中M
2)关节刚度模型
其中,K
其中,在所述步骤S5中,通过关节肌肉兴奋模型对肌肉骨骼几何模型进行校准,具体为:
首先,由肌电信号得到神经兴奋性信号,具体为:
u(t)=αe(t-d)-β
(α=0.9486,β
其中,e(t)为预处理后的t时刻的肌电信号,u(t)则为t时刻的神经兴奋性信号,d被描述为肌电延时;α、β
神经兴奋性信号与肌肉兴奋性信号a(t)之间的关系具体为:
对公式进行微分且保证在节点处连续,即算出系数b,c,m和n的值;肌电信号通过关节肌肉兴奋模型后,得到肌肉兴奋性信号;通过各个模型的计算后,得到估计的关节力矩;通过最小化关节力矩和实测力矩间的误差,得到个性化的参数,具体公式如下:
其中,M
其中,所述系数b,c,m和n的计算公式具体为:
更具体的,在所述步骤S5中,肌电延时d设置为80ms。
其中,在所述步骤S6中,完成了关节力矩和刚度的预测模型的构建,此模型表示为(M
其中,在所述步骤S7中,根据目标关节力矩和角度寻找对应的电刺激强度。如果查找表没有目标关节力矩和刚度对应的电刺激强度,则对表格进行线性内插:将目标关节力矩M
其中
与现有技术相比,本发明技术方案的有益效果是:
本发明提出一种调控关节力矩和刚度的功能性电刺激系统和方法,利用肌电、角度和力矩信号,对肌肉骨骼模型参数进行离线校准,实现电刺激下踝关节力矩和刚度的实时调控。本发明主要用途是针对脑卒中下肢康复训练。建立符合电刺激下的神经肌肉骨骼动态特性的模型,为功能性电刺激系统的安全、稳定和精确的控制提供基础。
附图说明
图1为本发明提供的调控关节力矩和刚度的功能性电刺激系统示意图;
图2为本发明提供的电刺激调控力矩和刚度模型的结构框架图;
图3为本发明所述方法流程示意图;
图4为本发明提供的肌肉骨骼模型图;
图5为本发明提供的单块肌肉实验输入和输出结果图;
图6为本发明提供的一对拮抗肌中电刺激强度和关节力矩的关系;
图7为本发明提供的一对拮抗肌中电刺激强度和关节刚度的关系;
图8为本发明提供的实验装置示意图;
图9为本发明提供的肌电-力矩模型的结构框架图。
具体实施方式
附图仅用于示例性说明,不能理解为对本专利的限制;
为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
下面结合附图和实施例对本发明的技术方案做进一步的说明。
实施例1
如图1所示,本发明提供了一种调控关节力矩和刚度的功能性电刺激系统,它可以通过电刺激一对主动肌和拮抗肌,产生期望的力矩和刚度。下面以一个具体的实验来验证本发明实施例提供的调控关节力矩和刚度的功能性电刺激系统的可行性,具体为:包括控制模块、电刺激器模块、数据采集模块;其中:
所述控制模块用于实时为所述电刺激器模块发送强度信号,其中包括一个关节力矩和刚度的预测模型,用于生成关节力矩和刚度和主动肌和拮抗肌电刺激强度的映射表,还包括一个插值查找表算法,寻找目标关节角度和关节力矩所需要的电刺激强度,并将此电刺激强度信号传给电刺激器模块;
所述电刺激器模块主要由电刺激器和电极片及其配套的导线构成,用于产生电刺激脉冲电流传递给人体肌肉;
所述数据采集模块用于采集关节的肌电、力矩和角度信号并传输至所述控制模块;
在所述控制模块上的关节力矩和刚度的预测模型包括以下4个子模型:刺激电流强度到肌肉兴奋性映射模型、肌肉骨骼几何模型、肌力模型和关节模型;其中:
所述刺激电流强度到肌肉兴奋性映射模型根据所述电刺激器模块所产生的电刺激强度进行计算,得到肌肉兴奋性;
所述肌肉骨骼几何模型根据所述数据采集模块采集的肌电、角度信号进行计算,得到肌肉肌腱长度和肌力臂;
所述肌力模型根据肌肉兴奋性和肌肉肌腱长度进行计算,得到肌肉力;
所述关节模型根据肌肉力和肌力臂进行计算,得到关节力矩和关节刚度;
所述功能性电刺激系统通过调控电刺激器模块的电刺激强度实现对关节力矩和关节刚度实时调控。
更具体的,所述控制模块还构建有用于校准所述肌肉骨骼几何模型的关节肌肉兴奋模型;其中:
将计算得到的关节力矩和实际由所述数据采集模块采集到的力矩信号输入至所述的关节力矩和刚度的预测模型;通过最小化调参目标函数,完成对于所述的关节力矩和刚度的预测模型校准。
在具体实施过程中,本系统建立了一种电刺激调控关节力矩和刚度的肌肉骨骼模型,如图2所示,使其能根据电刺激强度和关节角度估计肌肉力,结合关节模型,最终可估计关节力矩和刚度。
在具体实施过程中,本系统利用肌电、角度和力矩信号,对肌肉骨骼模型参数进行离线校准,实现电刺激下踝关节力矩和刚度的实时调控。其主要用途是针对脑卒中下肢康复训练。建立符合电刺激下的神经肌肉骨骼动态特性的模型,为功能性电刺激系统的安全、稳定和精确的控制提供基础。
实施例2
更具体的,在实施例1的基础上,如图3所示,提供一种调控关节力矩和刚度的功能性电刺激方法,包括以下步骤:
S1:通过刺激电流强度到肌肉兴奋性映射模型对电刺激强度进行计算,得到肌肉兴奋性;
S2:根据数据采集模块采集的肌电、角度信号,利用肌肉骨骼几何模型进行进行计算,得到肌肉肌腱长度和肌力臂;
S3:将肌肉兴奋性和肌肉肌腱长度作为输入导入到肌力模型中,计算得到肌肉力;
S4:根据肌力臂和肌肉力,通过关节模型进行计算,得到关节力矩和关节刚度;
S5:将得到的关节力矩和关节刚度与数据采集模块实际采集的力矩、刚度信号进行线性回归分析,获取关节力矩和关节刚度中的权重因子和偏差值;
S6:根据权重因子和偏差值对肌肉骨骼几何模型、关节模型进行校准,完成系统模型的构建,并建立关节力矩和刚度和主动肌和拮抗肌电刺激强度的映射表;
S7:根据插值查找表算法,寻找目标关节角度和关节力矩所需要的电刺激幅值。
在具体实施过程中,通过肌肉最大自主收缩力测试实验校准关节力矩和刚度的预测模型,得到个性化参数l
在具体实施过程中,通过刚度测量实验对关节模型校准。主动肌在不同的电刺激强度下,测量各个主动肌和拮抗肌的力矩和刚度,对实测的力矩和刚度与估计的力矩和刚度进行线性回归分析,得到各个主动肌和拮抗肌分别在关节力矩和关节刚度中的权重因子和偏差值。
更具体的,在所述步骤S1中,所述刺激电流强度到肌肉兴奋性映射模型对电刺激强度进行计算具体过程为:
其中,a是肌肉兴奋性,a∈[0,1];g
更具体的,在所述步骤S2中,所述肌肉骨骼几何模型计算公式具体为:
其中,A为肌肉在骨头上的起始点,B为肌肉在骨头上的嵌入点,O为关节中心,q为关节角度,l
更具体的,在所述步骤S3中,所述肌力模型如图4所示,计算过程具体包括:
1)主动收缩成分所产生的力F
F
其中,f(l)和f(v)分别是主动收缩成分的力-长度关系和力-速度关系,F
f(l)=sin(-1.317l
2)被动收缩成分所产生的力F
F
其中,f
3)肌腱弹性成分的力学特性F
其中,l
4)因为主动收缩成分与被动弹性成分属于并联关系,随后它们与肌腱弹性成分呈串联关系,所以它们之间的力大小存在如下关系:
F
其中,F
至此,可以求得实时的肌纤维长度,再根据所得肌纤维长度求解肌纤维主动收缩成分和被动弹性成分所产生的力的大小,最后以求得肌肉单元所产生的肌肉力。
更具体的,在所述步骤S4中,所述关节模型包括关节力矩模型和关节刚度模型,具体为:
1)关节力矩模型
其中M
2)关节刚度模型
其中,K
更具体的,在所述步骤S5中,通过关节肌肉兴奋模型对肌肉骨骼几何模型进行校准,具体为:
首先,由肌电信号得到神经兴奋性信号,具体为:
u(t)=αe(t-d)-β
(α=0.9486,β
其中,e(t)为预处理后的t时刻的肌电信号,u(t)则为t时刻的神经兴奋性信号,d被描述为肌电延时;α、β
神经兴奋性信号与肌肉兴奋性信号a(t)之间的关系具体为:
对公式进行微分且保证在节点处连续,即算出系数b,c,m和n的值;肌电信号通过关节肌肉兴奋模型后,得到肌肉兴奋性信号;通过各个模型的计算后,得到估计的关节力矩;通过最小化关节力矩和实测力矩间的误差,得到个性化的参数,具体公式如下:
其中,M
更具体的,所述系数b,c,m和n的计算公式具体为:
更具体的,在所述步骤S5中,肌电延时d设置为80ms。
其中,在所述步骤S6中,完成了关节力矩和刚度的预测模型的构建,并此模型表示为(M
在所述步骤S7中,根据目标关节力矩和角度寻找对应的电刺激强度。如果查找表没有目标关节力矩和刚度对应的电刺激强度,则对表格进行线性内插:将目标关节力矩M
其中
在具体实施过程中,本方案利用肌电、角度和力矩信号,对肌肉骨骼模型参数进行离线校准,实现电刺激下踝关节力矩和刚度的实时调控。主要用途是针对脑卒中下肢康复训练。建立符合电刺激下的神经肌肉骨骼动态特性的模型,为功能性电刺激系统的安全、稳定和精确的控制提供基础。
实施例3
更具体的,一个受试者的一块肌肉在电刺激强度变化如图5的“输入信号”的三角形波的刺激信号下,其能导致关节产生如图5的“输出力矩和刚度”的关节力矩和刚度。对于同时电刺激胫骨前肌和腓肠肌的情况,电刺激强度和关节力矩的关系如图6所示,电刺激强度和关节刚度的关系如图7所示。
通过肌肉最大自主收缩力测试实验校准刚度和力矩预测模型,得到个性化参数l
1)肌肉兴奋性模型。
2)肌肉骨骼几何模型。
3)肌力模型。
4)关节模型。
进一步地,肌电信号通过肌肉兴奋性模型后,得到肌肉兴奋性信号。结合肌肉骨骼几何模型、肌力模型、关节模型,可得到模型估计的力矩。通过最小化估计力矩和实测力矩间的误差,可以得到个性化的参数,即误差方程;当误差方程取值最小时,校准的参数的取值则为最终值。
接着,通过刚度测量实验对关节模型校准。刚度测量实验要求控制电机带动脚踏板产生一个幅度为0.75°、频率为3Hz的正弦位置扰动。扰动试验在3种情况下进行:(1)仅电刺激胫骨前肌,得到胫骨前肌激活下的踝关节刚度和稳力矩;(2)仅电刺激腓肠肌,得到腓肠肌激活下的踝关节刚度和力矩;(3)同时电刺激胫骨前肌和腓肠肌,得到胫骨前肌和腓肠肌共激活下的踝关节刚度和力矩。在实验中,记录电机提供给脚踏板的力矩、脚踏板的角度和踝关节力矩。电机提供给脚踏板的力矩τ
其中
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 一种调控关节力矩和刚度的功能性电刺激系统和方法
- 一种基于并联分载原理的机器人高刚度关节力矩传感器