地图匹配方法、地图匹配模型的确定方法及装置
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及计算机技术领域,更具体地,涉及一种地图匹配方法、地图匹配模型的确定方法及装置。
背景技术
地图匹配(Map Matching)技术利用电子地图和定位信息来确定车辆在道路上的准确位置,其基本思想是将定位装置获得的车辆定位轨迹与电子地图数据库中的道路信息联系起来,并由此确定车辆相对于地图的位置。目前,地图匹配通常采用HMM(HiddenMarkov Model,隐马尔可夫模型)。在现有的HMM模型进行地图匹配时,影响转移概率的多种特征(例如距离、方向、速度等)是相互独立的,忽略了各特征的关联性可能带来的影响,导致地图匹配准确率较低。
发明内容
有鉴于此,本发明实施例提供了一种地图匹配方法、地图匹配模型的确定方法及装置,以通过将位置数据中的多个特征进行融合,提高地图匹配的准确性。
第一方面,本发明实施例提供一种地图匹配方法,所述方法包括:
根据目标任务对应的位置点确定至少一个候选路段;
将所述位置点的位置数据输入至地图匹配模型的第一子模型中进行处理,获取各所述候选路段对应的第一参数,所述位置数据至少包括所述位置点与候选路段的关联信息;
将所述位置点的位置数据输入至地图匹配模型的第二子模型中进行拟合处理,获取各所述候选路段对应的第二参数;
根据各所述候选路段的第一参数和第二参数确定各所述候选路段的选择参数;
根据各所述候选路段的选择参数确定目标路段;
其中,所述第二子模型的训练样本数据根据所述第一子模型的数据处理结果进行标注确定。
可选的,所述位置数据包括位置点数据、所述位置点与各所述候选路段的距离、所述位置点的速度、各所述候选路段的限速信息、所述位置点的运动方向与各所述候选路段的方向的夹角信息中的一项或多项。
可选的,所述第一子模型为隐马尔可夫模型,所述第二子模型为XGBoost模型。
可选的,所述训练样本数据包括正样本数据和负样本数据;
所述第二子模型的训练样本数据通过以下步骤确定:
对于一个样本,将所述样本的位置数据输入至所述第一子模型,确定所述样本对应的各候选路段的选择参数;
将选择参数大于第一参数阈值的候选路段信息确定为正样本数据;
将选择参数小于第二参数阈值的候选路段信息确定为负样本数据。
可选的,根据各所述候选路段的第一参数和第二参数确定各所述候选路段的选择参数包括:
计算所述候选路段的第一参数、所述第二参数和前一个位置点对应的目标路段的选择参数的乘积,确定所述候选路段的选择参数。
第二方面,本发明实施例提供一种地图匹配模型的确定方法,所述方法包括:
将各样本的位置数据输入至所述地图匹配模型的第一子模型,确定各所述样本对应的各候选路段的选择参数,所述样本的位置数据至少包括所述样本的位置点与对应候选路段的关联信息;
根据各所述选择参数对各所述样本的各候选路段进行标注以确定所述地图匹配模型的第二子模型的训练样本数据;
根据所述训练样本数据训练所述第二子模型,以确定所述地图匹配模型。
可选的,所述训练样本数据包括正样本数据和负样本数据;
根据各所述选择参数对各所述样本的各候选路段进行标注以确定所述地图匹配模型的第二子模型的训练样本数据包括:
将选择参数大于第一参数阈值的候选路段信息标注为正样本数据;
将选择参数小于第二参数阈值的候选路段信息标注为负样本数据。
可选的,所述第一子模型为隐马尔可夫模型,所述第二子模型为XGBoost模型。
第三方面,本发明实施例提供一种地图匹配装置,所述装置包括:
候选路段确定单元,被配置为根据目标任务对应的位置点确定至少一个候选路段;
第一参数获取单元,被配置为将所述位置点的位置数据输入至地图匹配模型的第一子模型中进行处理,获取各所述候选路段对应的第一参数,所述位置数据至少包括所述位置点与候选路段的关联信息;
第二参数获取单元,被配置为将所述位置点的位置数据输入至地图匹配模型的第二子模型中进行拟合处理,获取各所述候选路段对应的第二参数;
选择参数确定单元,被配置为根据各所述候选路段的第一参数和第二参数确定各所述候选路段的选择参数;
目标路段确定单元,被配置为根据各所述候选路段的选择参数确定目标路段;
其中,所述第二子模型的训练样本数据根据所述第一子模型的数据处理结果进行标注确定。
第四方面,本发明实施例提供一种地图匹配模型的确定装置,所述装置包括:
第一处理单元,被配置为将各样本的位置数据输入至所述地图匹配模型的第一子模型,确定各所述样本对应的各候选路段的选择参数,所述样本的位置数据至少包括所述样本的位置点与对应候选路段的关联信息;
样本数据确定单元,被配置为根据各所述选择参数对各所述样本的各候选路段进行标注以确定所述地图匹配模型的第二子模型的训练样本数据;
训练单元,被配置为根据所述训练样本数据训练所述第二子模型,以确定所述地图匹配模型。
第五方面,本发明实施例提供一种电子设备,所述电子设备包括存储器和处理器,其中,所述存储器用于存储一条或多条计算机程序指令,其中,所述一条或多条计算机程序指令被所述处理器执行以实现如本发明实施例第一方面所述的方法和/或本发明实施例第二方面所述的方法。
第六方面,本发明实施例提供一种计算机可读存储介质,其上存储计算机程序指令,所述计算机程序指令在被处理器执行时以实现如本发明实施例第一方面所述的方法和/或本发明实施例第二方面所述的方法。
第七方面,本发明实施例提供一种计算机程序产品,当所述计算机程序产品在计算机上运行时,使得所述计算机执行如本发明实施例第一方面所述的方法和/或本发明实施例第二方面所述的方法。
本发明实施例提供了一种地图匹配方法、地图匹配模型的确定方法及装置,根据目标任务对应的位置点确定候选路段,将位置点的位置数据输入至地图匹配模型的第一子模型中进行处理,获取各候选路段对应的第一参数,将位置点的位置数据输入至地图匹配模型的第二子模型中进行拟合处理,获取各所述候选路段对应的第二参数,根据各候选路段的第一参数和第二参数确定各候选路段的选择参数,根据各候选路段的选择参数确定目标路段,其中,第二子模型的训练样本数据根据所述第一子模型的数据处理结果进行标注确定,由此,可以通过将位置数据中的多个特征进行融合,以提高地图匹配的准确性。
附图说明
通过以下参照附图对本发明实施例的描述,本发明的上述以及其它目的、特征和优点将更为清楚,在附图中:
图1是本发明实施例的地图匹配模型的确定方法的流程图;
图2是本发明实施例的地图匹配方法的流程图;
图3是本发明实施例的地图匹配方法的过程示意图;
图4是本发明实施例的地图匹配模型的确定装置的示意图;
图5是本发明实施例的地图匹配装置的示意图;
图6是本发明实施例的电子设备的示意图。
具体实施方式
以下基于实施例对本发明进行描述,但是本发明并不仅仅限于这些实施例。在下文对本发明的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。为了避免混淆本发明的实质,公知的方法、过程、流程、元件和电路并没有详细叙述。
此外,本领域普通技术人员应当理解,在此提供的附图都是为了说明的目的,并且附图不一定是按比例绘制的。
除非上下文明确要求,否则在说明书的“包括”、“包含”等类似词语应当解释为包含的含义而不是排他或穷举的含义;也就是说,是“包括但不限于”的含义。
在本发明的描述中,需要理解的是,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在采用HMM模型的地图匹配应用中,GPS点形成的轨迹可以作为HMM模型中的观测序列,所求的路段序列作为HMM模型中的隐藏序列。其中,HMM模型的核心是发射概率和转移概率,进而得到用于确定目标路段的维特比概率。
发射概率可以是以下几个影响因子相乘得到:GPS点到路段的距离(距离影响因子)、GPS点前进方向和路段的方向差(方向差影响因子)、GPS点的速度和路段限速值的差异等(速度差影响因子)。影响因素:(1)GPS点到路段中心距离较远时,发射概率的距离影响因子越低,反之则高。(2)GPS点和路段方向差距较大时,发射概率的方向差影响因子较低,反之则高。(3)GPS点的速度与路段速度最高限速差距较大时,发射概率的速度差影响因子较低,反之则高。
转移概率即指从上一个点到这一个点的前进过程中,从上一个点对应的某个路段到这个点对应的某个路段的发生概率。转移概率的因素因子如下:(1)两个GPS点的距离及其对应路段上的两个投影点的距离差(距离差影响因子)越大,则转移概率越低,反之则高。(2)两个GPS点对应的投影点的方向差(方向差影响因子)越大,则转移概率越低,反之则高。(3)两个GPS点对应的速度差(速度差影响因子)越大,则转移概率越低,反之则高。
在现有的HMM模型进行地图匹配时,通常将影响转移概率的多种特征对应的转移概率进行相乘,也即假设几项特征是相互独立的,其并不影响其他特征的转移概率的计算,但显然,影响转移概率的多种特征之间存在相互关联,彼此之间存在相互影响。由此,现有的地图匹配方法无法综合发挥各个特征的效果,地图匹配的准确性较低。由此,本发明实施例提供一种地图匹配模型的确定方法以及基于该地图匹配模型进行地图匹配的方法,以通过将位置数据中的多个特征进行融合,从而提高地图匹配的准确性。
图1是本发明实施例的地图匹配模型的确定方法的流程图。如图1所示,本实施例的地图匹配模型的确定方法包括以下步骤:
步骤S110,将各样本的位置数据输入至地图匹配模型的第一子模型,确定各样本对应的各候选路段的选择参数。其中,样本的位置数据至少包括所述样本的位置点与对应候选路段的关联信息,选择参数用于表征候选路段被选择的概率。可选的,样本的位置数据可以包括历史导航任务的位置点(例如GPS点序列)、该位置点与对应的候选路段的距离、该位置点的速度信息、候选路段的限速信息、该位置点的运动方向与对应的候选路段的方向夹角信息等。
在一种可选的实现方式中,第一子模型可以为现有用于地图匹配的HMM模型,选择参数为维特比概率。步骤S110包括:将样本的位置数据输入至HMM模型中进行处理,确定该样本对应的各候选路段的维特比概率,也即选择参数。在HMM模型中,根据样本的位置数据确定该样本对应的各候选路段的发射概率和转移概率,根据发射概率、转移概率以及该样本的前一个位置点对应的目标路段的维特比概率确定各候选路段的维特比概率。可选的,在地图匹配过程中,一般通过获取定位装置采集的GNSS点序列,对返回的GNSS点序列执行删除异常点或者补充缺失点等预处理,然后根据预处理后的GNSS点序列进行地图匹配处理。其中,相邻GNSS点对应的目标路段肯定是相关的,例如属于同一路段或者可直接转移的路段,HMM模型可以根据GNSS点序列中相邻的GNSS点进行地图匹配,提高了地图匹配效率。
步骤S120,根据各选择参数对各样本的各候选路段进行标注以确定地图匹配模型的第二子模型的训练样本数据。在一种可选的实现方式中,训练样本数据包括正样本数据和负样本数据,步骤S120包括:将选择参数大于第一参数阈值的候选路段信息标注为正样本数据,将选择参数小于第二参数阈值的候选路段和信息标注为负样本数据。在其他可选的实现方式中,将选择参数大于第一参数阈值且在对应的历史导航任务中被采纳的候选路段的信息确定为正样本数据,将选择参数小于第二参数阈值且未被采纳的候选路段的信息确定为负样本数据。本实施例并不对正负样本的具体确定方式进行限制。可选的,第一参数阈值大于或等于第二参数阈值。可选的,正样本数据包括该候选路段对应的位置点的位置数据和转移概率等信息,负样本数据包括该候选路段应的位置点的位置数据和转移概率等信息。位置点的位置数据包括该位置点与对应的候选路段的距离、该位置点的速度信息、候选路段的限速信息、该位置点的运动方向与对应的候选路段的方向夹角信息等。
步骤S130,根据训练样本数据训练第二子模型,以确定地图匹配模型。
在一种可选的实现方式中,第二子模型为XGBoost模型,XGBoost是一种提升树模型,它将许多树模型集成在一起,形成一个很强的分类器。在XGBoost模型中,每次添加一个树,相当于学习一个新函数,去拟合上次预测的残差。本实施例采用XGBoost模型,通过确定多个特征对转移概率所带来的影响来确定转移概率,这使得多个特征是通过拟合确定对应的转移概率,而不是独立确定后进行乘积获得对应的转移概率,由此,可以有效利用多个特征,提高地图匹配的效率。
可选的,本实施例的XGBoost模型基于预定的损失函数通过正负样本所组成的训练集进行训练,以使得XGBoost模型输出的正样本的概率趋近于该正样本对应的转移概率,输出的负样本的概率趋近于该负样本对应的转移概率。由此,在本实施例中,训练完成的XGBoost模型输出的概率可以作为对应候选路段的转移概率。可选的,本实施例采用用于分类的交叉熵作为损失函数。
可选的,XGBoost模型的目标函数为:
其中,
应理解,本实施例以HMM模型和XGBoost模型为例进行说明,其他现有地图匹配模型和分类模型(例如GBDT模型、SVM等)也可以作为本实施例的第一子模型和第二子模型,本实施例并不对此进行限制。
由此,本实施例通过地图匹配模型中的第一子模型确定各所述样本对应的各候选路段的选择参数,根据各选择参数对各样本的各候选路段进行标注以确定地图匹配模型的第二子模型的训练样本数据,根据训练样本数据训练第二子模型,以确定地图匹配模型。由此,本实施例的地图匹配模型可以通过确定多个特征对转移概率所带来的影响来确定转移概率,这使得多个特征是通过拟合确定对应的转移概率,而不是独立确定后进行乘积获得对应的转移概率,因此,可以有效利用多个特征,提高地图匹配的效率。
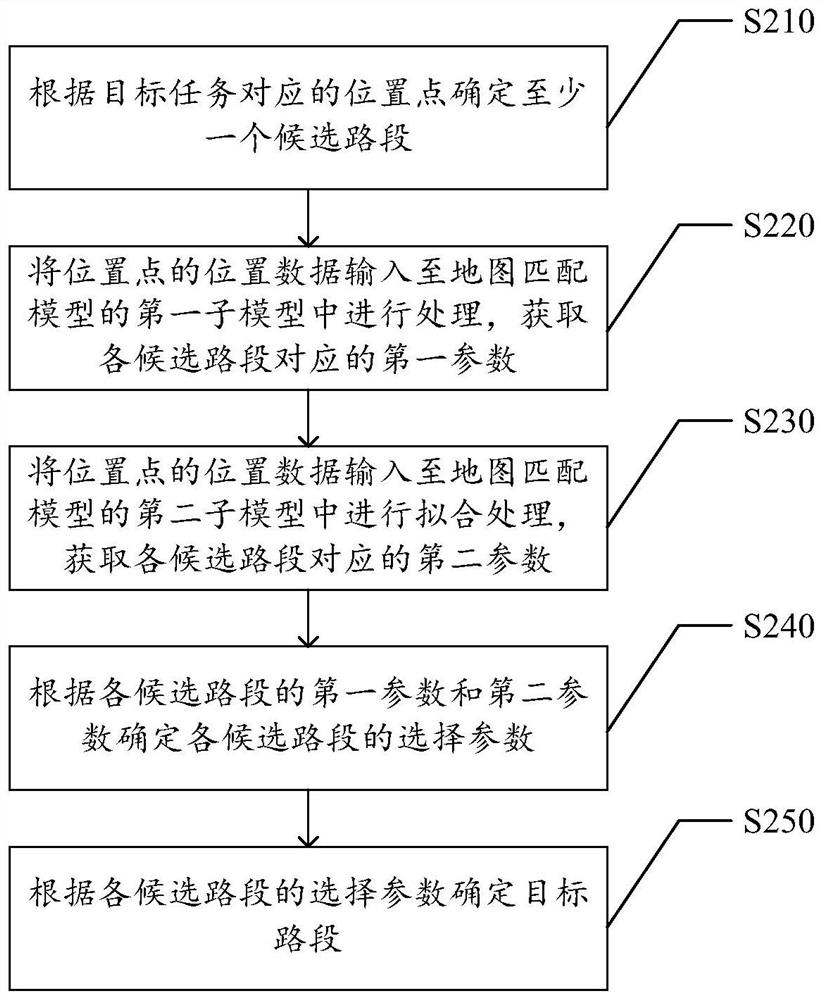
图2是本发明实施例的地图匹配方法的流程图。如图2所示,本发明实施例的地图匹配方法包括以下步骤:
步骤S210,根据目标任务对应的位置点确定至少一个候选路段。可选的,位置点为设备实时返回的GNSS点。
在一种可选的实现方式中,根据位置点的位置信息检索R-tree映射表,以确定对应的一个或多个候选路段。R-tree是一种空间索引数据结构,本实施例可以将路网中的路段首先建立R-tree映射表,根据位置点与路段区域的远近来捕获周围路段。应理解,本实施例并不对获取候选路段的方法进行限制。
步骤S220,将位置点的位置数据输入至地图匹配模型的第一子模型中进行处理,获取各候选路段对应的第一参数。其中,位置数据至少包括所述位置点与候选路段的关联信息。可选的,位置数据包括位置点与对应的候选路段的距离、该位置点的速度信息、候选路段的限速信息、该位置点与对应的候选路段的方向夹角信息等。在一种可选的实现方式中,第一子模型为HMM模型,第一参数为发射概率。其中,将位置点信息(例如位置点的经纬度等)、位置点与候选路段的距离、位置点的速度、候选路段的限速信息、位置点的运动方向与候选路段方向的夹角信息等输入至HMM模型中,确定对应的发射概率。
步骤S230,将位置点的位置数据输入至地图匹配模型的第二子模型中进行拟合处理,获取各候选路段对应的第二参数。在一种可选的实现方式中,第二子模型为XGBoost模型,第二参数为XGBoost模型输出的转移概率。其中,将位置点信息(例如位置点的经纬度等)、位置点与候选路段的距离、位置点的速度、候选路段的限速信息、位置点的运动方向与候选路段方向的夹角信息等输入至XGBoost模型中进行拟合处理,确定对应的转移概率。
步骤S240,根据各候选路段的第一参数和第二参数确定各候选路段的选择参数。在一种可选的实现方式中,通过计算候选路段的第一参数、第二参数和前一个位置点对应的目标路段的选择参数的乘积,确定该候选路段的选择参数。在其他可选的实现方式中,也可以通过计算第一参数和第二参数的乘积、或者加和、或者加权和、或者平均值等方式确定各候选路段的选择参数,本实施例并不对此进行限制。
步骤S250,根据各候选路段的选择参数确定目标路段。在一种可选的实现方式中,根据选择参数的大小对各候选路段进行排序,将选择参数最大的候选路段确定为目标路段。
在本实施例中,第二子模型的训练样本数据根据第一子模型的数据处理结果进行标注确定。在一种可选的实现方式中,第二子模型的训练样本数据包括正样本数据和负样本数据。可选的,第二子模型的训练样本数据通过以下步骤确定:对于一个样本,将该样本的位置数据输入至第一子模型,确定该样本对应的各候选路段的选择参数,将选择参数大于第一参数阈值的候选路段信息确定为正样本数据,将选择参数小于第二参数阈值的候选路段信息确定为负样本数据。可选的,正样本数据包括该候选路段对应的位置点的位置数据和转移概率等信息,负样本数据包括该候选路段应的位置点的位置数据和转移概率等信息。位置点的位置数据包括该位置点与对应的候选路段的距离、该位置点的速度信息、候选路段的限速信息、该位置点的运动方向与对应的候选路段的方向夹角信息等。本实施例中的第二子模型的训练方法与图1所示的实施例类似,在此不再赘述。
本实施例根据目标任务对应的位置点确定候选路段,将位置点的位置数据输入至地图匹配模型的第一子模型中进行处理,获取各候选路段对应的第一参数,将位置点的位置数据输入至地图匹配模型的第二子模型中进行拟合处理,获取各所述候选路段对应的第二参数,根据各候选路段的第一参数和第二参数确定各候选路段的选择参数,根据各候选路段的选择参数确定目标路段,其中,第二子模型的训练样本数据根据所述第一子模型的数据处理结果进行标注确定,由此,可以通过将位置数据中的多个特征进行融合,以提高地图匹配的准确性。
图3是本发明实施例的地图匹配方法的过程示意图。如图3所示,在接收到返回的位置点P后,根据位置点P的位置信息获得位置点P对应的候选路段31、候选路段32和候选路段33。在本实施例中,根据位置点P的位置信息分别确定其与候选路段31、候选路段32和候选路段33的距离,根据位置点P以及在其之前返回的位置点确定位置点P的运动方向和运动速度,并确定位置点P的运动方向分别和候选路段31-33的路段方向之间的夹角信息以及候选路段31-33的限速信息。其中,将位置点P的位置信息、运动速度和运动方向信息、位置点P与候选路段31-33之间的距离信息、位置点P的运动方向和候选路段31-33的路段方向之间的夹角信息以及候选路段31-33的限速信息等位置数据输入至地图匹配模型34中。
在本实施例中,地图匹配模型34包括第一子模型341、第二子模型342以及路段确定模块343。可选的,第一子模型341为HMM模型,第二子模型342为XGBoost模型。其中,第一子模型341对输入的位置数据进行处理,输出候选路段31-33对应的发射概率p1-p3。第二子模型342对输入的位置数据进行拟合处理,输出候选路段31-33对应的转移概率p1'-p3'。路段确定模块343计算候选路段31的发射概率p1和转移概率p1'的乘积(或加和、或加权和、或平均),获得候选路段31的选择参数s31,计算候选路段32的发射概率p2和转移概率p2'的乘积(或加和、或加权和、或平均),获得候选路段32的选择参数s32,计算候选路段33的发射概率p3和转移概率p3'的乘积(或加和、或加权和、或平均),获得候选路段33的选择参数s33,并对选择参数31-33进行比较,确定最大选择参数为选择参数s32。由此,地图匹配模型34输出位置点P对应的目标路段为候选路段32。
本实施例根据目标任务对应的位置点确定候选路段,将位置点的位置数据输入至地图匹配模型的第一子模型中进行处理,获取各候选路段对应的发射概率,将位置点的位置数据输入至地图匹配模型的第二子模型中进行拟合处理,获取各所述候选路段对应的转移概率,根据各候选路段的发射概率和转移概率确定各候选路段的选择参数,根据各候选路段的选择参数确定目标路段,其中,第二子模型的训练样本数据根据所述第一子模型的数据处理结果进行标注确定,由此,可以通过将位置数据中的多个特征进行融合,以提高地图匹配的准确性。
图4是本发明实施例的地图匹配模型的确定装置的示意图。如图4所示,本发明实施例的地图匹配模型的确定装置4包括第一处理单元41、样本数据确定单元42和训练单元43。
第一处理单元41被配置为将各样本的位置数据输入至所述地图匹配模型的第一子模型,确定各所述样本对应的各候选路段的选择参数,所述样本的位置数据至少包括所述样本的位置点与对应候选路段的关联信息。
样本数据确定单元42被配置为根据各所述选择参数对各所述样本的各候选路段进行标注以确定所述地图匹配模型的第二子模型的训练样本数据。
在一种可选的实现方式中,所述训练样本数据包括正样本数据和负样本数据。样本数据确定单元42包括正样本确定子单元421和负样本确定子单元422。正样本确定子单元421被配置为将选择参数大于第一参数阈值的候选路段信息标注为正样本数据。负样本确定子单元422被配置为将选择参数小于第二参数阈值的候选路段信息标注为负样本数据。
训练单元43被配置为根据所述训练样本数据训练所述第二子模型,以确定所述地图匹配模型。
本实施例通过地图匹配模型中的第一子模型确定各所述样本对应的各候选路段的选择参数,根据各选择参数对各样本的各候选路段进行标注以确定地图匹配模型的第二子模型的训练样本数据,根据训练样本数据训练第二子模型,以确定地图匹配模型。由此,本实施例的地图匹配模型可以通过确定多个特征对转移概率所带来的影响来确定转移概率,这使得多个特征是通过拟合确定对应的转移概率,而不是独立确定后进行乘积获得对应的转移概率,因此,可以有效利用多个特征,提高地图匹配的效率。
图5是本发明实施例的地图匹配装置的示意图。如图5所示,本发明实施例的地图匹配装置5包括候选路段确定单元51、第一参数获取单元52、第二参数获取单元53、选择参数确定单元54和目标路段确定单元55。
候选路段确定单元51被配置为根据目标任务对应的位置点确定至少一个候选路段。第一参数获取单元52被配置为将所述位置点的位置数据输入至地图匹配模型的第一子模型中进行处理,获取各所述候选路段对应的第一参数,所述位置数据至少包括所述位置点与候选路段的关联信息。可选的,所述位置数据包括位置点数据、所述位置点与各所述候选路段的距离、所述位置点的速度、各所述候选路段的限速信息、所述位置点的运动方向与各所述候选路段的方向的夹角信息中的一项或多项。
第二参数获取单元53被配置为将所述位置点的位置数据输入至地图匹配模型的第二子模型中进行拟合处理,获取各所述候选路段对应的第二参数。其中,所述第二子模型的训练样本数据根据所述第一子模型的数据处理结果进行标注确定。可选的,所述第一子模型为隐马尔可夫模型,所述第二子模型为XGBoost模型。
选择参数确定单元54被配置为根据各所述候选路段的第一参数和第二参数确定各所述候选路段的选择参数。可选的,选择参数确定单元54进一步被配置为计算所述候选路段的第一参数、所述第二参数和前一个位置点对应的目标路段的选择参数的乘积,确定所述候选路段的选择参数。目标路段确定单元55被配置为根据各所述候选路段的选择参数确定目标路段。
在一种可选的实现方式中,所述训练样本数据包括正样本数据和负样本数据。地图匹配装置5还包括训练单元56。训练单元56包括选择参数确定子单元561、正样本数据确定子单元562和负样本数据确定子单元563。选择参数确定子单元561被配置为对于一个样本,将所述样本的位置数据输入至所述第一子模型,确定所述样本对应的各候选路段的选择参数。正样本数据确定子单元562被配置为将选择参数大于第一参数阈值的候选路段信息确定为正样本数据。负样本数据确定子单元563被配置为将选择参数小于第二参数阈值的候选路段信息确定为负样本数据。
本实施例根据目标任务对应的位置点确定候选路段,将位置点的位置数据输入至地图匹配模型的第一子模型中进行处理,获取各候选路段对应的第一参数,将位置点的位置数据输入至地图匹配模型的第二子模型中进行拟合处理,获取各所述候选路段对应的第二参数,根据各候选路段的第一参数和第二参数确定各候选路段的选择参数,根据各候选路段的选择参数确定目标路段,其中,第二子模型的训练样本数据根据所述第一子模型的数据处理结果进行标注确定,由此,可以通过将位置数据中的多个特征进行融合,以提高地图匹配的准确性。
图6是本发明实施例的电子设备的示意图。如图6所示,电子设备6为通用数据处理装置,其包括通用的计算机硬件结构,其至少包括处理器61和存储器62。处理器61和存储器62通过总线63连接。存储器62适于存储处理器61可执行的指令或程序。处理器61可以是独立的微处理器,也可以是一个或者多个微处理器集合。由此,处理器61通过执行存储器62所存储的指令,从而执行如上所述的本发明实施例的方法流程实现对于数据的处理和对于其它装置的控制。总线63将上述多个组件连接在一起,同时将上述组件连接到显示控制器64和显示装置以及输入/输出(I/O)装置65。输入/输出(I/O)装置65可以是鼠标、键盘、调制解调器、网络接口、触控输入装置、体感输入装置、打印机以及本领域公知的其他装置。典型地,输入/输出装置65通过输入/输出(I/O)控制器66与系统相连。
本领域的技术人员应明白,本申请的实施例可提供为方法、装置(设备)或计算机程序产品。因此,本申请可采用完全硬件实施例、完全软件实施例或结合软件和硬件方面的实施例的形式。而且,本申请可采用在一个或多个其中包含有计算机可用程序代码的计算机可读存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品。
本申请是参照根据本申请实施例的方法、装置(设备)和计算机程序产品的流程图来描述的。应理解可由计算机程序指令实现流程图中的每一流程。
这些计算机程序指令可以存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现流程图一个流程或多个流程中指定的功能。
也可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程中指定的功能的装置。
本发明的另一实施例涉及一种非易失性存储介质,用于存储计算机可读程序,所述计算机可读程序用于供计算机执行上述部分或全部的方法实施例。
即,本领域技术人员可以理解,实现上述实施例方法中的全部或部分步骤是可以通过程序来指定相关的硬件来完成,该程序存储在一个存储介质中,包括若干指令用以使得一个设备(可以是单片机,芯片等)或处理器(processor)执行本申请各实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(ROM,Read-OnlyMemory)、随机存取存储器(RAM,Random Access Memory)、磁碟或者光盘等各种可以存储程序代码的介质。
本发明实施例公开了TS1、一种地图匹配方法,所述方法包括:
根据目标任务对应的位置点确定至少一个候选路段;
将所述位置点的位置数据输入至地图匹配模型的第一子模型中进行处理,获取各所述候选路段对应的第一参数,所述位置数据至少包括所述位置点与候选路段的关联信息;
将所述位置点的位置数据输入至地图匹配模型的第二子模型中进行拟合处理,获取各所述候选路段对应的第二参数;
根据各所述候选路段的第一参数和第二参数确定各所述候选路段的选择参数;
根据各所述候选路段的选择参数确定目标路段;
其中,所述第二子模型的训练样本数据根据所述第一子模型的数据处理结果进行标注确定。
TS2、根据TS1所述的方法,所述位置数据包括位置点数据、所述位置点与各所述候选路段的距离、所述位置点的速度、各所述候选路段的限速信息、所述位置点的运动方向与各所述候选路段的方向的夹角信息中的一项或多项。
TS3、根据TS1所述的方法,所述第一子模型为隐马尔可夫模型,所述第二子模型为XGBoost模型。
TS4、根据TS1-TS3中任一项所述的方法,所述训练样本数据包括正样本数据和负样本数据;
所述第二子模型的训练样本数据通过以下步骤确定:
对于一个样本,将所述样本的位置数据输入至所述第一子模型,确定所述样本对应的各候选路段的选择参数;
将选择参数大于第一参数阈值的候选路段信息确定为正样本数据;
将选择参数小于第二参数阈值的候选路段信息确定为负样本数据。
TS5、根据TS1所述的方法,根据各所述候选路段的第一参数和第二参数确定各所述候选路段的选择参数包括:
计算所述候选路段的第一参数、所述第二参数和前一个位置点对应的目标路段的选择参数的乘积,确定所述候选路段的选择参数。
本发明实施例公开了TS6、一种地图匹配模型的确定方法,所述方法包括:
将各样本的位置数据输入至所述地图匹配模型的第一子模型,确定各所述样本对应的各候选路段的选择参数,所述样本的位置数据至少包括所述样本的位置点与对应候选路段的关联信息;
根据各所述选择参数对各所述样本的各候选路段进行标注以确定所述地图匹配模型的第二子模型的训练样本数据;
根据所述训练样本数据训练所述第二子模型,以确定所述地图匹配模型。
TS7、根据TS6所述的方法,所述训练样本数据包括正样本数据和负样本数据;
根据各所述选择参数对各所述样本的各候选路段进行标注以确定所述地图匹配模型的第二子模型的训练样本数据包括:
将选择参数大于第一参数阈值的候选路段信息标注为正样本数据;
将选择参数小于第二参数阈值的候选路段信息标注为负样本数据。
TS8、根据TS6或TS7所述的方法,所述第一子模型为隐马尔可夫模型,所述第二子模型为XGBoost模型。
本发明实施例公开了TS9、一种地图匹配装置,所述装置包括:
候选路段确定单元,被配置为根据目标任务对应的位置点确定至少一个候选路段;
第一参数获取单元,被配置为将所述位置点的位置数据输入至地图匹配模型的第一子模型中进行处理,获取各所述候选路段对应的第一参数,所述位置数据至少包括所述位置点与候选路段的关联信息;
第二参数获取单元,被配置为将所述位置点的位置数据输入至地图匹配模型的第二子模型中进行拟合处理,获取各所述候选路段对应的第二参数;
选择参数确定单元,被配置为根据各所述候选路段的第一参数和第二参数确定各所述候选路段的选择参数;
目标路段确定单元,被配置为根据各所述候选路段的选择参数确定目标路段;
其中,所述第二子模型的训练样本数据根据所述第一子模型的数据处理结果进行标注确定。
TS10、根据TS9所述的装置,所述位置数据包括位置点数据、所述位置点与各所述候选路段的距离、所述位置点的速度、各所述候选路段的限速信息、所述位置点的运动方向与各所述候选路段的方向的夹角信息中的一项或多项。
TS11、根据TS9所述的装置,所述第一子模型为隐马尔可夫模型,所述第二子模型为XGBoost模型。
TS12、根据TS9-TS11中任一项所述的装置,所述训练样本数据包括正样本数据和负样本数据;
所述装置包括训练单元,所述训练单元包括:
选择参数确定子单元,被配置为对于一个样本,将所述样本的位置数据输入至所述第一子模型,确定所述样本对应的各候选路段的选择参数;
正样本数据确定子单元,被配置为将选择参数大于第一参数阈值的候选路段信息确定为正样本数据;
负样本数据确定子单元,被配置为将选择参数小于第二参数阈值的候选路段信息确定为负样本数据。
TS13、根据TS9所述的装置,所述选择参数确定单元进一步被配置为计算所述候选路段的第一参数、所述第二参数和前一个位置点对应的目标路段的选择参数的乘积,确定所述候选路段的选择参数。
本发明实施例公开TS14、一种地图匹配模型的确定装置,所述装置包括:
第一处理单元,被配置为将各样本的位置数据输入至所述地图匹配模型的第一子模型,确定各所述样本对应的各候选路段的选择参数,所述样本的位置数据至少包括所述样本的位置点与对应候选路段的关联信息;
样本数据确定单元,被配置为根据各所述选择参数对各所述样本的各候选路段进行标注以确定所述地图匹配模型的第二子模型的训练样本数据;
训练单元,被配置为根据所述训练样本数据训练所述第二子模型,以确定所述地图匹配模型。
TS15、根据TS14所述的装置,所述训练样本数据包括正样本数据和负样本数据;
所述样本数据确定单元包括:
正样本确定子单元,被配置为将选择参数大于第一参数阈值的候选路段信息标注为正样本数据;
负样本确定子单元,被配置为将选择参数小于第二参数阈值的候选路段信息标注为负样本数据。
TS16、根据TS14或TS15所述的装置,所述第一子模型为隐马尔可夫模型,所述第二子模型为XGBoost模型。
本发明实施例公开了TS17、一种电子设备,所述电子设备包括存储器和处理器,其中,所述存储器用于存储一条或多条计算机程序指令,其中,所述一条或多条计算机程序指令被所述处理器执行以实现如TS1-TS8中任一项所述的方法。
本发明实施例公开了TS18、一种计算机可读存储介质,其上存储计算机程序指令,所述计算机程序指令在被处理器执行时以实现如TS1-TS8中任一项所述的方法。
本发明实施例公开了TS19、一种计算机程序产品,当所述计算机程序产品在计算机上运行时,使得所述计算机执行如TS1-TS8中任一项所述的方法。
以上所述仅为本发明的优选实施例,并不用于限制本发明,对于本领域技术人员而言,本发明可以有各种改动和变化。凡在本发明的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 地图匹配方法、地图匹配模型的确定方法及装置
- 地图匹配方法、地图匹配模型的确定方法及装置