精确选择测距周期的脉冲式激光雷达跨周期测距方法
文献发布时间:2023-06-19 12:05:39
技术领域
本发明属于激光雷达测距领域,具体涉及一种精确选择测距周期的脉冲式激光雷达跨周期测距方法。
背景技术
当前激光雷达的跨周期测量主要采用调制激光脉冲发射时间来实现,通过调制激光脉冲发射时间,使连续两个发射信号的时间差不等。基于地形连续变化的假设,在短时间内,获取的一组回波测距值近似相等,因此属于正确周期的一组回波的测距值不受发射脉冲时间调制的影响,而属于错误周期的一组测距值则受发射脉冲时间调制的影响,呈现出波动的特点。通过计算各周期下的测距值,分析测距值波动特点来确定该组回波所属的正确周期。
当前测距值序列波动分析主要有序列能量法、自相关分析法、互相关分析法和频率域分析法。能量法通过计算测距值序列的方差,选取方差最小的周期作为正确周期;自相关分析法通过分析测距值序列的自相关性,选取自相关性最强的周期作为正确周期;互相关分析法通过分析测距值序列和调制信号的互相关性,选取互相关性最小的周期作为正确周期;频率分析法通过分析测距值序列的频率,选取高频信号最少的周期作为正确周期。
发明内容
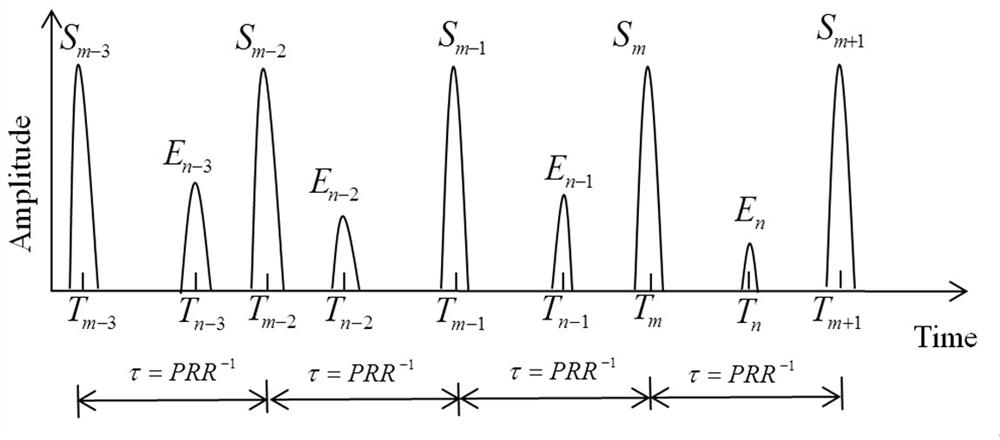
脉冲式激光雷达通过测量回波信号和对应发射信号的时间差Δt进行距离测量。设距离为R,则
脉冲式激光雷达的测距序列分析方法具有两个假设条件:第一个假设为一组回波序列均来自表面连续变化目标的反射,如平坦的地形、无植被覆盖的山坡等,而激光扫描仪的实际作业场景中有大量地形表面突变的场景,如有大量建筑物的居民区及植被覆盖区等;地形的突变会在一定程度上引入噪声,如附图2所示,使其抵消掉信号调制的作用,当测距值序列中测距波动大于脉冲信号时间调制对应的最大测距时,将无法准确确定正确的周期;第二个假设是一组回波序列均属于同一周期,对于一组包含相邻两个周期的回波序列,如附图3所示,无论将该序列归于哪个周期,都存在回波序列中有一部分回波的测距周期被错误确定的情况,测距序列分析方法将失效。
本发明的目的是解决上述问题,提供一种精确选择测距周期的脉冲式激光雷达跨周期测距方法,计算得到一组回波序列在不同周期时的测距值序列,对测距值序列构建差分序列,得到测距差值序列,剔除其中与均值偏差大的异常值即去噪,比较并选出去噪后噪声能量最小时对应的周期作为该回波序列的测距周期,计算选出的测距周期的置信度,根据置信度与阈值的关系判断选出的测距周期是否可靠,最后根据选出的可靠的测距周期计算该回波序列的距离值。
本发明的技术方案是精确选择测距周期的脉冲式激光雷达跨周期测距方法,包括以下步骤:
步骤1:调制激光脉冲发射时间,利用激光雷达发射信号,得到一组对应不同测距周期的测距值序列的回波信号;
步骤2:计算相邻点的测距差,构建差分序列,得到测距差值序列;
步骤3:计算测距差值序列的均值、标准差,剔除与均值偏差大的异常值;
步骤4:计算剔除异常值后的测距差值序列的噪声能量,选出噪声能量最小的信号周期作为测距周期;
步骤5:计算选出的测距周期的置信度,若计算得到的置信度大于阈值,则步骤4选出的测距周期可靠;否则,丢弃该组回波信号,进行下一组回波信号的测距周期计算。
进一步地,步骤3中,所述剔除与均值偏差大的异常值,包括以下过程:
1)计算第z个周期下测距差值序列的均值m
测距值序列R
均值
2)计算测距差值序列的测距差值d
优选地,步骤4中,所述计算剔除异常值的测距差值序列的噪声能量,噪声能量D的计算式如下
式中
优选地,步骤5中,所述计算选出的测距周期的置信度,测距周期的置信度E
D
式中D
作为可替换的方案,步骤5中的置信度也可采用噪声能量差值计算,
相比现有技术,本发明的有益效果包括:
1)本发明方法针对激光雷达扫描测距时地形突变等导致脉冲时间调制功能失效的问题,采用去噪算法提高了跨周期测距中测距周期选择的准确性和稳定性;
2)本发明方法计算选出的测距差值序列的置信度,将置信度低于阈值的一组回波序列舍弃,避免激光雷达回波序列中周期切换导致的测距周期不确定性的问题,确保测距结果的准确性。
附图说明
下面结合附图和实施例对本发明作进一步说明。
图1为脉冲式激光雷达发射脉冲和接收脉冲的时序图。
图2为地形非连续变化场景的示意图。
图3为处于周期切换区的地形的示意图。
图4为本发明实施例按不同周期解算后的点云形态图。
具体实施方式
实施例以序列能量法为基础,精确选择测距周期的脉冲式激光雷达跨周期测距方法,包括以下步骤:
步骤1:调制激光脉冲发射时间,利用激光雷达发射信号、回波信号构建一组回波信号的测距序列。以4个周期为例,设属于周期z的测距值序列为R
步骤2:计算相邻点的测距差,构建差分序列,得到测距差值序列ΔR
步骤3:计算测距差值序列的均值、标准差,剔除与均值偏差大的异常值;
ΔR
步骤4:计算剔除异常值后的测距差值序列的噪声能量,选出噪声能量最小的信号周期作为测距周期;
噪声能量D的计算式如下
式中
表1所示为剔除异常值即剔除噪声前后各周期对应的噪声能量,由表1可见,剔除噪声后第2周期噪声能量最小,选出2周期作为测距周期;
步骤5:试验确定阈值δ,计算选出的测距周期的置信度E
测距周期的置信度E
D
式中D
表1噪声剔除前后不同周期的序列能量对比表
如图4所示,经噪点剔除和置信度判别后,分别按表1所示的各个周期解算得到的点云,可以看出,本发明方法选择第2周期为正确测距周期与实际相符,地形走势正常,验证了本发明方法可靠。而非正确周期的点云由于解算的测距错误,地形走势异常,呈圆弧状。
本发明的步骤3的剔除异常值即去噪,也可采用频域滤波方法,参照2012年第4期《仪表技术与传感器》刊登的方新磊等的论文“基于频域滤波的加速度信号处理”公开的频域滤波方法。
- 精确选择测距周期的脉冲式激光雷达跨周期测距方法
- 激光测距计时时间的读取方法、装置及脉冲式激光雷达