一种自动扶梯附加制动器自适应缓冲装置
文献发布时间:2023-06-19 12:05:39
技术领域
本发明属于技术自动扶梯附加制动器技术领域,尤其涉及一种自动扶梯附加制动器自适应缓冲装置。
背景技术
棘轮和棘爪装置是公交型或重载型自动扶梯常用的附加制动器结构形式,棘轮安装在自动扶梯的主驱动轴上,棘爪和电磁开关则安装于临近棘轮的架体上。当扶梯在运行过程当中出现紧急停梯断电的情况时,电磁开关驱使棘爪转动卡住棘轮使其与主驱动轴发生相对转动,在内部摩擦片的摩擦阻力作用下缓慢“刹住”主驱动。
但是,目前正被广泛应用的附加制动器,其棘轮与棘爪均为优质碳素结构钢或合金钢材质,在棘爪卡住棘轮的时候会有瞬时冲击力产生,乘客在紧急停梯瞬间有突然急停的不适感。经测速检验,常规的附加制动器在开始制停的瞬间加速度可能出现大于1m/s
另外,当出现制停加速度超标时,维保工人通常需要拆开扶梯的检修盖板,进入机房内对棘轮和棘爪组件上的预紧螺栓进行调节,时间长,工序复杂,而且不能一次调节到位。
综上所述,亟需在附加制动器上增加一种具有缓冲效果并且便于维护调整的装置。
发明内容
本发明的目的在于,提供一种自动扶梯附加制动器自适应缓冲装置,解决附加制动器动作时棘轮撞击棘爪瞬间的冲击力过大,导致瞬时加速度超过国家标准要求的1m/s2的问题。
本发明是通过以下技术方案实现的:
一种自动扶梯附加制动器自适应缓冲装置,包括安装于主驱动轴的棘轮和铰接于架体的棘爪,所述棘爪由电磁开关驱动旋转以锁止棘轮或解锁;所述棘爪由爪尖段、爪根段、缓冲组件和自动调节组件构成,所述爪尖段与爪根段通过自动调节组件连接,所述缓冲组件垫设于爪尖段与爪根段之间,所述自动调节组件可测量爪尖段通过缓冲组件施加于爪根段的压力数据并改变爪尖段与爪根段之间的距离从而调节缓冲组件的缓冲效果。
通过上述方案,本发明至少得到以下技术效果:
本发明将附加制动器的棘爪改进为爪尖段与爪根段的组合结构,两段结构之间通过自动调节组件连接,在两段结构之间增加了缓冲组件来缓冲棘爪与棘轮初接触产生制动效果时的冲击力,使棘轮可在缓冲组件提供的缓冲范围内释放部分冲击力,并通过自动调节组件根据测量到的压力值调节爪尖段与爪根段之间的距离,调节缓冲组件能够提供的缓冲力大小,从而使棘轮的加速度降低至1m/s
优选的,所述自动调节组件由压力传感器、电动螺杆、螺母、定位套筒和单片机构成;所述定位套筒固定于爪尖段侧壁,所述电动螺杆固定于爪根段侧壁,所述螺母嵌设于定位套筒内,所述电动螺杆与螺母螺纹配合,所述压力传感器垫设于缓冲组件与爪根段之间用于检测自爪尖段经缓冲组件缓冲后施加于爪根段的压力值,所述单片机分别与压力传感器和电动螺杆通信连接,使电动螺杆转动改变爪尖段与爪根段之间的距离。
优选的,所述套筒的内直径大于电动螺杆的直径并小于螺母的外径。
优选的,所述套筒原理爪根段的一端开设有嵌槽,所述嵌槽与套筒内腔连通用于嵌入螺母,所述嵌槽的最小宽度与螺母的外径匹配,使螺母可在不转动的状态下沿嵌槽平移滑动。
优选的,所述缓冲组件由碟簧和限位杆构成;所述限位杆一端固定于爪尖段底部,其另一端朝向爪根段设置,所述碟簧套设于限位杆。
优选的,所述压力传感器呈环状套设于限位杆,其一侧表面抵于爪根段表面,另一侧表面与碟簧相抵。
优选的,所述爪根段表面开设有限位槽,所述限位槽内设置有橡胶垫块,所述橡胶垫块用于与限位杆相抵接触。
优选的,所述碟簧可替换为弹簧或橡胶套管。
优选的,所述自动调节组件为两个,对称设置于爪根段和爪尖段的两侧。
本发明的有益效果为:
本发明自动扶梯附加制动器自适应缓冲装置,在棘爪的爪尖段和爪根段之间增设缓冲组件,当附加制动器动作时,棘爪卡住棘轮的瞬间通过缓冲组件可有效减小棘轮的冲击力,从而起到平稳制停主驱动的作用。棘爪还通过自动调节组件监测制停过程中缓冲组件所传递的压力值,并根据压力值调节棘爪两段之间的距离。每次棘爪与棘轮撞击过后,均进行一次缓冲弹性调整,使整套附加制动器的制动加速度控制在合理的范围内。
附图说明
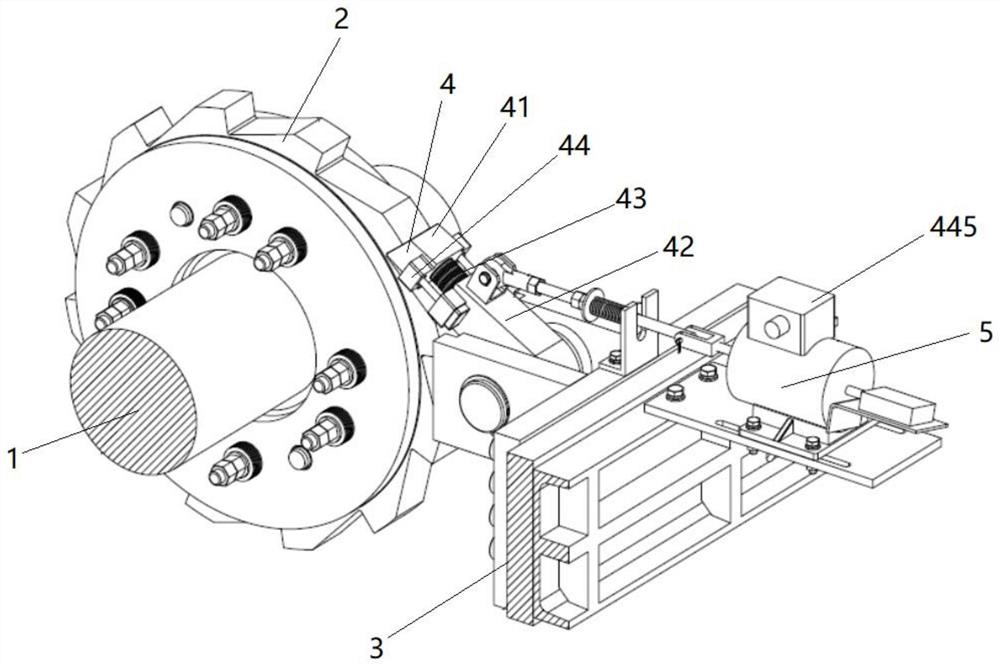
图1为本发明在一实施例中提供的缓冲装置制动状态轴侧示意图。
图2为本发明在一实施例中提供的缓冲装置制动状态主视图。
图3为本发明在一实施例中提供的棘爪整体轴侧示意图。
图4为本发明在一实施例中提供的棘爪的定位套筒半剖示意图。
图5为本发明在一实施例中提供的棘爪的结构爆炸图。
图例:
1主驱动轴;2棘轮;3架体;4棘爪;5电磁开关;
41爪尖段;42爪根段;43缓冲组件;44自动调节组件;
421限位槽;
431碟簧;432限位杆;433橡胶垫块;
441压力传感器;442电动螺杆;443螺母;444定位套筒;445单片机;446嵌槽。
具体实施方式
下面结合附图和实施例对本发明作进一步说明。
实施例1:
如图1-图5所示,本实施例提供了一种自动扶梯附加制动器自适应缓冲装置,包括安装于主驱动轴1的棘轮2和铰接于架体3的棘爪4,棘爪4由电磁开关5驱动旋转以锁止棘轮2或解锁。棘爪4由爪尖段41、爪根段42、缓冲组件43和自动调节组件44构成。爪尖段41与爪根段42之间通过自动调节组件44连接,缓冲组件43则垫设于爪尖段41与爪根段42之间的空隙中。当棘爪4在电磁开关5驱动下卡入棘轮2的齿槽时,棘轮2与棘爪4碰撞产生的撞击受到缓冲组件43的弹性作用力削弱,从而降低棘轮2与棘爪4碰撞时产生的加速度,使其符合1m/s
缓冲组件43由限位杆432和碟簧431构成。限位杆432一端固定于爪尖段41底部,其另一端朝向爪根段42设置,碟簧431套设于限位杆432。爪尖段41卡入棘轮2齿槽时会受到冲击力作用压向爪根段42,迫使二者之间的碟簧431压缩,碟簧431产生反向的弹性力削弱冲击力起到缓冲效果。限位杆432则用于保障爪尖段41与爪根段42的最小安全距离,避免二者距离过近造成造成碟簧431侧向脱出而损坏的情况。本实施例中,碟簧431可替换为弹簧或橡胶套等具备弹性缓冲作用的空心柱状结构。
自动调节组件44由压力传感器441、电动螺杆442、螺母443、定位套筒444和单片机445构成;定位套筒444固定于爪尖段41侧壁,螺母443嵌设于定位套筒444内。电动螺杆442的电机部分固定于爪根段42侧壁,电动螺杆442的螺杆部分插入定位套筒444中并与螺母443螺纹配合。单片机445分别与压力传感器441和电动螺杆442通信连接。压力传感器441垫设于缓冲组件43与爪根段42之间用于检测自爪尖段41经缓冲组件43缓冲后施加于爪根段42的压力值,压力传感器441将压力值信息传送至单片机445与预存的压力值信息进行比对,当压力传感器441监测到的压力值超出预值范围时,单片机445指令电动螺杆442的电机正向或反向旋转,使螺杆部分沿其自身轴线旋转,实现螺母443与螺杆的相对运动,从而改变爪尖段41与爪根段42之间的距离,从而改变碟簧431的初始压缩量,调节碟簧431能够提供缓冲力的大小,使下一次制动过程中产生的加速度更接近或符合抵于1m/s
套筒444为中空管状形成有沿其轴向贯通的通孔,该通孔的直径大于电动螺杆442的外直径,使电动螺杆442的螺杆部分能够顺利插入套筒444中。套筒444远离电动螺杆442的一端开设有嵌槽446,嵌槽446与套筒的内腔连通,用于滑动嵌入螺母443。螺母443的便于与嵌槽446最窄边缘相抵接触,使螺母443无法在嵌槽446内周向转动,当电动螺杆442转动时,螺母443无法随电动螺杆442转动因此产生沿电动螺杆442轴向的相对位移,可对爪尖段41与爪根段42之间的距离进行调节。并且由于螺母443可沿嵌槽446平移滑动,使得爪尖段41受压靠向爪根段42时,螺母443在嵌槽446内滑动可实现伸缩效果。而螺母443的外径大于套筒444内腔通孔的直径可起到限位功能,避免在爪尖段41在弹力作用下与电动螺杆442脱离。
为避免限位杆432与爪根段42直接碰撞造成额外的振动,同时也为了提升缓冲效果吸收棘轮2与棘爪4碰撞产生的冲击力。本实施例在爪根段42开设有限位槽421,并在限位槽421内设置橡胶垫块433。在爪尖段41靠向爪根段42时,限位杆432底端顶压于橡胶垫块433产生二次缓冲的效果,同时起到保护限位杆432避免其断折的效果。
以上实施方式中的各种技术特征可以任意进行组合,只要特征之间的组合不存在冲突或矛盾即可,但是限于篇幅,未进行一一描述。
本发明并不局限于上述实施方式,如果对本发明的各种改动或变型不脱离本发明的精神和范围,倘若这些改动和变型属于本发明的权利要求和等同技术范围之内,则本发明也意图包含这些改动和变动。
- 一种自动扶梯附加制动器自适应缓冲装置
- 一种自动扶梯主驱动附加制动器预磨装置