电动作业机
文献发布时间:2023-06-19 12:07:15
关联申请的相互参考
本国际申请主张基于2018年12月26日向日本专利局申请的日本专利申请第2018-242998的优先权,通过参考,将日本专利申请第2018-242998号的全部内容援用到本国际申请中。
技术领域
本发明涉及具备马达的电动作业机中的搭载用于检测马达的旋转位置的旋转传感器的技术。
背景技术
下述的专利文献1公开了一种具备马达的电动工具。该电动工具中,在马达的端部安装有传感器基板。该传感器基板安装有:对马达的旋转位置进行检测的霍尔传感器。
现有技术文献
专利文献
专利文献1:日本特开2018-047530号公报
发明内容
专利文献1中公开的电动工具中,霍尔传感器设置于与马达分体的传感器基板。像这样的电动工具中,为了将霍尔传感器配置于靠近转子的位置,有可能产生使转子变长的需要。使转子变长会导致转子大型化。此外,像这样的电动工具中,霍尔传感器与转子之间的距离的公差中包括传感器基板的厚度公差。霍尔传感器与转子之间的距离的公差中包括传感器基板的厚度公差有可能导致旋转位置的检测精度降低。
本发明的1个方面优选为:可以提供能够抑制马达大型化、且能够采用旋转传感器来精度良好地检测马达的旋转位置的电动作业机。
本发明的1个方面中的电动作业机具备:马达、驱动部以及旋转传感器。驱动部构成为供被驱动部件装配。马达的旋转力传递给驱动部。驱动部通过马达的旋转力对装配于驱动部的被驱动部件进行驱动。被驱动部件通过被驱动部驱动而对作业对象进行作用。旋转传感器输出与马达的旋转位置相对应的信号。
马达具备:定子和永久磁铁型的转子。定子具备:圆筒体(环状部件)、多个齿以及多个线圈。圆筒体具备第一内周面及第一外周面。多个齿竖立设置于第一内周面或第一外周面。多个线圈通过接受电力而产生磁力。多个线圈分别卷绕于多个齿中的对应的1个齿。
旋转传感器设置于定子。旋转传感器设置在以下区域:在定子的径向上比多个线圈所存在的区域更靠近转子的区域。
像这样构成的电动作业机中,旋转传感器设置于马达中包含的定子。并且,旋转传感器在定子中设置于比多个线圈所存在的区域更靠近转子的区域。因此,能够将旋转传感器配置成接近转子而不会使转子大型化。据此,能够采用旋转传感器精度良好地检测马达的旋转位置。
被驱动部件可以构成为:能够相对于驱动部进行装卸。作业对象可以为任意部件。作业对象可以为例如各种被加工材料、各种固定件、植物、粉尘、气体、液体、其他各种各样的对象。各种被加工材料可以包括例如木材、金属、塑料等。各种固定件可以包括例如螺丝、钉子、螺母等。被驱动部件可以以任意方式对作业对象进行作用。被驱动部件可以对例如被加工材料进行作用。更具体而言,被驱动部件例如可以按在被加工材料上开孔的方式进行作用,也可以按对被加工材料进行切断或研磨的方式进行作用。被驱动部件可以对例如固定件进行作用。更具体而言,被驱动部件例如可以构成为:按使螺丝旋转的方式进行作用,以使螺丝旋入被固定部件。另外,例如被驱动部件也可以对电动作业机周围的空气进行作用。更具体而言,被驱动部件例如可以按对电动作业机周围的空气提供能量以使其产生气流的方式进行作用。例如,可以按从电动作业机释放空气的方式产生该气流。也可以按空气向电动作业机流入的方式产生该气流。另外,例如被驱动部件可以构成为:对液体进行作用,从而将液体释放或吸入。另外,例如被驱动部件可以对植物进行作用。更具体而言,例如被驱动部件可以构成为:对草、小径树木等植物进行收割。
定子可以具备定子芯和绝缘子。定子芯与圆筒体的第一部分对应,并且,与多个齿各自的第一部分对应。定子芯可以包含磁性体。绝缘子与圆筒体的第二部分对应,并且,与多个齿各自的第二部分对应。绝缘子可以在沿着转子的旋转轴的方向上与定子芯邻接配置。绝缘子可以包含树脂。旋转传感器可以设置于绝缘子。
像这样构成的电动作业机中,旋转传感器设置于马达中的绝缘子。因此,能够简化将旋转传感器设置于马达的作业。
绝缘子可以仅包含树脂。绝缘子也可以包含树脂及与树脂不同的绝缘性材料。绝缘子还可以仅包含与树脂不同的绝缘性材料。绝缘子可以利用任意方法制作。绝缘子可以利用例如注射成型法等成型方法一体地成型。
定子芯可以具备芯筒体和多个芯齿。芯筒体与圆筒体的第一部分对应。多个芯齿分别与多个齿各自的第一部分对应。绝缘子具备绝缘子筒体和多个绝缘子齿。绝缘子筒体与圆筒体的第二部分对应。多个绝缘子齿分别与多个齿各自的第二部分对应。旋转传感器可以设置于多个绝缘子齿中的1个。
像这样构成的电动作业机中,旋转传感器设置于多个绝缘子齿中的1个。因此,能够将旋转传感器容易地配置于比线圈更靠转子侧的位置。
绝缘子筒体可以具备第二内周面及第二外周面。第二内周面与第一内周面的一部分对应。第二外周面与第一外周面的一部分对应。多个绝缘子齿可以分别具备:齿主体和凸缘状的前端部件。齿主体竖立设置于第二内周面或第二外周面。齿主体卷绕有多个线圈中的对应的1个线圈。齿主体包括朝向转子的旋转轴突出的端部。齿主体具备筒状的形状。前端部件设置于齿主体中的所述端部。旋转传感器可以设置于前端部件。
像这样构成的电动作业机中,能够将旋转传感器可靠地配置于比线圈更靠转子侧的位置。
多个绝缘子齿可以具备:设置有旋转传感器的第一绝缘子齿。第一绝缘子齿为多个绝缘子齿中的1个。第一绝缘子齿可以具备:设置于前端部件的板状的台座部。旋转传感器可以设置于台座部。
像这样构成的电动作业机中,旋转传感器设置于台座部。因此,能够将旋转传感器稳定地配置于比线圈更靠近转子的位置。
台座部可以具备板面。该板面可以在沿着转子的旋转轴的方向上配置于转子的外侧。该板面可以与转子的端面对置。
像这样构成的电动作业机中,台座部在沿着转子的旋转轴的方向上配置于转子的外侧。因此,能够将旋转传感器容易地设置于台座部。此外,能够将旋转传感器设置成与转子的端面对置。据此,能够利用旋转传感器适当地检测伴随于转子的旋转而产生的磁场变化。
与台座部的板面平行的面可以与转子的旋转轴交叉。该板面可以与转子的旋转轴垂直。像这样构成的电动作业机中,能够抑制有可能伴随于台座部及旋转传感器的设置而产生的马达大型化,并且,能够适当地检测转子的旋转位置。
多个绝缘子齿可以分别具备台座部。这种情况下,电动作业机可以进一步具备1个以上的追加的旋转传感器。旋转传感器及1个以上的追加的旋转传感器可以分别设置于多个绝缘子齿中的对应的1个绝缘子齿的台座部。
像这样构成的电动作业机中,能够将旋转传感器及1个以上的追加的旋转传感器分别有效且适当地设置于马达。
马达可以为内转子型。
附图说明
图1是实施方式的电动作业机的立体图。
图2是表示实施方式的电动作业机的内部构成的侧视图。
图3是表示实施方式的电动作业机的电气构成的框图。
图4是实施方式的马达的立体图。
图5是实施方式的马达的主视图。
图6是去除了线圈的状态下的定子的立体图。
图7是去除了线圈的状态下的定子的分解立体图。
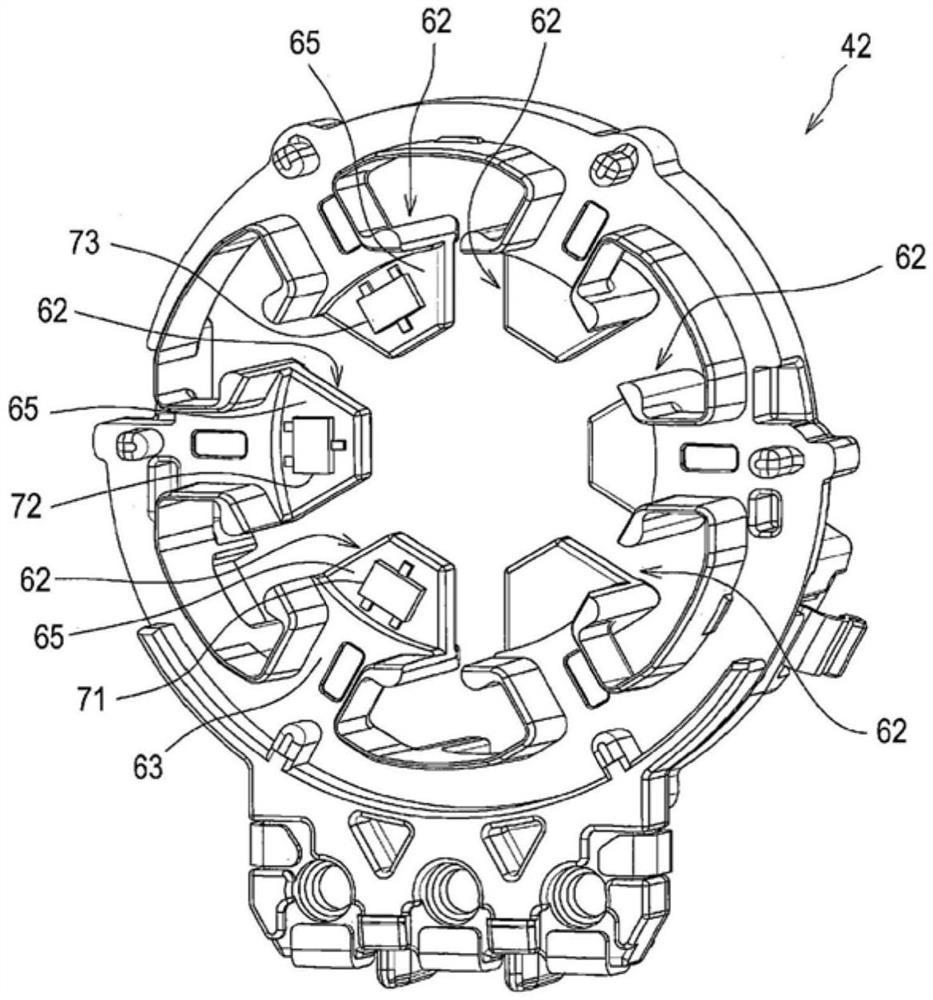
图8是第一绝缘子的立体图。
图9是局部地表示马达中的第一绝缘子及转子的后视图。
图10是图5中的X-X截面图。
图11是表示第一绝缘子中的包括树脂配线部的一部分的后视图。
图12是表示第一绝缘子中的包括树脂配线部的一部分的立体图。
图13是设置树脂配线部之前的第一绝缘子的局部后视图。
图14是图12中的XIV-XIV截面图。
图15是表示旋转传感器的另一配置例的立体图。
符号说明
1…电动作业机,8…卡盘套筒,12…马达,13…驱动机构,15…控制器,20…定子,21…定子支撑环,22…定子齿,23…定子齿主体,24…定子齿前端部件,31…第一线圈,32…第二线圈,3…第三线圈,34…第四线圈,35…第五线圈,36…第六线圈,41…定子芯,42、120…第一绝缘子,51…支撑芯,52…芯齿,53…芯齿主体,54…芯齿前端部件,61…第一支撑环,62、122…第一齿,63、123…第一齿主体,64、124…第一齿前端部件,65…台座部,71、72、73…旋转传感器,90…转子,96~99…磁铁。
具体实施方式
以下,参照附图,对本发明的例示性的实施方式进行说明。
[1.实施方式]
(1-1)电动作业机的构成
图1所示的电动作业机1构成为例如充电式冲击起子。充电式冲击起子通过由后述的蓄电池组100供给的电力而进行工作。充电式冲击起子用于例如使螺丝、螺栓等紧固部件旋转而旋入作业对象。充电式冲击起子根据在使紧固部件旋转时从紧固部件接受的负载而产生旋转方向上的打击。充电式冲击起子能够通过该打击而在旋转方向上产生较大的扭矩。
如图1所示,本实施方式的电动作业机1具备:主体2以及蓄电池组100。蓄电池组100以能够拆卸的方式安装于主体2。
主体2具备外壳3。外壳3具备左右分割的2个半开外壳3a、3b。外壳3是上述半开外壳3a、3b组合而构成的。外壳3可以为例如包含树脂的注射成型部件。
主体2具备:第一收纳部5、把手6、以及第二收纳部7。第一收纳部5设置有卡盘套筒8、LED10及旋转方向切换操作部11。LED10向电动作业机1的外部照射光。把手6自第一收纳部5延伸设置。第二收纳部7自把手6延伸设置。第二收纳部7设置有蓄电池装配部7a。蓄电池装配部7a以能够拆卸的方式安装有蓄电池组100。蓄电池组100具备后述的蓄电池101(参照图3)。
把手6由电动作业机1的使用者进行把持。把手6设置有触发操作部9。使用者能够在把持把手6的状态下对触发操作部9进行拉动操作。
参照图2,对主体2的内部(即,外壳3的内部)的构成进行说明。图2示出拆掉了半开外壳3a的电动作业机1。
如图2所示,第一收纳部5设置有:马达12、驱动机构13、风扇14、前述的卡盘套筒8、以及前述的LED10。卡盘套筒8以能够拆卸的方式安装有各种被驱动部件(作业输出部件)8a。各种被驱动部件8a包括:例如起子头、套管等。
本实施方式中,马达12为例如无刷马达。马达12产生的旋转驱动力(旋转力)、即后述的转子90(参照图4等)产生的旋转驱动力向驱动机构13传递。驱动机构13具备:例如未图示的减速机构及打击机构。减速机构使从马达12传递来的旋转驱动力的旋转速度减速。
打击机构可以具备:未图示的主轴、锤子及砧座。主轴通过经由减速机构而传递来的马达12的旋转驱动力进行旋转。锤子与主轴的旋转相对应地与主轴一同进行旋转。锤子还能够在与卡盘套筒8的旋转轴平行的方向上移动。砧座安装有卡盘套筒8。
打击机构中,当主轴与马达12的旋转相应地进行旋转时,砧座借助锤子而旋转。如果砧座进行旋转,则卡盘套筒8进行旋转(进而,被驱动部件8a进行旋转)。利用被驱动部件8a进行作业(例如将螺丝紧固于作业对象),如果向砧座施加的负载超过特定的水平,则通过锤子而对砧座施加打击。在卡盘套筒8的旋转方向上施加该打击。通过该打击而使得卡盘套筒8的旋转扭矩增加。
马达12的旋转驱动力进而向风扇14传递。当马达12旋转时,风扇14通过马达12的旋转驱动力而进行旋转。风扇14是为了将包括马达12在内的主体2内的各部分进行冷却而设置的。如果风扇14进行旋转,则在主体2内产生气流。该气流将主体2内冷却。
第二收纳部7设置有控制器15。控制器15执行电动作业机1所具有的各种功能。从装配于主体2的蓄电池组100向控制器15供给蓄电池101的电力。控制器15通过从蓄电池101供给的电力(以下称为“蓄电池电力”)进行动作。
把手6设置有:前述的触发操作部9、开关盒16、以及推杆17。开关盒16内置有后述的触发开关117(参照图3)。
触发操作部9借助推杆17而与开关盒16连结。当使用者对触发操作部9进行拉动操作时,推杆17与触发操作部9一同向拉动操作方向移动。本实施方式中,拉动操作是指:使触发操作部9向图2中的左方移动的操作。
触发操作部9通过未图示的弹性部件而向与拉动操作方向相反的方向施力。因此,触发操作部9在未对触发操作部9进行拉动操作时位于图2所示的初始位置。当对触发操作部9进行拉动操作时,触发操作部9从该初始位置向拉动操作方向移动。
触发开关117根据推杆17的位置而进行接通或断开。例如,未对触发操作部9进行拉动操作的情况下,触发开关117断开。如果对触发操作部9进行规定量以上的拉动操作,则触发开关117接通。
(1-2)电动作业机的电气构成
参照图3,对电动作业机1的电气构成进行补充说明。图3示出蓄电池组100装配于主体2的电动作业机1的电气构成。如图3所示,电动作业机1具备:马达12、控制器15、LED10、温度传感器18、3个旋转传感器71、72、73、触发开关117、以及蓄电池组100。马达12、LED10、温度传感器18、3个旋转传感器71、72、73、及触发开关117与控制器15连接。
蓄电池组100具备蓄电池101。蓄电池101为例如二次电池。蓄电池101可以为例如锂离子电池。蓄电池101也可以为与锂离子电池不同的二次电池。
温度传感器18设置于马达12。温度传感器18对马达12的温度进行检测。温度传感器18的电气特性根据温度而变化。温度传感器18构成为:输出与该电气特性的变化相对应的温度检测信号。本实施方式的温度传感器18为例如热敏电阻。温度传感器18可以为例如负温度系数(NTC)型的热敏电阻。
旋转传感器71、72、73设置于马达12,以便对转子90的旋转位置进行检测。具体而言,旋转传感器71、72、73设置成:以转子90的旋转轴为中心,沿着转子90的旋转方向,彼此隔开与电动角120度相当的角度。
旋转传感器71、72、73分别输出与转子90的旋转位置相对应的旋转检测信号。旋转检测信号被输入于控制器15。转子90为永久磁铁型的转子。旋转传感器71、72、73均对与转子90的旋转位置相对应的磁场变化进行检测。旋转传感器71、72、73均输出与所检测到的磁场变化相对应的旋转检测信号。
本实施方式中,旋转传感器71、72、73均为例如具备霍尔元件的霍尔传感器。从控制器15向各旋转传感器71、72、73供给电流。各旋转传感器71、72、73中,所供给来的电流流通于霍尔元件。霍尔元件具备检测面。霍尔元件产生与检测面中的检测面的垂直方向上的磁场的大小相对应的电动势。旋转传感器71、72、73均输出基于霍尔元件的电动势的旋转检测信号。
各旋转传感器71、72、73可以基于霍尔元件的电动势而输出任意旋转检测信号。例如,各旋转传感器71、72、73可以将霍尔元件的电动势直接作为模拟的旋转检测信号输出。另外,例如各旋转传感器71、72、73可以通过对霍尔元件的电动势进行放大等来转换霍尔元件的电动势的水平,从而作为模拟的旋转检测信号输出。另外,例如各旋转传感器71、72、73可以生成与霍尔元件的电动势相对应的二值的数字信号,将该数字信号作为旋转检测信号输出。
控制器15具备:马达驱动电路111、控制电路112、电源电路113、温度检测电路114、转子位置检测电路115、以及LED驱动电路116。
马达驱动电路111按照马达驱动指令将蓄电池电力转换为U相驱动电流、V相驱动电流及W相驱动电流。从控制电路112输入马达驱动指令。马达驱动电路111将U相驱动电流、V相驱动电流及W相驱动电流向马达12输出。U相驱动电流、V相驱动电流及W相驱动电流对马达12进行驱动。
电源电路113由蓄电池电力生成电源电力而输出。电源电力具有恒定的电源电压Vc。电源电力使控制器15内的各部分进行动作。控制电路112、温度检测电路114、转子位置检测电路115、及LED驱动电路116通过该电源电力而进行动作。
温度检测电路114基于从温度传感器18输入的温度检测信号而对马达12的温度进行检测。温度检测电路114将表示检测出的温度的信号向控制电路112输出。
本实施方式的温度检测电路114可以具备:例如与温度传感器18串联连接的电阻器。温度检测电路114可以构成为:对包括温度传感器18及电阻器在内的串联电路施加电源电压Vc。温度检测信号可以为温度传感器18与电阻器之间的连接点的电压。
转子位置检测电路115构成为:通过向旋转传感器71、72、73供给电流而使旋转传感器71、72、73进行工作。从旋转传感器71、72、73分别向转子位置检测电路115输入旋转检测信号。转子位置检测电路115基于从旋转传感器71、72、73输入的旋转检测信号而对转子90的旋转位置进行检测。转子位置检测电路115将表示检测出的旋转位置的信号向控制电路112输出。
LED驱动电路116按照从控制电路112输入的LED驱动指令向LED10供给电源电力,由此将LED10点亮。
控制电路112可以包括:例如未图示的CPU及存储器。例如,通过CPU执行存储器中所存储的各种程序,可以实现电动作业机1所具备的各种功能。
从触发开关117向控制电路112输入触发信号。触发信号表示触发开关117的接通或断开。当触发开关117接通时,控制电路112向马达驱动电路111输出马达驱动指令,由此对马达12进行驱动。
控制电路112可以被输入表示触发操作部9的拉动操作量的操作量信号。这种情况下,控制电路112可以输出与操作量信号相对应的(即,与拉动操作量相对应的)马达驱动指令。输出与操作量信号相对应的马达驱动指令意味着:使马达12的驱动参数(例如旋转扭矩、旋转速度等)根据拉动操作量而发生变化。
控制电路112在使马达12驱动时,参照从转子位置检测电路115输入的信号,输出与转子90的旋转位置相对应的马达驱动指令。控制电路112基于从温度检测电路114输入的信号,对马达12的温度进行监视。控制电路112进行与马达12的温度相对应的保护处理。保护处理可以包括如下处理,例如,马达12的温度为规定温度以上的情况下,使马达12的旋转速度降低或使旋转停止。
(1-3)马达的详细构成
参照图4~图6,对马达12的构成更详细地进行说明。如图4及图5所示,马达12具备:定子20和转子90。图4图示了通过马达12而旋转的风扇14。
由图4所示的马达12与风扇14之间的位置关系可知:图4示出了从与设置有风扇14的一侧相反一侧的、设置有驱动机构13的一侧观察马达12的状态。
转子90具备大致圆柱的形状。转子90内置有多个永久磁铁。具体而言,本实施方式的转子90具备4个磁铁96、97、98、99。磁铁96、97、98、99配置成:沿着转子90的旋转方向,彼此间隔等角度(本实施方式中为例如90度间隔)。磁铁96、97、98、99具备例如长条板状的形状。
转子90与从控制器15向定子20供给电力相应地进行旋转。向定子20供给电力是指:将前述的U相驱动电流、V相驱动电流及W相驱动电流中的至少1个向定子20供给。
如图4、图5所示,转子90设置有转轴91。转轴91与转子90一体地旋转。转轴91与驱动机构13连结。转子90的旋转驱动力经由转轴91而向驱动机构13传递。
定子20具备:定子支撑环21、以及6个定子齿22。定子齿22分别设置有台座部65。定子20还具备:第一相线圈、第二相线圈、以及第三相线圈。更详细而言,定子20具备:第一线圈31、第二线圈32、第三线圈33、第四线圈34、第五线圈35、以及第六线圈36。
第一相线圈包括:第一线圈31~第六线圈36中任意2个。第一相线圈中的2个线圈彼此串联连接。
第二相线圈包括:前述的第一线圈31~第六线圈36中的与第一相线圈不同的任意2个。第二相线圈中的2个线圈彼此串联连接。
第三相线圈包括:前述的第一线圈31~第六线圈36中的与第一相线圈及第二相线圈不同的2个。第三相线圈中的2个线圈彼此串联连接。
如图4~图6所示,定子支撑环21具备环状(例如两端呈开口的圆筒状)的形状。6个定子齿22在定子支撑环21的内周面沿着定子支撑环21的周向彼此以等间隔(例如60度间隔)设置。
如图6所示,各定子齿22在定子支撑环21的内周面朝向定子支撑环21的中心轴150(即、朝向定子支撑环21的径向)突出设置。应予说明,中心轴150与转子90的旋转轴同轴,即与转轴91的旋转轴同轴。
如图6所示,各定子齿22具备:定子齿主体23、定子齿前端部件24以及台座部65。定子齿主体23在定子支撑环21的内周面朝向中心轴150而突出设置。
定子齿前端部件24设置于定子齿主体23中的朝向中心轴150突出的端部。定子齿前端部件24具备大致板状的形状。定子齿前端部件24的与上述径向垂直的截面的面积大于定子齿主体23的与上述径向垂直的截面的面积。亦即,定子齿前端部件24相对于定子齿主体23而设置成凸缘状。
台座部65具备大致梯形的板状的形状。台座部65在定子齿前端部件24的表面朝向与该表面交叉的方向(例如垂直方向)竖立设置。定子齿前端部件24的表面与中心轴150对置(即、与转子90对置)。台座部65设置成:与台座部65的板面平行的面与中心轴150交叉。更具体而言,本实施方式的台座部65设置成:例如台座部65的板面与中心轴150垂直。各台座部65在定子20的径向上配置于比线圈31~36所存在的区域更靠近转子90的区域。换言之,各台座部65在径向上配置于设置有线圈31~36的区域与中心轴150之间的区域。
如图4及图5所示,台座部65在沿着中心轴150的方向上配置于转子90所存在的范围的外侧。更具体而言,台座部65在沿着中心轴150的方向上配置于比转子90更靠驱动机构13侧的位置。台座部65的第一板面与转子90中的驱动机构13侧的端面对置。台座部65的第二板面朝向电动作业机1的前方。
本实施方式中,如下文中参照图8所说明的那样,在3个台座部65各自的第一板面设置有旋转传感器71、72、73。
如图4、图5所示,第一线圈31~第六线圈36分别设置于任意1个定子齿22。更具体而言,第一线圈31~第六线圈36分别卷绕于对应的定子齿22中的定子齿主体23。
本实施方式中,第一相线圈、第二相线圈及第三相线圈例如彼此三角形连接。即,第一相线圈的第一端与第二相线圈的第一端连接,并且,与马达驱动电路111连接。从马达驱动电路111向第一相线圈的第一端供给例如前述的U相驱动电流。
第一相线圈的第二端与第三相线圈的第一端连接,并且,与马达驱动电路111连接。从马达驱动电路111向第一相线圈的第二端供给例如前述的V相驱动电流。
第二相线圈的第二端与第三相线圈的第二端连接,并且,与马达驱动电路111连接。从马达驱动电路111向第二相线圈的第二端供给例如前述的W相驱动电流。
本实施方式中,例如,第一线圈31和第四线圈34彼此串联连接。第一相线圈包括第一线圈31及第四线圈34。另外,例如,第二线圈32和第五线圈35彼此串联连接。第二相线圈包括第二线圈32及第五线圈35。另外,例如,第三线圈33和第六线圈36彼此串联连接。第三相线圈包括第三线圈33及第六线圈36。
第一相线圈、第二相线圈及第三相线圈可以利用与三角形连接不同的连接方法(例如星形连接)彼此连接。
如图6及图7所示,本实施方式的定子20具备:定子芯41、第一绝缘子42、以及第二绝缘子43。定子支撑环21及6个定子齿22是通过将第一绝缘子42、定子芯41、第二绝缘子43依次组合而构成的。
参照图7,对定子芯41、第一绝缘子42、及第二绝缘子43更具体地进行说明。
定子芯41包括磁性体。定子芯41具备:支撑芯51和6个芯齿52。支撑芯51为定子支撑环21的一部分。芯齿52为定子齿22的一部分。
支撑芯51具备环状(例如两端呈开口的圆筒状)的形状。6个芯齿52在支撑芯51的内周面沿着支撑芯51的周向彼此以等间隔(例如60度间隔)设置。各芯齿52在支撑芯51的内周面朝向支撑芯51的中心轴(即、前述的中心轴150)突出设置。
各芯齿52具备:芯齿主体53、以及芯齿前端部件54。芯齿主体53为定子齿主体23的一部分。芯齿前端部件54为定子齿前端部件24的一部分。
第一绝缘子42及第二绝缘子43包含绝缘性的原料。更具体而言,第一绝缘子42及第二绝缘子43包含例如以树脂为主成分的材料。
本实施方式的第一绝缘子42及第二绝缘子43是:例如通过包含树脂的材料而一体成型的树脂成型部件。第一绝缘子42及第二绝缘子43可以包含例如热固性树脂。第一绝缘子42及第二绝缘子43也可以包含例如热塑性树脂。第一绝缘子42及第二绝缘子43可以仅包含例如树脂。第一绝缘子42及第二绝缘子43也可以包含例如树脂及与树脂不同的绝缘性材料。第一绝缘子42及第二绝缘子43也可以仅包含例如与树脂不同的绝缘性材料。
第一绝缘子42及第二绝缘子43可以利用任意方法形成。第一绝缘子42及第二绝缘子43可以利用例如注射成型法形成。第一绝缘子42及第二绝缘子43也可以利用与注射成型法不同的方法形成。第一绝缘子42及第二绝缘子43可以由相同的材质形成,也可以由不同的材质形成。
如图7所示,第一绝缘子42具备:第一支撑环61和6个第一齿62。第一支撑环61为定子支撑环21的一部分。第一齿62为定子齿22的一部分。
第一支撑环61具备环状(例如两端呈开口的圆筒状)的形状。6个第一齿62在第一支撑环61的内周面沿着第一支撑环61的周向彼此以等间隔(例如60度间隔)设置。各第一齿62在第一支撑环61的内周面朝向第一支撑环61的中心轴(即、前述的中心轴150)突出设置。
各第一齿62具备:第一齿主体63、第一齿前端部件64以及前述的台座部65。第一齿主体63为定子齿主体23的一部分。第一齿主体63卷绕有第一线圈31~第六线圈36中的对应的任意线圈。第一齿前端部件64为定子齿前端部件24的一部分。台座部65设置于第一齿前端部件64。亦即,本实施方式中,台座部65包含以树脂为主成分的绝缘性的原料。
如图7所示,第二绝缘子43具备:第二支撑环56和6个第二齿57。第二支撑环56为定子支撑环21的一部分。第二齿57为定子齿22的一部分。
第二支撑环56具备环状(例如圆环状)的形状。6个第二齿57在第二支撑环56的表面沿着第二支撑环56的周向彼此以等间隔(例如60度间隔)设置。各第二齿57在第二支撑环56的表面朝向第二支撑环56的中心轴(即、前述的中心轴150)而设置。
各第二齿57具备:第二齿主体58以及第二齿前端部件59。第二齿主体58为定子齿主体23的一部分。第二齿前端部件59为定子齿前端部件24的一部分。
如图6及图7所示,定子20中,1个定子齿22是1个芯齿52、与该芯齿52对应的1个第一齿62、以及与该芯齿52对应的1个第二齿57组合而构成的。
(1-4)旋转传感器的配置位置
参照图8~图10,对马达12中的旋转传感器71、72、73的配置位置更具体地进行说明。
本实施方式中,旋转传感器71、72、73在定子20的径向上配置于比线圈31~36所存在的区域更靠近转子90的区域。换言之,旋转传感器71、72、73在径向上配置于设置有线圈31~36的区域与中心轴150之间的区域。具体而言,如图8~图10所示,旋转传感器71、72、73分别设置于6个台座部65中的任意1个。以下,将设置有旋转传感器71、72、73的3个台座部65分别称为“传感器搭载台座部65”。
旋转传感器71、72、73分别设置于对应的传感器搭载台座部65中的前述的第一板面(即、与转子90的端面对置的面)。旋转传感器71、72、73均设置成:与前述的磁场的检测面平行的面与中心轴150交叉。更具体而言,本实施方式的旋转传感器71、72、73均设置成:例如,磁场的检测面与传感器搭载台座部65的板面平行,即,磁场的检测面与转子90的旋转轴垂直。
如图9及图10所示,旋转传感器71、72、73均构成为:第一板面的整个区域或大致整个区域与转子90的端面对置。亦即,如图9所示,将马达12从其外部在沿着旋转轴的方向上观察时,旋转传感器71、72、73的全部或大致全部与转子90重叠。因此,各旋转传感器71、72、73中的霍尔元件的检测面的整个区域或大致整个区域与转子90的端面对置。
如图10所示,旋转传感器71、72、73配置成:与转子90之间具有距离Dg的间隔。本实施方式中,旋转传感器71、72、73设置于第一绝缘子42。第一绝缘子42为构成马达12的多个零部件之一。因此,例如与将旋转传感器71、72、73设置于与马达12分体的印刷基板的情形相比,能够抑制转子90的总长度,并且,能够使距离Dg变短。另外,旋转传感器71、72、73直接设置于第一绝缘子42而没有设置于印刷基板,因此,能够将距离Dg的公差抑制在较小值。据此,能够使旋转位置的检测精度得到提高。
如图11、图12所示,旋转传感器71具备多个端子。具体而言,本实施方式的旋转传感器71具备:例如第一端子71a、第二端子71b、以及第三端子71c。旋转传感器72、73与旋转传感器71同样,分别具备:例如第一端子71a、第二端子71b、以及第三端子71c。旋转传感器71、72、73分别借助第一端子71a、第二端子71b及第三端子71c而与控制器15连接。如图11、图12、图14所示,将旋转传感器71中的第一端子71a、第二端子71b及第三端子71c和控制器15电连接的电气配线(导体)的一部分设置于包括传感器搭载台座部65的第一表面的第一绝缘子42。以下,将上述电气配线中的设置于第一绝缘子42背面的部分称为“树脂配线部”。
如图11、12、14所示,与旋转传感器71对应的树脂配线部具备:第一配线图案151、第二配线图案152、以及第三配线图案153。
第一绝缘子42的背面中的、包括设置有旋转传感器71的第一齿62的表面在内的一部分的表面设置有第一沟161、第二沟162、以及第三沟163。第一配线图案151设置于第一沟161的底面161a(参照图14)。第二配线图案152设置于第二沟162的底面162a(参照图14)。第三配线图案153设置于第三沟163的底面163a(参照图14)。
第一沟161自第一端子71a的附近延伸存在。第一配线图案151的第一端与第一端子71a连接。第一配线图案151的第二端借助未图示的第一配线而与控制器15连接。
第二沟162自第二端子71b的附近延伸。第二配线图案152的第一端与第二端子71b连接。第二配线图案152的第二端借助未图示的第二配线而与控制器15连接。
第三沟163自第三端子71c的附近延伸。第三配线图案153的第一端与第三端子71c连接。第三配线图案153的第二端借助未图示的第三配线而与控制器15连接。
第一沟161、第二沟162及第三沟163自传感器搭载台座部65的第一表面经第一齿前端部件64的表面及第一齿主体63的表面而延伸至规定位置。第一沟161、第二沟162及第三沟163可以在例如通过注射成型法等将第一绝缘子42一体成型时形成。
第一配线图案151、第二配线图案152及第三配线图案153可以利用任意方法进行设置。本实施方式中,第一配线图案151、第二配线图案152及第三配线图案153可以与例如第一绝缘子42一体地形成。
亦即,本实施方式的第一绝缘子42是模压互连器件(MID)的一种。MID是指:形成有导体图案的树脂成型部件。第一绝缘子42中,第一配线图案151、第二配线图案152及第三配线图案153与MID中的导体图案相对应。
MID可以利用各种方法形成。作为MID的形成方法之一,已知有激光直接成型(LDS)法。第一配线图案151、第二配线图案152及第三配线图案153可以通过例如LDS法而形成于第一绝缘子42。
对包括旋转传感器71及对应的树脂配线部在内的第一绝缘子42的制造工序的一部分概要地进行说明。制造工序具备:例如以下的第一工序、第二工序及第三工序。
第一工序中,通过例如注射成型法,形成第一绝缘子42。图13示出到第一工序为止得到的第一绝缘子42的一部分。如图13所示,在第一工序完成的时刻,形成有第一沟161、第二沟162及第三沟163,但是,尚未设置旋转传感器71及对应的树脂配线部。
第二工序中,在传感器搭载台座部65的第一表面搭载旋转传感器71。
第三工序中,通过例如LDS法,形成第一配线图案151、第二配线图案152及第三配线图案153。第三工序中,第一配线图案151的第一端与第一端子71a连接,第二配线图案152的第一端与第二端子71b连接,第三配线图案153的第一端与第三端子71c连接。图11、12、14例示了到第三工序为止得到的第一绝缘子42。
旋转传感器72及对应的树脂配线部以与上述的旋转传感器71及对应的树脂配线部相同的方式设置。旋转传感器73及对应的树脂配线部以与上述的旋转传感器71及对应的树脂配线部相同的方式设置。应予说明,图8中,省略了上述的树脂配线部的图示。
(1-5)实施方式的效果
根据以上说明的实施方式,发挥出以下的(1a)~(1f)的效果。
(1a)本实施方式的电动作业机1中,旋转传感器71、72、73设置于定子20。并且,旋转传感器71、72、73在定子20的径向上设置于比第一线圈31~第六线圈36所存在的区域更靠近转子90的区域、即靠近中心轴150的区域。因此,能够使旋转传感器71、72、73接近转子90而不会使转子90大型化。据此,能够采用旋转传感器71、72、73精度良好地检测转子90的旋转位置。
(1b)本实施方式的电动作业机1中,旋转传感器71、72、73设置于第一绝缘子42。因此,能够简化将旋转传感器71、72、73设置于马达12的作业。
(1c)本实施方式的电动作业机1中,旋转传感器71、72、73均设置于第一绝缘子42中的第一齿62。因此,能够将旋转传感器71、72、73容易地配置于比第一线圈31~第六线圈36更靠近转子90的位置。
(1d)本实施方式的电动作业机1中,在第一齿62的前端侧设置有台座部65。旋转传感器71、72、73均设置于台座部65。因此,能够将旋转传感器71、72、73可靠且稳定地配置于比第一线圈31~第六线圈36更靠近转子90的位置。
(1e)本实施方式的电动作业机1中,台座部65在沿着转子90的旋转轴的方向上配置于比转子90更靠外侧的位置。台座部65进一步设置成:台座部65的板面与转子90的端面对置。因此,能够将各旋转传感器71、72、73容易地设置于台座部65。此外,能够将旋转传感器71、72、73设置成与转子90的端面对置。据此,能够利用旋转传感器71、72、73更适当地检测伴随于转子90的旋转而产生的磁场变化。
(1f)本实施方式的电动作业机1中,台座部65设置成:台座部65的板面与转子90的旋转轴垂直。因此,能够抑制伴随于在马达12设置台座部65及旋转传感器71、72、73而产生的马达12大型化,并且,能够适当地检测转子90的旋转位置。
卡盘套筒8相当于本发明中的驱动部的一例。定子支撑环21相当于本发明中的圆筒体的一例。定子齿22相当于本发明中的齿的一例。第一线圈31~第六线圈36分别相当于本发明中的线圈的一例。第一绝缘子42相当于本发明中的绝缘子的一例。支撑芯51相当于本发明中的芯筒体的一例。芯齿52相当于本发明中的芯齿的一例。第一支撑环61相当于本发明中的绝缘子筒体的一例。第一齿62相当于本发明中的绝缘子齿的一例。第一齿62中的第一齿主体63相当于本发明中的齿体部的一例。第一齿62中的第一齿前端部件64相当于本发明中的前端部件的一例。
[2.其他实施方式]
以上,对本发明的实施方式进行了说明,但是,本发明不限定于上述的实施方式,可以进行各种变形而实施。
(2-1)旋转传感器可以在定子中的比线圈更靠近转子的范围内设置于任意位置。将旋转传感器的另一配置例示于图15。图15所示的第一绝缘子120具备6个第一齿122。各第一齿122具备第一齿主体123和第一齿前端部件124。第一齿主体123与上述实施方式的第一齿主体63(参照图7)相同。第一齿前端部件124与上述实施方式的第一齿前端部件64相同。各第一齿122与上述实施方式的第一齿62不同,未设置台座部65。旋转传感器71、72、73均设置于第一齿62中的第一齿前端部件124的表面。
旋转传感器71、72、73可以配置于与上述实施方式及图15不同的位置。
(2-2)马达可以设置有例如2个以下的旋转传感器,也可以设置有例如4个以上的旋转传感器。
(2-3)上述实施方式中,在6个定子齿22分别设置有台座部65,不过,也可以不在全部的定子齿22都设置台座部65。例如,可以仅在设置有旋转传感器的定子齿22设置台座部65。
(2-4)台座部可以为任意形状。台座部可以设置于定子齿22的任意位置。
(2-5)将旋转传感器71、72、73配置成在沿着中心轴150的方向上观察马达12时旋转传感器71、72、73的大致整体或整体与转子90重叠不是必须的。旋转传感器71、72、73可以配置于:在沿着中心轴150的方向上观察马达12时未与转子90重叠的位置。
(2-6)各旋转传感器71、72、73可以具备与霍尔元件不同的磁场检测元件。具体而言,旋转传感器71、72、73可以分别具备例如磁阻元件(Magneto Resistive Sensor)。亦即,各旋转传感器71、72、73可以利用任意构成或方法来检测与转子90的旋转位置的变化相对应的磁场变化。各旋转传感器71、72、73可以利用任意构成或方法输出与检测到的磁场变化相对应的旋转检测信号。
(2-7)转子90可以具备若干永久磁铁。转子90中,永久磁铁可以任意配置。
(2-8)上述实施方式的马达12为所谓的内转子型的马达,不过,本发明也能够适用于所谓的外转子型的马达。
外转子型的马达具备:定子、以及在定子的径向外侧所设置的转子。定子具备:圆筒体、多个齿、以及多个线圈。多个齿竖立设置于圆筒体的外周面。多个线圈分别卷绕于多个齿中的1个。多个线圈分别通过接受电力而产生磁力。像这样构成的外转子型的马达中,也可以应用本发明。具体而言,旋转传感器也可以配置于:在定子的径向上比多个线圈所存在的区域更靠近转子的区域、即在径向上比多个线圈所存在的区域更靠外侧(外周侧)的位置。
(2-9)马达12也可以为无刷马达以外的马达。另外,电动作业机1也可以通过与蓄电池电力不同的电力而进行动作。例如,电动作业机1可以具备:构成为被输入商用的交流100V的交流电力且能够通过该交流电力而驱动的马达。
(2-10)上述实施方式中,作为电动作业机的一例,例示了充电式冲击起子,不过,本发明的技术可以应用于构成为对作业对象进行作业的其他电动作业机。作业对象可以为任意对象,例如可以为木材、金属、塑料等各种被加工材料;螺丝、钉子、螺母等各种固定件;植物、粉尘、气体、液体等。电动作业机可以具备任意被驱动部件。被驱动部件可以任意作用于作业对象。被驱动部件可以为例如以对被加工材料进行开孔的方式进行作用的钻头,也可以为以将被加工材料切断的方式进行作用的旋转刀,还可以为以对被加工材料进行研磨的方式进行作用的磨削磨石,还可以为以使气体或液体流出或流入的方式进行作用的旋转翼。
本发明的技术可以应用于例如DIY、制造、园艺、工程等作业现场中使用的各种现场用电气设备。具体而言,本发明的技术可以应用于例如石工用、金工用、木工用的电动工具、园艺用的作业机、对作业现场的环境进行整顿的装置等具备被驱动部件的各种电动作业机。更具体而言,本发明可以应用于例如电锤、电动锤钻、电动钻、电动起子、电动扳手、电动磨床、电动圆锯、电动往复锯、电动线锯、电动切割机、电动链锯、电动刨、电动钉枪(包括铆接机)、电动绿篱机、电动割草机、电动草坪修整机、电动收割机、电动吸尘器、电动鼓风机、电动喷雾器、电动撒布机、电动集尘机等各种电动作业机。
(2-11)可以将通过上述实施方式中的1个构成要素实现的多个功能通过多个构成要素来实现,或者可以将通过1个构成要素实现的1个功能通过多个构成要素来实现。另外,可以将通过多个构成要素实现的多个功能通过1个构成要素来实现,或者可以将通过多个构成要素实现的1个功能通过1个构成要素来实现。另外,可以省略上述实施方式的构成的一部分。另外,可以将上述实施方式的任意1个中的构成要素针对另1个实施方式进行附加或置换。
- 运行用于作业机械的至少一个电动设备的电动运行系统和包含该电动运行系统的作业机械
- 电动作业机、现场电气系统、以及用于诊断电动作业机的方法