基于多尺度多特征的高光谱图像亚像元定位方法
文献发布时间:2023-06-19 12:07:15
技术领域
本发明涉及遥感图像处理技术领域,尤其涉及一种基于多尺度多特征的高光谱图像亚像元定位方法。
背景技术
遥感是一门对地观测的科学技术,高光谱遥感是其中的一项前沿技术手段,其特点是既能成像又能测谱,可以反映物质的诊断性特征。高光谱图像可以看作是一个数据立方体,包含丰富的光谱和空间信息,但是由于采集方法和成像光谱仪性能的限制,高光谱图像的空间分辨率一般较低,对应于像素的瞬时视场角通常包含有多种类型的地面信息,即通常所说的混合像元。
传统硬分类技术在分类过程中,将每个像元归为一种地物类别,即传统基于像元的硬分类器将每个像元视为纯像元。因为混合像元的存在,就会导致一些这些分类算法丢失一些有用的信息,从而不能准确反映地物实际的空间分布状况。针对混合像元的问题,发展出了软分类技术,这种技术可以计算出混合像元中所有类别在像元所占的混合比例(丰度),能够获得更多的关于地物的信息。然而,尽管软分类技术可以预测出混合像元内的每种地物类别的比例,但是仍然不能获知每种地物类别在混合像元中具体的空间分布位置。为了解决这一问题,发展出了亚像元定位技术。
现有的亚像元定位技术主要可以分为两类,第一类是传统的基于像元或亚像元上提取空间相关性,并针对地物类别不同的空间分布特征,采取相应的亚像元定位方法获得更高精度的硬分类图,例如基于多智能体系统的自适应遥感图像亚像元定位、基于地理对象空间分布模式的增强型亚像元定位,这类方法只在像元或亚像元尺度上描述地物的空间相关性,忽略了整体空间结构,容易造成锯齿状边缘。另一类是基于超像素对象区域提取的空间相关性方法,例如使用多尺度空间相关性的亚像元定位、基于对象的超分辨率遥感图像地物覆盖定位,这类方法主要是提取了超像素尺度上的空间相关性,通过融合三种尺度上的空间相关性,不断地迭代优化来完成定位。但是,这类方法通常将地物分布特征视为同一类型,对具有不同分布特征的类别的定位可能造成误判,例如有些典型的线状地物(公路或河流),超像素分割可能会将线状类别划分到面状区域中,就会导致线性地物的连接性丧失。高光谱图形的地物空间信息很丰富,但是混合像元的存在,使分类技术很大程度上会丢失一部分信息,这一问题极大地程度上限制了高光谱图像的应用。
发明内容
根据现有技术存在的问题,本发明公开了一种基于多尺度多特征的高光谱图像亚像元地位方法,具体包括:
对高光谱图像降采样并对其进行超像素分割,计算基于超像素和基于像素的软分类,初始化亚像元定位;
计算超像素尺度、像元尺度和亚像元尺度上的空间吸引力值,计算超像素区域的区域周长,构建结合区域周长的多尺度空间相关性模型;计算相关系数,找出最佳模板;
判断地物类别分布特征,针对呈线状特征分布的地物类别进行如下方法的定位:计算目标亚像元与最佳模板中值为1的元素间的距离,以距离最小为条件、将目标亚像元与该元素位置的亚像元进行交换;对呈面状特征分布的地物类别进行如下方法的定位:计算亚像元交换前后的区域周长以及多尺度空间相关性,符合条件的两个亚像元进行交换;
基于上述两种方法不断迭代完成亚像元定位,通过在不同地物分布特征上应用亚像元定位,在不同尺度上提取空间相关性,从而保留更多空间分布细节,获得高分辨率的地物分类图。
首先对高光谱图像进行缩放尺度因子为S的降采样,用SLIC算法对高光谱图像进行超像素分割,计算基于超像素和基于像元的软分类结果,利用所获得的丰度作为约束,计算不同地物类别在混合像元中所占亚像元的个数,初始化亚像元定位。计算区域周长,构建多尺度空间相关性模型,公式如下:
其中v
判断地物的分布特征,对呈线状特征分布的地物类别进行模板匹配交换的亚像元定位。设置8个S×S的二进制模板T
其中,t(m,n)∈{0,1},m,n=-1,0,1。
计算以亚像元v
其中,S
针对面特征地物进行结合了区域周长的多尺度空间相关性迭代交换的亚像元定位。随机选择亚像元v
为了得到公式(1)中三种空间相关性,采用如下公式计算:
计算亚像元尺度上的空间相关性,以亚像元v
其中,P
在亚像元v
其中,n
超像素尺度上的空间相关性,计算公式如下:
其中,K表示与亚像元v
由于采用了上述技术方案,本发明提供了一种基于多尺度多特征的高光谱图像亚像元定位方法,该方法针对高光谱图像存在的混合像元的问题,采用一种结合了区域周长的融合的多尺度空间相关性方法以及模板匹配交换方法,对不同地物类别的空间分布特征,采用不同的亚像元定位方法。具体而言就是,用模板匹配交换的亚像元定位方法对线状特征的地物类别进行定位;用结合了区域周长的多尺度空间相关性的方法对面状特征的地物类别进行亚像元定位。该方法能够很好的保留地物线状特征的连通性,保证整体空间结构的完整性,也保留了局部边界信息的平滑性。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
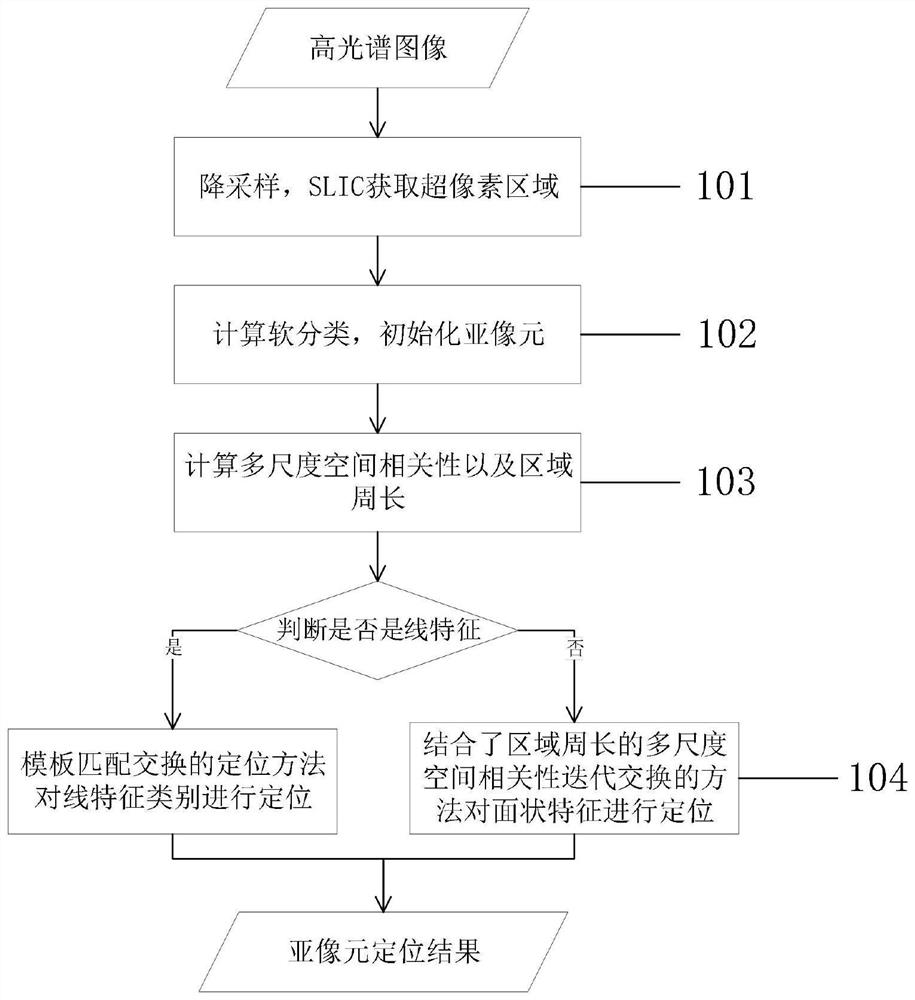
图1为本发明提供的方法的流程图;
图2为本发明中亚像元定位原理示意图;
图3a-图3d为本发明中AVIRISIndianPines数据集、地面参考图、初始化亚像元图以及定位结果示意图;
图4a-图4d为本发明中ROSISUniversityofPavia数据集、地面参考图、初始化亚像元图以及定位结果示意图。
具体实施方式
为使本发明的技术方案和优点更加清楚,下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚完整的描述:
如图1所示的一种基于多尺度多特征的高光谱图像亚像元定位方法具体包括以下步骤:
假定一幅原始高光谱图像记为
步骤101:对高光谱图像降采样,对降采样后的图像进行超像素分割,获取超像素区域。
具体来说,假设重建尺度为S,对原始高光谱图像进行S×S的降采样,得到一个粗糙空间分辨率的高光谱图像;采用SLIC算法对其进行超像素分割,获得超像素对象区域。
步骤102:计算丰度,并初始化亚像元定位;
具体来说,根据上一步所得超像素区域,计算像元和超像素上的软分类结果(丰度),根据丰度约束,计算混合像元中每种类别所占亚像元的个数,初始化亚像元定位图。
步骤103:构建结合了区域周长的多尺度空间相关性模型;
具体来说,基于空间相关性假设理论,根据上一步所得的丰度,计算多尺度空间相关性以及区域周长,具体公式为:
其中v
其中
其中,P
步骤104:针对地物类别的不同空间分布特征,采用相应的亚像元定位方法。
具体来说,根据每种地物类别不同的分布特征,对呈线状特征分布的地物类别用模板匹配交换的方法,通过迭代逐步完成这类地物的亚像元定位;对呈面状特征分布的地物类别用结合了区域周长的多尺度空间相关性的方法,通过迭代交换逐步优化地物间的相关性,从而达到亚像元定位的目的。上述两步完成后,得到一个地物硬分类结果图。
实施例:
下面按照上述方法步骤,采用两组公开真实的高光谱图像数据集,对本发明提供的一种基于多尺度多特征的高光谱图像亚像元定位方法进行测试说明,以及应用效果分析和评价。
1.数据集及参数设定
(1)AVIRIS Indian Pines数据集
本实验所采用的第一组数据集是由AVIRIS(Airborne Visible/InfraredImaging Spectrometer)传感器于1992年在美国印第安纳州西北区域获取的高光谱数据集。图像尺寸为145×145,共计包含21025个像元,空间分辨率为20m,波段范围为0.25~2.4μm,共计220个波段。附图3a展示了该数据集的第186波段的图像,附图3b是对应的地面参考图像,共包含16种真实地物类别,本实验选取该数据的135×135的大小作为亚像元定位实验的数据,测试了两个缩放尺度因子(3,5)。
(2)ROSIS University of Pavia数据集
本实验所采用的第二组数据集是由ROSIS(Reflective Optics System ImagingSpectrometer)传感器于2001年在意大利帕维亚地区获取的帕维亚大学高光谱数据集。图像尺寸为610×340,共计包含207400个像元,空间分辨率为1.3m,波段范围为0.43~0.86μm,共计103个波段。附图4a展示了该数据集的第35波段的图像,附图4b是对应的地面参考图像,共包含9中真实地物类别,总计42776个已知标签样本,本实验选取270×180大小的该高光谱图像数据集作为实验用的数据,测试了三个缩放尺度因子(3,5,6)。本实验中类别3、类别6和类别7由于截取数据的原因,不在实验范围内。
2.实验评价指标
(1)整体精度(Overall Accuracy,OA)
整体精度OA的定义形式为:
其中Y
(2)Kappa系数(k statistic)
Kappa系数是一种定量评价遥感分类结果图像与地面参考图像之间一致性的方法,能够体现整体图像的分类误差性,定义形式为:
其中
(3)类别精度(Class-dependent Accuracy,CA)
类别精度CA的定义形式为:
CA=Y
3.实验结果分析及评价
本发明提供了一种基于多尺度多特征的高光谱图像亚像元定位方法(MSMF SPM),使用两组真实高光谱图像数据实验的结果如表1-表2所示,对应的亚像元定位结果图像如附图3d、附图4d所示。
本实验引入了基于像元空间交换的亚像元定位方法(PSA)、像元空间引力优化算法(SAOM)、基于线特征探测的亚像元定位方法(SPMLF)、多尺度空间相关性的亚像元定位方法(MSD)以及一个随机定位。根据定位结果,可以分析得到以下结论:
(1)相较于PSA和SAOM,MSMF亚像元定位方法能取得更好的定位效果,证明了本发明提供的多尺度多特征亚像元定位方法对于解决高光谱图像混合像元的问题的良好效果。
(2)相较于SPMLF和MSD,本发明提供的多尺度多特征的亚像元定位方法(MSMF)取得了更高的整体精度,对于典型的线状特征能够保持线特征的完整性,并且对分布范围较小的地物类别也具有良好的定位效果。
表1 AVIRIS Indian Pines数据集定位结果
表2 ROSIS University of Pavia数据集定位结果
本发明针对高光谱图像存在的混合像元的问题,提供了一种基于多尺度多特征的高光谱图像亚像元定位(MSMFSPM)方法。该方法首先对原始高光谱图像进行缩放尺度因子为S的降采样,对所获得的粗糙空间分辨率的图像用SLIC算法进行超像素分割;计算基于像元以及基于超像素的软分类结果,根据丰度约束,计算混合像元内每种地物类别所占亚像元的个数,获得初始化定位图;采用一种结合了区域周长的多尺度空间相关性方法以及一种模板匹配交换方法,针对不同地物类别的空间分布特征,采用不同的亚像元定位方法。具体而言就是,用模板匹配交换的方法对线状特征的地物类别进行亚像元定位;用结合了区域周长的多尺度空间相关性方法对面状特征的地物类别进行亚像元定位。MSMFSPM能够很好的保留地物线状特征的连通性,保证整体空间结构的完整性,又能够保留局部边界信息的平滑性。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 基于多尺度多特征的高光谱图像亚像元定位方法
- 一种空间引力描述下的高光谱图像亚像元定位方法