用于与放射治疗装置一起使用的方法
文献发布时间:2023-06-19 12:10:19
技术领域
本公开涉及预测性维护和远程诊断领域,具体地涉及确定是否安排放射治疗装置中的电子枪的修理或更换、确定放射治疗装置中的故障的性质以及确定是否应当安排放射治疗装置的维护的方法。
背景技术
放射治疗装置是现代癌症治疗中的重要工具。放射治疗装置是大型、复杂的机器,具有许多移动零件和互操作的机构。尽管进行了精确的工程设计和严格的测试,但是放射治疗装置的一些组成部分可能在其寿命期间开始劣化。这有时可能导致次优操作,甚至偶尔会导致安全超控。
如果在治疗期间的任何点,放射治疗装置开始在其正常操作参数之外起作用,则发生安全超控或“中断”,由此机器停止递送辐射以确保患者安全。这种情况是不方便的,因为它增加了治疗时间,并且在一些情况下意味着治疗期必须过早地结束。计划外的设备停机时间可能打乱计划的治疗日程表,并且可能由于收入、维修和修理成本或两者的损失而对所有者来说是昂贵的。
已经推测预测性维护和/或远程诊断技术可以应用于放射治疗机。然而,考虑到机器的复杂性和在操作期间可能收集的数据的绝对量,难以知道如何分析任何可用数据以通知预测性维护技术。例如,虽然特定数据模式可以指示特定故障或指示特定部件已经劣化到它不久将开始在其最佳操作参数之外操作的程度,但是识别特定数据模式与特定故障或劣化部件之间的联系即使对于有经验的维修工程师也常常是不直观的。即使当识别出有问题的机器时,考虑到数据的丰富性和机器的各个部件之间的复杂相互关系,试图确定故障的性质也是非常困难的。换言之,即使来自放射治疗装置的大量数据是可用的,远程确定故障的性质或评估特定部件的状况也不是微不足道的事情。
本公开部分地涉及识别放射治疗装置的电子枪接近其应当被更换或修理的时间。迄今为止,还没有这样的预测方法,并且现有的维修和修理方法涉及注意到特定装置已经经历了多个安全超控,并且派遣现场维修工程师检查机器并诊断和解决问题。通常,问题的类型或有故障的部件事先是未知的,因此必须现场执行耗时的诊断测试。因此,现有的方法导致大量的机器停机时间。而且,在现有方法中,直到部件已经劣化到放射治疗机正在经历安全中断的点或者甚至直到放射治疗机无法在其安全参数内操作的点,现场维修工程师才意识到潜在问题。这意味着放射治疗机的维修通常安排在现场维修工程师资源和医院或其他机器所有者的资源都不方便或低效的时间。
本发明通过提供优选地远程确定是否应当安排放射治疗装置中的电子枪的修理或更换、确定放射治疗装置中的故障的性质以及确定是否应当安排放射治疗装置的维护的方法,来设法解决现有技术中遇到的这些和其它缺点。
发明内容
在独立权利要求中阐述了本发明。在从属权利要求中阐述了可选特征。
根据本发明的一个方面,提供了一种确定是否应当安排放射治疗装置的电子枪的修理或更换的方法。放射治疗装置包括线性加速器。装置被配置为向患者提供治疗辐射,并且包括:真空管,该真空管包括电子枪,波导管,该波导管被配置为使由电子枪朝向靶发射的电子加速以产生所述辐射;和电流传感器。电流传感器被配置为提供指示供应给电子枪的电流的信号。方法包括:接收电流值;处理电流值;以及基于对电流值的处理,确定是否应当安排电子枪的修理或更换。对电流值的处理包括:确定电流值是否满足至少一个阈值准则;以及确定电流值是否在特定时间段内已经改变了至少阈值量。
根据本发明的另外方面,提供了一种确定是否应当安排放射治疗装置的维护的方法,放射治疗装置包括线性加速器并且被配置为向患者提供治疗辐射,放射治疗装置包括:真空管,该真空管包括:电子枪;波导管,该波导管被配置为使由电子枪朝向靶发射的电子加速以产生所述辐射;和电流传感器,电流传感器被配置为提供指示供应给电子枪的电流的信号;方法包括:接收从由电流传感器提供的信号导出的电流值;处理电流值以确定电流值是否满足至少第一阈值准则;确定电子枪处于辐射模式的总时间量是否满足至少第二阈值准则;以及如果满足第一阈值准则和第二阈值准则,则确定是否应当安排放射治疗装置的维护。
根据本发明的另外方面,提供了一种确定放射治疗装置中的故障的性质的方法,放射治疗装置包括线性加速器并且被配置为向患者提供治疗辐射,放射治疗装置包括:台架,该台架被配置为使真空管围绕患者旋转,使得辐射可以围绕患者从多个角度和/或方向被引导朝向患者;真空管,该真空管包括:电子枪;波导管,该波导管被配置为使由电子枪朝向靶发射的电子加速以产生所述辐射;和电压传感器,该电压传感器被配置为提供指示施加到电子枪的电压的信号,方法包括:接收在台架的旋转期间从由电压传感器提供的信号导出的电压值;处理电压值,其中,处理电压值包括:确定电压值是否满足至少一个第一阈值准则;以及基于电压值的处理,确定故障的性质是否与电子枪相关联。
附图说明
现在参考附图仅以示例的方式描述具体实施例,附图中:
图1描绘了包括LINAC的放射治疗装置的示意图;
图2描绘了根据本公开的系统;
图3描绘了示出可以在本公开的方法中使用的数据的曲线图;
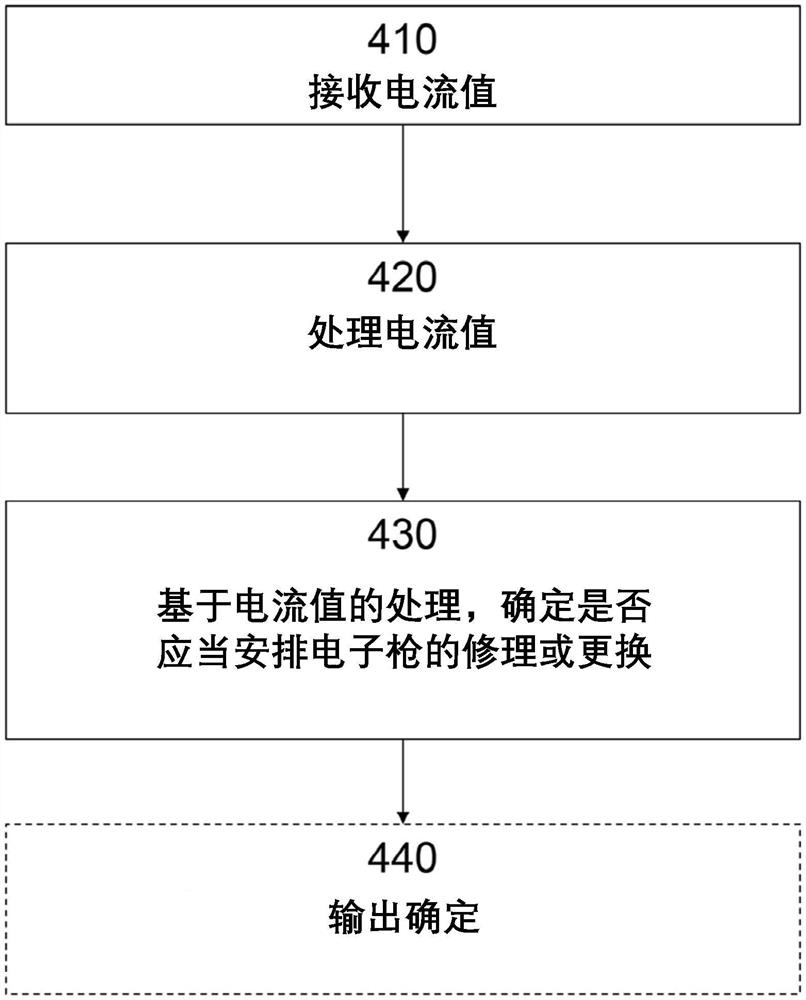
图4是描绘了根据本公开的方法的流程图;
图5是描绘了根据本公开的方法的流程图;
图6描绘了示出由根据本公开的传感器生成的真空或压力值的曲线图;
图7描绘了根据本公开的真空管的区域;
图8a和图8b是描绘了根据本公开的方法的流程图;
图9a和图9b是描绘了根据本公开的方法的流程图;以及
图10是描绘了根据本公开的方法的流程图。
具体实施方式
本公开涉及一种确定放射治疗机或装置的一个或多个部件是否应当维修或更换和/或确定这样的部件在安全参数和最佳操作参数内操作到什么程度的方法。放射治疗装置可以适于向患者递送辐射束以便治疗肿瘤。用于产生治疗辐射束的辐射源的示例是线性加速器(Linear Accelerator,LINAC)。临床LINAC装置被配置为向患者递送高能辐射。
放射治疗机开始被配置为在它们操作时产生和记录大量数据;例如,放射治疗机被配置为提供来自各种不同传感器的传感器读数。这些传感器产生可以存储在数据库中的数据。放射治疗装置还可以被配置为允许远程连接,这使得维修工程师能够访问关于任何连接的机器的大量信息,而不必行进到机器所位于的地点。在许多情况下,预期的是,在工程师不必与机器进行物理交互的情况下,机器可以返回到最佳性能。然而,仍然存在故障无法被远程修复的情况,并且必须派遣工程师以:检查机器;确定故障的性质;并执行任何所需的维护。如果修理涉及更换零件,则在机器可以恢复在线之前需要另外的机器停机时间。
本发明的一些方法涉及在放射治疗设备的部件的操作期间评估其状况和/或性能,以便优选远程地识别和确定该部件是否接近其操作寿命的终点,并因此确定是否应当更换或修理该部件。本发明的其他方法涉及确定放射治疗装置中的故障的性质或确定是否应当安排放射治疗装置的维护。本申请部分地涉及确定电子枪的阴极的灯丝是否接近其操作寿命的终点。这种技术是有利的,因为它们允许制造商或维护服务提供商注意机器,知道在到达之前将需要什么来修复机器。一些公开的技术允许监测电子枪的操作,因此可以识别接近其操作寿命的终点但仍在所需安全参数内操作的电子枪阴极灯丝。这又允许例如为下一个方便的维修点安排电子枪的修理和/或更换。所公开的方法有助于减少机器停机时间,从而使对机器正常操作的中断最小化。所公开的技术还可用于更有效地计划机器停机时间,以便获得对于设备的所有者和/或患者而言更方便或更具成本效益的时间。
如上所述,本申请部分涉及确定放射治疗装置中的故障的性质,特别是确定电子枪是否有故障。例如,本发明的一些方法涉及确定放射治疗装置的电子枪已经从其载体上松动,或者更具体地,确定电极枪的阴极已经从其载体上松动。这可能导致放射治疗装置次优地操作。这种技术是有利的,因为它们允许制造商或维护服务提供商注意机器,知道在到达之前将需要什么来修复机器。所公开的技术可以有助于减少机器停机时间,从而使对机器正常操作的中断最小化。所公开的技术还可用于更有效地计划机器停机时间,以便获得对于设备的所有者和/或患者而言更方便或更具成本效益的时间。
如上所述,本申请部分涉及确定是否应当安排放射治疗装置的维护,特别是由于放射治疗装置的真空管中的真空质量的问题。真空管中的差真空质量可能负面地影响电子枪的称为枪寿命的操作寿命。由此可见,识别这种真空质量问题并安排放射治疗装置的维护以解决真空质量问题可以延长放射治疗装置的电子枪的枪寿命。通常,在电子枪更换期间引入真空质量问题。例如,在更换电子枪的过程期间可能引入真空泄漏或污染。
如本领域技术人员所知,LINAC包括电子枪,该电子枪操作为按下面进一步描述的方式将电子注入到波导管中。电子枪包括阴极,该阴极适于经由热电子发射过程发射电子,并被配置为经由热电子发射过程发射电子。阴极包括灯丝,灯丝或者由合适的发射材料制成、涂布有合适的发射材料或者以其他方式包括合适的发射材料。电流穿过阴极灯丝以便将其加热,并且发射材料将电子发射至真空管中,然后电子在波导管中朝向靶加速。合适的阴极涂层包括氧化钡、氧化锶和氧化钙。以另一示例的方式,灯丝可以是镀钍钨的灯丝,在这样的布置中,少量的钍被添加到包括灯丝的钨材料。
然而,电子枪中使用的阴极灯丝仅具有有限的操作寿命。这是因为在涂布的阴极上的发射层随时间缓慢地劣化。当灯丝或灯丝涂层劣化时,随着灯丝被加热,发射更少的电子。而且,虽然电子枪通常位于UHV环境中的真空管中,但是阴极灯丝仍然接触少量的气体分子。这些气体分子可能被吸收到阴极的涂层中,这引起阴极灯丝材料的进一步劣化。这导致发射率降低,如果真空管中存在任何小的泄漏,则这种降低加剧。
电子枪寿命或“枪寿命”是电子枪可以在电子发射的速率下降到可接受的速率以下之前在辐射模式下操作的总时间量,其中电子由电子枪发射。预期的枪寿命仅仅是电子枪在电子发射速率下降到可接受的速率以下之前可以在辐射模式下操作的预期时间量。示例的预期枪寿命是在辐射模式下操作的1000小时。
辐射模式或激活模式是电子枪发射电子的模式。相反,待机模式或非激活模式是电子枪不发射电子的模式。
LINAC的高级概述
图1描绘了适于在放射治疗期间向患者递送辐射束并且被配置为向患者递送辐射束的LINAC。在操作中,LINAC装置产生并成形辐射束,并根据放射治疗计划将其引向患者体内的靶区域。
医疗LINAC机器必然是复杂的,具有许多互操作的组成部分。将关于图1所描绘的LINAC装置给出典型LINAC的操作的简要概述,该装置包括射频波源、波导管、电子源、包括一个或多个真空泵130的能够产生强真空的系统、当被电子束撞击时产生X射线的重金属靶、以及能够将电子束重定向并聚焦到靶上的复杂磁铁布置。图1中描绘的装置还包括治疗头,该治疗头容纳被配置为例如准直所产生的X射线束并使其成形的各种设备。
例如磁控管的射频波源102产生射频波。射频波源102耦合到波导管104,并被配置为将射频波脉冲到波导管104中。射频波从射频波源102穿过RF输入窗口并进入RF输入连接管道或管。RF输入连接管道或管与波导管联接,并且可以如图1所示以基本上90°的角度接合波导管。连接管或管道可以经由所谓的“弯管接头”或“T形接头”接合波导管。例如电子枪的电子源106耦合到波导管104,并且被配置为将电子注入到波导管104中。在电子源106中,当灯丝被加热时,电子从阴极灯丝热离子地发射。灯丝的温度控制注入的电子的数量。电子注入到波导管104中与射频波到波导管104中的泵浦同步。射频波源102、电子源106和波导管104的设计和操作使得射频波在电子传播穿过波导管104时将电子加速到非常高的能量。
波导管104的设计取决于LINAC是使用驻波还是行波来加速电子,但是波导管通常包括一系列单元或腔,各个腔由电子束可以穿过的孔或“光圈”连接。腔联接以便产生适当的电场图案,该电场图案加速传播穿过波导管104的电子。当电子在波导管104中被加速时,电子束路径由围绕波导管104的操纵磁铁或操纵线圈的适当布置来控制。操纵磁铁的布置可以包括例如两组四极磁铁。
一旦电子被加速,它们就进入飞行管。飞行管可以通过连接管连接到波导管。该连接管或连接结构可以被称为漂移管。漂移管也形成真空管的一部分。RF波经由与漂移管联接的RF输出连接管道或管离开波导管。与将RF引入波导管的RF输入管道一样,RF离开波导管所通过的管道或管经由弯管接头或“T形”接头连接到真空管。RF经由密封真空系统的RF输出窗口从真空系统传出。
飞行管通过泵系统保持在真空条件下。电子沿着回旋路径朝向重金属靶行进。靶可以包括例如钨。在电子行进穿过飞行管的同时,聚焦磁铁的布置用于将束引导并聚焦在靶上。回旋路径允许减小LINAC的总长度,同时确保由具有小的能量散布的电子组成的加速电子束聚焦在靶上。
为了确保在电子束朝向靶行进时不阻碍电子的传播,使用包括真空泵130或真空泵的布置的真空系统抽空波导管104。泵系统能够在波导管104和飞行管中产生超高真空(Ultra-high Vacuum,UHV)条件。真空系统还确保电子枪中的UHV条件。电子可以被加速到接近被抽空波导管104中的光速的速度。电子枪106、波导管104和飞行管一起形成真空管,其中,电子可以在真空条件下被加速并被导向靶。在包括将波导管104连接到飞行管的漂移管的实现方式中,漂移管也形成真空管的一部分。真空管具有两个端。这些端可被描述为相对的端。电子枪106位于真空管的第一端,飞行管位于真空管的第二端。换言之,飞行管位于波导管104的远离电子枪106的端,因此位于真空管的远离电子枪106的端。
保持在真空下的部件的组合,例如真空管和任何连接管道和管(例如将RF输入和输出窗口耦合到真空管和泵的内部容积的那些连接管和管道),可以被称为真空系统。真空系统是密封的,并且恒定地保持在真空下。为了产生必要的高真空条件,在可以使用例如离子泵维持高品质真空之前,真空系统可能经历几个阶段的抽吸。例如,首先,可以使用普通的基于活塞的泵,接着是其中使用涡轮分子泵进一步降低真空系统内部的压力的阶段。最后,使用离子泵来确保系统保持在超低压。
当高能电子撞击靶时,在各个方向上产生X射线。该靶位于飞行管的内部,并且位于飞行管的端处以密封真空系统。飞行管还包括对X射线透明的靶窗口,该靶窗口被定位为允许当LINAC操作时产生的X射线从抽空的飞行管穿过靶窗口并进入治疗头110。此时,初级准直器阻挡在某些方向上行进的X射线,并且仅使向前行进的X射线通过,以产生锥形束。X射线被过滤,然后穿过一个或多个离子室以进行剂量测量。在束作为放射治疗的一部分进入患者中之前,可以通过束成形设备以各种方式对束进行成形,例如通过使用多叶准直器。
在一些实现方式中,LINAC被配置为发射X射线束或电子粒子束二者之一。这样的实现方式允许装置提供电子束治疗,即,一种将电子而不是X射线导向靶区域的外部束治疗。通过调节LINAC的部件,可以在发射X射线的第一模式与发射电子的第二模式之间“调换”。实质上,通过将重金属靶移入或移出电子束路径并用所谓的“电子窗口”代替它,可以在第一模式与第二模式之间调换。电子窗口对于电子基本上是透明的,并且允许电子离开飞行管。
飞行管的端可以由包括靶和电子窗口的部件密封。然后,通过移动飞行管使得电子束指向靶或电子窗口二者之一,可以在第一模式与第二模式之间调换。因此,将波导管连接到飞行管的起点的漂移管是稍微柔性的,以允许飞行管移动。换言之,当用户在使用电子和X射线能量之间变化时,飞行管将移动,这将钨靶(X射线)或电子窗口(电子)二者之一置于要治疗的位置。
LINAC装置还包括若干其他部件和系统。整个系统由水冷系统(图中未示出)冷却。水冷却系统可以特别地用于冷却波导管104、靶和射频源102。为了确保LINAC不泄漏辐射,还提供了适当的屏蔽。如本领域技术人员将理解的,用于放射治疗的LINAC装置将具有额外的设备,例如用于支撑和旋转LINAC的台架、患者支撑表面、以及被配置为控制LINAC设备的控制器或处理器。
台架被配置为使LINAC装置围绕患者旋转,使得辐射可以围绕患者从多个角度和/或方向被导向患者。LINAC装置可以包括传感器或感测设备,该传感器或感测设备被配置为提供指示台架已经旋转的程度的信号,从该程度可以导出台架角度值。
设备和传感器的细节
图2描绘了LINAC的真空管的横截面。如上所述,真空管由电子枪202、波导管204和飞行管206组成。电子枪202被配置为将电子注入到波导管204中。在该示例中,电子束可由聚焦磁铁的第一布置210及聚焦磁铁的第二布置215来聚焦。束由操纵磁铁的第一布置220和操纵磁铁的第二布置225“操纵”,即,引导。在LINAC处于使用中的同时,电子枪202、波导管204和飞行管206通过真空系统或合适的真空设备保持在高真空条件下。
LINAC还包括电流传感器235,例如安培计。电流传感器235可以包括在电子枪202内。电流传感器235适于检测并被配置为检测供应给电子枪的电流,即穿过阴极灯丝的电流。电流传感器235与装置控制器240通信地联接,并且与电子枪电流有关的数据被传送到装置控制器。供应给电子枪的电流由电流传感器测量,并以特定频率传送给装置控制器240,例如,电流传感器235可以每秒向装置控制器240提供电流测量。
LINAC还包括电压传感器237,例如伏特计。电压传感器237可以包括在电子枪202内。电压传感器237适于检测并被配置为检测施加到电子枪的电压,例如,跨阴极灯丝的电压。电压传感器237与装置控制器240通信地联接,并且与电子枪电压有关的数据被传送到装置控制器。供应给电子枪的电压由电压传感器237测量,并以特定频率传送给装置控制器240,例如,电压传感器237可以每秒向装置控制器240提供电流测量。
LINAC还包括台架(未描绘),该台架被配置为使LINAC装置围绕患者旋转,使得辐射可以围绕患者从多个角度和/或方向被导向患者。LINAC装置还包括台架旋转传感器或感测设备,该传感器或感测设备被配置为提供指示台架已经旋转的程度的信号,从该程度可以导出台架角度值。
在图2的示例中,真空系统包括耦合到真空管的任一端的两个泵。第一泵230耦合到的真空管的区域设置在真空管的与第二泵234耦合到的真空管的区域相对的端处。第一泵230与电子枪202所处的真空管的第一端联接。第一泵230可以与真空管的与电子枪相邻的区域(即与电子枪202将电子注入波导管204的位置相邻的区域)联接。第一泵230被布置和配置为从真空管去除气体分子,并且特别地被布置和配置为主要从真空管的第一区域去除气体分子。第一区域可以包括由电子枪占据的管的容积和/或真空管的靠近电子枪的区域。真空管的接近电子枪的区域可以描述为与电子枪相邻或靠近电子枪。第二泵234与真空管的第二区域联接,该第二区域位于飞行管206以及因此靶所处的真空管的第二端处。第二泵234可以与飞行管206本身联接。第二泵234被布置和配置为从真空管去除气体分子,并且特别地被布置和配置为主要从真空管的第二区域去除气体分子。第二区域可以包括飞行管206本身和/或真空管的接近飞行管206的区域。真空管的接近飞行管的区域可以描述为与飞行管相邻或靠近飞行管。例如,第二泵234可以在波导管204和飞行管206中间的连接区域中与真空管联接。
在实现方式中,枪泵连接到将射频波源与波导管接合的管或管道。该连接管或管道将RF引入到波导管,并在真空管的区域处经由弯管接头接合波导管。换言之,RF输入连接管道或管将RF输入窗口接合到波导管。通常,RF输入连接管道或管在波导管的与电子枪相邻的区域处接合波导管或与其联接。
在实现方式中,靶泵连接到RF离开波导管所通过的管或管道。该连接管或管道将波导管的区域与RF输出窗口联接。该RF输出连接管道在波导管的与飞行管(例如漂移管)相邻的区域处接合波导管或与其联接。RF输入管/管道和RF输出管/管经由弯管接头或“T形”接头与真空管联接。该实现方式在图7中描绘,图7描绘了定位于波导管(在图中仅能看到其一小部分)与飞行管706(在图中仅能看到其一小部分)之间的漂移管707。“弯管接头”705将漂移管707与RF输出连接管道709联接,该RF输出连接管道终止于RF输出窗口,RF可以通过该RF输出窗口离开真空系统。靶泵联接至弯管接头705与RF出口窗口(未示出)之间的RF出口连接管道的区域。因此,第二泵耦合到的真空管的区域可以被描述为与飞行管相邻或靠近飞行管和/或接近与飞行管联接的漂移管或与其相邻。
第一泵230可以被描述为定位为靠近或基本上靠近电子枪202,因此基本上靠近电子进入波导管204的位置。第二泵234可以定位为靠近或基本上靠近靶位于其中的飞行管206的入口。因此,第一泵230可被称为“枪泵”,第二泵234可被称为“靶泵”。
第一泵和第二泵用于在电子枪204、波导管206和飞行管206内部产生高真空条件,因此可以被描述为真空泵。合适的真空泵包括离子泵,例如二极管和贵二极管泵。离子泵能够在真空管的密封容积内部产生非常低的压力。也可使用能够提供UHV条件的其它泵,包括涡轮分子泵和扩散泵。
没有传感器位于真空管(即波导管和飞行管)本身内部,因为在这些部件内部只有非常小的空间可以装配这种传感器。而且,放置在波导管内部的任何部件将影响波导管内部的电磁场,这可能对波导管内部的电子的加速具有负面影响。进一步地,在电子穿过的区域处放置在真空管内部的部件易受许多感应辐射的影响,这将是不期望的。最后,如果放置在真空管内部的任何传感器出现故障,则更换它将非常困难。
然而,可以从由真空泵自身提供的读数获得真空管内部的压力的指示。来自泵的读数可用于给出真空管内部的真空质量的指示。第一泵230包括第一传感器232,该第一传感器适于提供并且被配置为提供指示真空管内部的压力的信号。由于第一真空泵230与真空管的基本上靠近电子枪202的部分联接,因此第一传感器232能够提供指示接近电子枪232的真空管内部的压力的信号。因此,第一传感器232信号可被称为“枪真空”信号或枪真空值。
因此,从广义上讲,第一传感器被配置为提供指示真空管内部的第一区域处的压力的信号,并且第二传感器被配置为提供指示真空管内部的第二区域处的压力的信号。第一区域和第二区域位于真空管的相对端处。换言之,第一区域比第二区域更靠近真空管的第一端,由此断定,第二区域比第一区域更靠近真空管的第二端。
以与第一泵230和第一传感器232类似的方式,第二真空泵234包括第二传感器236,该第二传感器适于提供并配置为提供指示真空管内部的压力的信号。更具体地,第二传感器206被配置为提供指示接近靶和/或飞行管206的真空管内部的压力的信号。因此,来自第二传感器236的信号可被称为“靶真空”信号或靶真空值。更一般地,由真空泵经由它们各自的传感器提供的信号可以被称为压力信号。传感器测量第一泵和第二泵内部的相应区域的压力,即真空水平。这些区域是由真空管限定的同一封闭容积的一部分,因此,第一传感器能够提供指示第一泵耦合到的真空管的第一端处的压力的信号,并且第二传感器能够提供指示第二泵耦合到的真空管的第二端处的压力的信号。
更一般地,第一传感器232和第二传感器236被配置为提供信号,从这些信号可以导出压力值,该压力值指示真空管内部的压力。压力值可以基于来自第一传感器232和第二传感器236中的任一个或两个的信号。
传感器可以包括任何数量的适于测量真空压力的可能的传感器。可以形成真空泵的一部分并且可以用于提供指示压力的信号的示例传感器包括皮拉尼规和电离规。在离子泵控制单元(Ion Pump Control Unit,IPCU)处测量枪和靶端处的真空压力。
电流传感器235以及第一泵和第二泵230、234还包括与装置控制器240通信的装置。例如,电流传感器和泵可以包括合适的处理电路和发送天线。电流传感器和泵被电子地和/或通信地耦合到装置控制器240。装置控制器240随着电流传感器生成或产生信号而从电流传感器和泵接收信号。装置控制器240电子地和/或通信地耦合到装置控制器存储器245。装置控制器240和装置控制器存储器245可以被配置为存储由电流传感器和泵生成的信号。从电流传感器和泵生成的信号包括传感器数据。
装置控制器240例如经由网络250通信地耦合到中央控制器270。装置控制器240被配置为向中央控制器270传输(即发送)传感器数据以存储在中央控制器存储器275上。中央控制器存储器275可以包括多个不同的服务器作为云存储解决方案的一部分。中央控制器可以经由网络250通信地耦合到多个放射治疗装置,各个放射治疗装置被配置为向中央控制器270传输信号以存储在中央存储器275上。中央控制器270适于并被配置为处理所接收的信号并将它们存储在数据库中。处理信号可以包括:例如计算和存储特定传感器数据的日平均值。
放射治疗装置具有各种传感器,来自传感器的信号/读数被传送到装置控制器240。信号可以存储在装置控制器存储器245中和/或可以经由网络传送到中央控制器270。数据可以在其生成时被上传到中央控制器270,或者可以存储在装置控制器存储器245上以便例如定期作为批量上传被上传。替代性地,数据可以由装置控制器240连续地收集,例如,传感器信号可以每4秒(可选地在装置不递送辐射时)被采样,并且如果数据示出与先前上传的数据点的特定差异,则上传数据。在具体的实现方式中,数据点在存在+/-0.04的变化时上传,并且装置控制器可选地在装置不递送辐射时每4秒一次地查找新数据项,并且在LINAC递送辐射时每秒一次地查找新数据项。
数据存储在中央存储器275上的数据库中,可以包括来自传感器的数据,例如,数据包括如由来自电流传感器235的信号表示的电流值和如由来自第一传感器232和/或第二传感器236的信号表示的压力值、电子枪已经在辐射模式中花费的时间量、如由来自台架旋转传感器或感测设备的信号表示的台架的旋转程度、是否在特定时间递送辐射以及如由剂量计或监测室指示的剂量率和机器输出、以及水冷却系统周围的各个点处的水温。这些类型的数据被给出以提供示例,并且本领域技术人员将理解,现代LINAC装置可被配置为从大量传感器生成大量数据。
存储在中央存储器275上的数据库中的数据还可以包括电子枪处于辐射模式的总时间量的记录。对于特定的电子枪,可以编译所接收的与电子枪在辐射模式下所花费的时间量有关的数据,以提供电子枪在辐射模式下的总时间量的记录。
装置控制器240和中央控制器270也都通信地耦合到远程控制器240。远程控制器260可以通过数据库250并利用合适的软件平台访问中央数据库,该数据库存储关于多个放射治疗装置的信息和数据。远程控制器260还可以访问装置控制器240以获得关于特定放射治疗机的实时信息。
装置控制器、中央控制器和远程控制器可以各自被描述为处理器、计算机或计算装置。控制器可以连接到彼此(例如,联网)和/或连接到局域网(Local Area Network,LAN)、内联网、外联网或因特网中的其它机器。控制器可以各自在客户端-服务器网络环境中以服务器或客户端机器的能力操作,或者在对等(或分布式)网络环境中作为对等机器操作。控制器可以各自是个人计算机(Personal Computer,PC)、平板计算机、机顶盒(Set-TopBox,STB)、个人数字助理(Personal Digital Assistant,PDA)、蜂窝电话、网络电器、服务器、网络路由器、交换机或网桥、或者能够执行一组指令(顺序的或以其他方式的)的任何机器,该组指令指定要由该机器采取的动作。进一步地,例示了相应的控制器,术语“控制器”还应被采取为包括单独地或联合地执行一组(或多组)指令以执行本文所讨论的方法中的任何一个或多个的机器(例如,计算机)的任何集合。
本公开的方法可以在装置控制器存储器和远程控制器存储器中的一个或多个上或者任何其他计算机可读介质上具体实施。该介质可以是非瞬态计算机可读介质。计算机可读介质承载计算机可读指令,这些计算机可读指令被布置为在处理器上执行,以便使控制器/处理器进行本文描述的任何或所有方法。如本文所使用的术语“计算机可读介质”是指存储用于使处理器以特定方式操作的数据和/或指令的任何介质。这种存储介质可以包括非易失性介质和/或易失性介质。非易失性介质可以包括例如光盘或磁盘。易失性介质可以包括动态存储器。存储介质的示例性形式包括软盘、软磁盘、硬盘、固态驱动器、磁带或任何其它磁性数据存储介质、CD-ROM、任何其它光学数据存储介质、具有一个或多个孔的图案的任何物理介质、RAM、PROM、EPROM、闪速EPROM、NVRAM以及任何其它存储芯片或匣。
在LINAC装置中,通常期望对于特定的治疗辐射能量实现最高可能的剂量率。决定治疗辐射能量的最重要因素是电子可以被波导管加速的程度,这取决于输入到波导管中的RF能量。特定辐射能量的剂量率取决于从重金属靶发射的x射线的数量,而x射线的数量又取决于撞击靶的电子的数量。一般而言,增加供应给电子枪的电流增加从电子枪阴极发射的电子的数量。因此,增加电子枪电流增加了进入波导管的电子的数量。然而,对于给定的辐射能量,连续增加电子枪电流导致剂量率的连续增加不是这种情况。这是由于波导管的特性和加速电子穿过波导管的RF能量。实际上,对于给定的辐射能量,即对于包括辐射的x射线的给定能量,存在导致该辐射能量的最高可能剂量率的最佳电子枪电流。因此,枪电流被设置为使得LINAC将产生对于该能量可实现的最高剂量率。
各个LINAC装置被配置为以若干可能能量中的一种产生辐射。这些能量中的每一个都具有相关联的最佳枪电流值。用于最低配置能量的最佳枪电流值在本文中可以被称为XLOW枪电流。以示例的方式,全新的LINAC机器可以具有最低可能的6MV的能量,对应的XLOW枪电流为7.95A。以替代示例的方式,具有4MV的最低配置能量的LINAC装置可以具有7.85A的XLOW枪电流。各种可能的辐射能量及其对应的校准的最佳电子枪电流被保存在装置控制器存储器245中,使得当期望改变辐射能量时,例如在治疗过程期间,或在不同患者的治疗之间,可以相应地调整施加到电子枪202的电流,以确保实现最高可能的剂量率。在示例中,每个能量具有其自己的校准块,使得一旦电流已经被优化,则电流被保存并且当在能量之间改变时可以被再次加载。
工程师例如通过在保存引起如例如由放射治疗装置剂量计确定的最高剂量的枪电流值之前对枪电流进行0.01A的调节,来找到特定能量处的最佳枪电流峰值。电子枪电流可以以这种方式针对各个装置能量定期(例如按月)校准。
LINAC机器的剂量率或束能量例如通过使用来自LINAC的治疗头中的电离室的信号来监测。在示例中,可以通过监测所谓的驼峰误差值来监测束的能量和剂量率。驼峰是束中心与束边缘之间的束形状差异的量度,并且是辐射束的能量的指示。可以通过根据已知方法比较来自电离室的中心区域的信号与来自电离室的外部区域的信号来计算驼峰值。
所谓的“互锁值”可以应用于测量的剂量率和/或束能量。如果所测量的剂量率或束能量与预期剂量率或束能量之间的差大于互锁值,那么LINAC机器经历安全超控,并将停止操作以确保患者安全。然后,直到问题被修复或者直到被授权的人清除安全超控并授权机器继续使用,机器才可以被再次启动。在示例中,驼峰值具有5.0%的互锁值;即,如果所测量的驼峰值与预期驼峰值的差大于5.0%,那么LINAC机器执行安全超控。非0.0的任何驼峰误差值指示束能量已经从先前的最优设置稍微改变,并且这一点最可能的原因是枪电流是“非峰值”,即供应给电子枪阴极的电流不是最佳的。最佳的枪电流可以在几天或几周的量级上稍微改变。
因此,尽管最佳枪电流由现场维修工程师定期校准并保存在装置控制器存储器245中以便与相关联的LINAC能量一起使用直到下一次校准为止,但是供应给电子枪202的实际电流由伺服机构或其它反馈系统调节。伺服机构使用如存储在装置控制器存储器245中的最佳枪电流设置作为基本电流,但是然后使用与从剂量测定系统获得的剂量率有关的反馈,例如驼峰误差,以在辐射装置操作的同时对电子枪电流进行微小调节。
在一些实现方式中,例如,伺服机构将自动调节枪电流以将枪差值减小到0。枪差值基于驼峰误差,即驼峰外部值与驼峰内部值之间的差。伺服机构由现场维修工程师设置的剂量水平数据项来调节。
电流传感器可以包括任何数量的可能的传感器,这些传感器适于测量通过阴极灯丝的电流和跨阴极灯丝的电压。阴极灯丝电流和电压通过形成电子枪的一部分的适当的传感器和电路来测量。应当理解,电流传感器是被配置为提供信号或值的传感器,该信号或值指示供应给阴极的灯丝的电流。因此,电流传感器可以包括测量灯丝的电阻和/或跨灯丝的电压的传感器、以及使用查找表或其他校准数据以便基于由电流传感器提供的信号或值来提供电流值的合适的处理器和存储器。
目前已经观察到,对于特定LINAC能量的最佳枪电流随着阴极灯丝老化和劣化而随时间减小。这包括最佳的XLOW电流。这可能是因为,随着电子枪中的阴极灯丝在其寿命期间劣化,需要较少的电流来实现一定的电子输出。换言之,随着阴极劣化,灯丝变得“更弱”,因此灯丝的电阻减小。因此,在特定LINAC能量下对于最大剂量率跨灯丝所需的电流减小。这可以在图3的曲线图中看到。
图3示出了使用来自如由放射治疗装置上的传感器(例如图2中描绘的电流传感器)提供的传感器值的数据库的数据而生成的曲线图。该曲线图示出了沿着X轴的时间、沿着左y轴的以安培为单位的电流以及沿着右y轴的以任意单位的压力。
该曲线图演示了可以从装置控制器接收并且可以由远程控制器访问的信号的类型。特别地,曲线图示出了平均XLOW枪电流随时间的总体减小。电流值是供应给电子枪的实际XLOW电流的日平均值。供应给电子枪的实际电流由存储在装置控制器存储器245和伺服机构/反馈系统中的最佳枪电流值确定。日平均值基于由电流传感器提供的信号计算,该电流传感器或者是如上所述的电子枪的一部分,或者替代性地是伺服机构的一部分。
日电流平均值基于用于XLOW的枪电流的平均值。枪电流将随着放射治疗装置递送辐射而波动。随着递送辐射,电子枪伺服机构监测例如灯丝中的电阻变化。然而,它不能确切地跟踪这一点,因此随着枪偏离其最佳值,剂量将开始降低。例如,在一些实现方式中,由于内置的安全阈值,伺服机构不能偏离校准的最佳值太大的程度。一旦剂量率已经从低剂量互锁(校准的最大剂量率)移开一定程度或量,例如当剂量率是校准的最佳剂量率的80%时,则放射治疗装置将经历安全中断,即,将终止治疗并发出通知或警报,该通知或警报指示由于递送的剂量率已经下降为远低于最大值而停止治疗以保证患者安全。随着枪电流进一步漂移到峰值之外、即远离最佳值,这些中断和警报的频率将增加。在现有方法中,依靠这些中断和警报的存在或增加的频率来警告现场工程师应当安排电子枪进行修理或更换。
右y轴的单位是半任意单位,该单位从来自泵传感器的真空压力读数导出。对于特定的离子泵,离子泵的电压与由泵吸收的电流的log10有关,如下:
V
在实现方式中,然后转换记录在离子泵控制单元(IPCU)上的真空压力,以给出-4.49与-6.8之间的值,其中,-4.49涉及1.55E-04mBar的真空压力,而-6.8为5.60E-08mBar。因此,读数-5.50为4.64E-06mBar。
图6示出了使用来自如由传感器(例如图2中描绘的传感器232、236)提供的传感器值的数据库的数据生成的曲线图。曲线图示出了沿着X轴的时间和沿着Y轴的压力。y轴的单位是半任意单位,该单位从来自各个泵传感器的真空压力读数导出。对于特定的离子泵,离子泵的电压与由泵吸收的电流的log10有关,如下:
V
在实现方式中,然后转换记录在离子泵控制单元(IPCU)上的真空压力,以给出-4.49与-6.8之间的值,其中,-4.49涉及1.55E-04mBar的真空压力,而-6.8为5.60E-08mBar。因此,读数-5.50为4.64E-06mBar。
曲线图示出了从靶真空泵接收的如由靶真空传感器生成的信号。该曲线图演示了可以从装置控制器接收并且可以由远程控制器访问的信号的类型。对于枪泵可以生成类似的曲线图。通常在曲线图上最上面的线是靶泵日最大读数。各个数据点是特定日的最大值,即,从00:00到23:59的时段之间的特定数据的最大值。通常在曲线图上最下面的线是靶泵日最小读数,其中各个数据点是该日的最小值。最后,通常在最大线与最小线之间的线是日平均线。该线上的各个数据点是特定日的平均靶泵值。
具体方法
现在参考图4的流程图中描绘的方法。在步骤410处,接收电流值。电流值从来自电流传感器的信号导出。如上所述,对于特定的辐射能量存在最佳的枪电流值,然而,当施加辐射束时,并且因为供应给电子枪的电流由伺服机构控制,所以供应给电子枪的实际电流可以在该最佳值附近稍微变化。因此,由电流传感器235测量并由装置控制器240接收的电流随着LINAC操作而变化。在步骤410处接收的电流值可以是在一段时间内从电流传感器接收的信号或值的平均值。换言之,电流值可以是在该时间段内供应给电子枪的平均电流。优选地,该时间段是一天,使得电流值是供应给电子枪的电流的日平均值。方法还可以包括:通过计算或以其他方式确定在该时间段内从电流传感器235接收的信号的平均值来导出电流值。
在步骤420处,处理电流值。关于图5更详细地描述了电流值的处理,但是在优选实施例中,电流值的处理包括:确定电流值是否满足至少一个阈值准则,以及确定电流值是否在特定时间段中已经改变了阈值量或更多。
在步骤430处,基于电流值的处理,确定是否应当安排电子枪的修理或更换。在示例中,如果上述步骤420处的确定是肯定的,即如果电流值满足至少一个阈值准则并且电流值在特定时间段内已经改变了至少阈值量,则确定应当安排修理或更换。
以步骤410、420和430的具体示例的方式,在装置控制器240处从电流传感器235接收与供应给阴极灯丝的电流有关的信号,并且将这些信号传送到中央控制器270以存储在中央存储器275中。中央控制器270通过基于所接收的电流值计算或确定日平均值来接收电流的日平均值。然后处理电流的日平均值;特别地,确定特定辐射能量的平均电流(例如,XLOW枪电流)是否低于6.90A。作为平均电流值处理的一部分,还确定平均XLOW枪电流在过去的30天内是否减少了0.05A或更多。基于平均电流值的处理,确定是否应当安排电子枪的修理或更换。例如,如果上述确定是肯定的,则确定应当修理或更换电子枪。
在步骤440处,输出步骤430处的是否应当安排修理或更换的确定。这个步骤是可选的。输出确定可以包括:在显示屏上显示确定的指示。响应于该指示,可以在下一个可用的维修点或者在机器所有者方便的时间(例如在计划的机器停机时间期间)安排电子枪的修理或更换。输出确定还可以包括:向现场维修工程师发出详述确定的警报或通知。该警报可以包括关于如何测试电子枪的故障的信息,并且还可以包括详述如何更换电子枪或者如何例如通过更换阴极灯丝来修复电子枪的信息。输出确定还可以包括:发出通信、警报或以其他方式联系放射治疗装置的所有者,以便将该问题通知给他们并且安排修理或更换。
在示例中,一旦已经满足本文描述的并且在图5的流程图中阐述的预测准则,则生成报告并且发出警报。然后,将该警报发送到相关的维修团队,并且他们将通常在接下来的3-6周内计划更换,或者与计划的维护活动对齐。
在优选实施例中,装置控制器240从电流传感器接收信号并将它们传输到远程控制器260。中央控制器270接收信号,然后例如通过从在一段时间内的信号计算平均电流值来导出电流值。将平均电流值存储在中央控制器存储器270上。然后,当远程控制器260经由网络250访问中央存储器275时,对电流值进行处理。然而,图4中显示的至少一些步骤,并且在一些示例中是所有步骤,可以在装置控制器240上执行。应当理解,装置控制器240、中央控制器270和远程控制器260的任何组合可以用于执行所公开的方法。
现在参考图5的流程图。该流程图更详细地示出了步骤420、430和可选步骤440,并且特别地更详细地示出了电流值的处理。在步骤510处,确定所接收的或所导出的电流值是否满足第一阈值准则。在特定示例中,检查是否满足第一准则包括:确定电流值(例如特定日的平均XLOW枪电流值)低于第一阈值,例如第一阈值平均电流值。如果是,则满足准则。在特定示例中,确定平均XLOW枪电流是否低于6.90A。
如果电流值满足第一阈值准则,那么过程进行到步骤520。在步骤520处,确定电流值在特定时间段内是否已经改变了至少第一阈值量。第一阈值量可以被描述为第一特定量。在特定示例中,第一阈值量是0.05A,并且特定时间段是30天,使得确定平均XLOW枪电流在最近30天中是否已经减小了0.05A或更多。如果是,则满足准则。
如果电流值在该时间段内改变了阈值量,那么在步骤530处确定应当安排电子枪进行修理或更换。可以以与步骤440处的输出类似的方式在步骤540处输出该确定。
如果在步骤520或步骤560处确定电流值在特定时间段内尚未适当地改变第一或第二阈值量,那么不满足更换/修理准则,并且在步骤570处确定不应修理或更换电子枪。
如果在步骤510处确定电流值不满足第一阈值准则,例如,XLOW电子枪电流的日平均值不小于6.90A,那么在步骤550处确定电流值是否满足第二阈值准则。在示例中,检查或确定是否满足第二阈值准则可以包括:确定电流值是否低于第二阈值,例如第二平均电流值。在特定示例中,检查满足第二阈值准则包括:确定电流值(例如特定日的平均XLOW枪电流值)低于第二阈值。在特定示例中,确定平均XLOW枪电流是否低于7.20A。
步骤550可以替代性地或另外地包括:确定电流值在阈值范围内,其中,阈值范围由上范围值和下范围值限定。下范围值可以等于第一阈值。例如,在步骤550处可以确定特定日的平均XLOW枪电流是否在6.90安培与7.20安培之间。
如果电流值满足第二阈值准则,那么过程进行到步骤560。在步骤560处,确定电流值在特定时间段内是否已经改变了至少第二阈值量。第二阈值量可以被描述为第二特定量。在特定示例中,第二阈值量是0.10A,并且特定时间段是30天,使得确定平均XLOW枪电流在最近30天中是否已经减小了0.10A或更多。
如果电流值在该时间段内改变了第二阈值量,那么在步骤530处确定应当安排电子枪进行修理或更换。可以以与步骤440处的输出类似的方式在步骤540处输出该确定。
本发明人已经注意到,当LINAC中的电子枪达到其使用寿命的终点时,最佳电流的变化率增加。换言之,为了尝试获得最佳剂量率而对于特定的LINAC能量必须供应给阴极灯丝的电流随着电子枪达到其寿命终点而更快地降低。使用与电流值在一段时间内是否改变了特定量有关的阈值(即与电流值的变化率有关的阈值)允许考虑校准误差,并确保仅标记正加速故障的装置以进行修理或更换。已经注意到,以非常低的枪电流操作的装置仍然能够在可接受的操作参数内操作,例如能够提供可接受的剂量率。使用与枪电流的变化率有关的阈值有助于确保不引起不必要的维修探访和/或修理和更换。
在某些实现方式中,步骤510处的第一阈值是比步骤550处的第二阈值低的阈值。与此结合,步骤520处的第一阈值量小于步骤560处的第二阈值量。这些因素一起意味着具有较低电流值的电子枪需要满足较低电流“速率”准则,以便被分类为应当被修理或确定的电子枪,该较低电流值本身指示灯丝已经劣化到较大程度。
在特定示例中,确定是否满足第一准则包括检查XLOW电子枪电流小于6.90A,并且确定是否满足第二准则包括检查XLOW电子枪电流小于7.2A。参考图3的曲线图,在2017年8月1日,对于包括LINAC和电子枪的特定放射治疗装置,遵循图4和图5的流程图中详述的过程。参考该曲线图,2017年8月1日的电流值为约7.31A。因此,在步骤510、550中,第一或第二阈值准则都不满足,并且在步骤570中确定电子枪不需要安排修理或更换。
2017年11月1日遵循相同的过程,在该日期,电流值为7.19A。在该场景中,7.19A大于6.90A,因此不满足步骤510处的第一阈值准则。然而,电流值低于7.2A,因此在步骤550处满足第二阈值准则。然而,在回顾前30天(在该示例中,是相关的特定时间段)的电流值时,确定电流值没有改变0.10A的第二阈值量。因此,在步骤570处确定电子枪不需要更换。
2018年8月1日遵循相同的过程。枪电流值为6.87A,因此在步骤510处,枪电流值不满足第一阈值准则。在回顾前30天的数据时,在步骤520处确定该值已经改变了至少第一阈值量0.05A,因此电子枪应当被安排修理或更换。在该确定之后,发出警报和/或向相关修理团队发送消息以要求他们安排对包括电子枪的放射治疗装置的实地探访。团队能够确定电子枪是否需要修理或更换二者之一。
本公开的方法可以定期执行,例如每天执行,以便连续地监测放射治疗装置的电子枪是否应当修理或更换,或者至少安排修理或更换。
应当理解,虽然在图5中阐述了特定顺序的步骤,但是这些步骤可以以不同的顺序执行。
应当理解,尽管参考了XLOW电流,即,对于LINAC的最低配置能量供应给阴极的电流,但是可以使用LINAC以任何特定能量操作时的电流。对于申请人制造的机器,在85%的机器中,XLOW通常为6Mv,并且6MV比任何其它能量使用得更多。事实上,所有临床应用的约85%是使用6MV。因此,使用处于XLOW能量的电流的优点在于,这是LINAC机器最多使用的能量,因此,监测处于该能量的电流将产生最多的数据项以供分析。
现在参考图8a和图8b的流程图中描绘的方法。该方法通过分析各种参数来识别放射治疗装置的电子枪是否由于真空问题而具有较差的枪寿命。
在步骤810处,以与上述步骤410类似的方式接收电流值。电流值从来自电流传感器的信号导出。如上所述,对于特定的辐射能量存在最佳的枪电流值,然而,当施加辐射束时,并且因为供应给电子枪的电流由伺服机构控制,所以供应给电子枪的实际电流可以在该最佳值附近稍微变化。因此,由电流传感器235测量并由装置控制器240接收的电流随着LINAC操作而变化。在步骤810处接收的电流值可以是在一段时间内从电流传感器接收的信号或值的平均值。换言之,电流值可以是在该时间段内供应给电子枪的平均电流。优选地,该时间段是一天,使得电流值是供应给电子枪的电流的日平均值。方法还可以包括:通过计算或以其他方式确定在该时间段内从电流传感器235接收的信号的平均值来导出电流值。
在步骤820处,处理电流值。在优选实施例中,电流值的处理包括:确定电流值是否满足至少一个第一阈值准则。可选地,这包括:确定电流值已经下降到阈值电流值以下,例如7.35A以下。
超过该第一阈值准则可以给出电子枪潜在地处于其寿命的大约60%的警告。该阈值准则还可以在电子枪的潜在故障之前给出大约三个月的警告,这允许维修活动与计划的维护活动对齐,并且还允许有时间准备例如离子泵的所需的另外零件或设备。
以步骤810和820的具体示例的方式,在装置控制器240处从电流传感器235接收与供应给阴极灯丝的电流有关的信号,并且将这些信号传送到中央控制器270以存储在中央存储器275中。中央控制器270通过基于所接收的电流值计算或确定日平均值来接收电流的日平均值。然后处理电流的日平均值;特别地,确定特定辐射能量的平均电流(例如,XLOW枪电流)是否低于7.35A。
在步骤830处,确定电子枪处于辐射模式的总时间量是否满足至少第二阈值准则。该确定可以通过访问存储在中央存储器275上的数据库中的数据来进行,该数据包括电子枪处于辐射模式的总时间量的记录。替代性地,当与电子枪处于辐射模式的总时间量有关的数据存储在装置控制器存储器或远程控制器存储器中的任一个或两个处时,可以访问这些位置中的至少一个,以获得该数据。在优选实施例中,确定电子枪处于辐射模式的总时间量小于阈值时间段,可选地,其中,该时间段为600小时。
满足第二阈值准则可指示电子枪的枪寿命比预期的短,特别是当结合第一阈值准则考虑时。如果第一准则和第二准则都满足,则指示电子枪比预期的更早劣化。这可以指示真空管的真空问题。
在可选步骤840处,接收压力值。压力值基于从与第一泵和第二泵230、234相关联的第一传感器和第二传感器232、236中的至少一个接收的信号。如本文别处详述的,第一传感器和第二传感器被配置为提供指示真空管内部的压力的信号。更具体地,第一传感器被配置为提供指示接近电子枪的真空管内部的压力的信号,并且第二传感器被配置为提供指示接近飞行管和/或靶的真空管内部的压力的信号。第一信号是可处理的以提供指示真空管的第一端处的压力的第一值,并且第二信号是可处理的以提供指示真空管的第二端处的压力的第二值。第一值以本文公开的任何方式从来自第一传感器的信号导出。类似地,第二值以本文公开的任何方式从来自第二传感器的信号导出。
信号在装置控制器和远程控制器中的一个或多个处接收。例如,信号可以在装置控制器处接收并且存储在装置控制器存储器中作为从该特定放射治疗机接收的信号的数据库/日志的一部分。
信号也可以在远程控制器处接收并且存储在远程控制器存储器中作为数据库的一部分。远程控制器和存储器被配置为分别访问和存储来自经由网络连接到远程控制器的多个放射治疗机的数据。所接收的信号可以采取各种形式。例如,信号可以定期地从第一传感器和第二传感器中的任一个或两个接收。在该示例中,第一泵定期地(例如每4秒)将来自第一传感器的读数传送到装置控制器,并且第二泵将来自第二传感器的读数传送到装置控制器。
在步骤840处接收的压力值可以是在一段时间内从第一传感器和第二传感器中的任一个或两个接收的信号的平均值。换言之,压力值可以是在该时间段内真空管中的平均压力。优选地,该时间段是一周,使得压力值是真空管中的压力的周平均值。该方法还可以包括:通过计算或以其他方式确定在该时间段内从第一传感器和第二传感器中的任一个或两个接收的信号的平均值来导出压力值。
在可选步骤850处,处理压力值。在优选实施例中,压力值的处理包括:确定压力值是否满足至少一个第三阈值准则。可选地,这包括:确定压力值已经下降到阈值压力值以下,例如-6.15(5.03E-07mBar)以下。
超过该阈值暗示真空系统的性能不如它应当的那样好,这是由于清洁度、真空泄漏或性能差的泵。概括地,其表明真空质量是枪寿命短的可能原因。
可以针对装置的压力值历史来回顾针对任何特定放射治疗装置获得的压力值。例如,如果“机器A”在2019年8月中具有-6.14(5.19E-07mBar)的真空,则检查完全真空历史揭示在2017年8月中,压力值被记录为-6.35(2.54E-07mBar)。因此,该机器能够具有更好的真空,因此应当进一步研究改善真空的可能性。如果所获得的值与历史值相同,则可以指示将花费更长的维修活动来清洁/净化真空系统。
通过分析装置的压力值的历史,可以考虑压力值的任何季节性变化,其中,在冬季月份记录较好的压力值,而在夏季月份记录较差的值。真空系统往往在寒冷条件下工作得更好,因为污染物不太可能被打扰。通常,主要污染物将是水蒸气。这在较高温度下受到打扰,而在低温下反应性较低。当束第一次被开启并且RF沿着波导管向下发送时,污染物也会作出反应,这可能在正常化之前引起真空尖峰。
在步骤860处,至少基于电流值的处理,确定是否应当安排放射治疗装置的维护。在示例中,如果上述步骤820和830(以及可选地850)处的确定是肯定的,即如果电流值满足至少一个阈值准则并且电子枪处于辐射模式的总时间量满足至少第二阈值准则(并且可选地压力值满足至少一个第三阈值准则),则确定应当安排放射治疗装置的维护。
在步骤870处,输出步骤860处的是否应当安排放射治疗装置的维护的确定。这个步骤是可选的。输出确定可以包括:在显示屏上显示确定的指示。响应于该指示,可以在下一个可用的维修点或者在机器所有者方便的时间(例如在计划的机器停机时间期间)安排放射治疗装置的维护。输出确定还可以包括:向现场维修工程师发出详述确定的警报或通知。
警报可以包括关于如何针对在电子枪的先前更换之后引入的真空泄漏或由于频繁的枪改变和很少的调节时间而导致的污染来测试放射治疗装置的信息。警报还可以包括如何修复真空泄漏或如何执行烘烤过程以修复污染问题。输出确定还可以包括:发出通信、警报或以其他方式联系放射治疗装置的所有者,以便将该问题通知给他们并且安排放射治疗装置的维护。
在示例中,污染可以通过以下方式来检测:识别压力值在第一值(例如,-6.09或6.07E-07mBar)处开始,然后在放射治疗装置已经变热之后检测到下降到较低的第二值(例如,-5.93或1.07E-06mBar),变热这由升高的水温指示。然后,电子枪开始以辐射模式操作,真空进一步劣化,并继续劣化直到压力值被检测为降落在甚至更低的第三值(例如-5.81或1.60E-06mBar)。这种行为是污染的指示,因为真空性能随着温度升高而劣化。
在示例中,可以通过识别压力值开始于第一值(例如-5.90或1.17E-06mBar)来检测真空泄漏。一旦放射治疗装置已经变热并且电子枪已经开始在辐射模式下操作,则检测到满足阈值的真空变化(例如,该变化超过压力值的某一最小降低,该降低可以是例如0.10的变化),并且这指示真空泄漏。如果第一值为-5.90(1.17E-06mBar),并且在机器已经完成辐射模式下的第一操作之后,如果检测到压力值在-5.80(1.65E-06mBar)到-5.90(1.17E-06mBar)之间,则这可以指示真空泄漏。此时真空压力值应检测为小于-5.80(1.65E-06mBar)。这可能是真空泄漏和污染或更严重的污染的组合。
在示例中,一旦已经满足本文描述的并且在图8a和图8b的流程图中阐述的准则,则生成报告并且发出警报。然后,将该警报发送到相关维修团队,并且他们将计划放射治疗装置的维护。
在优选实施例中,装置控制器240从电流传感器以及第一传感器和第二传感器中的一个或两个接收信号并将它们传输到远程控制器260。中央控制器270接收信号,然后例如通过从在一段时间内的信号计算平均电流值来导出电流值,并且例如通过从一段时间内的信号计算平均压力值来导出压力值。将平均电流值和平均压力值存储在中央控制器存储器270上。然后,当远程控制器260经由网络250访问中央存储器275时,对电流值和压力值进行处理。然而,图8a和图8b中显示的至少一些步骤,并且在一些示例中是所有步骤,可以在装置控制器240上执行。应当理解,装置控制器240、中央控制器270和远程控制器260的任何组合可以用于执行所公开的方法。
现在参考图9a和图9b的流程图中描绘的方法。方法可以从可选步骤910或步骤920开始。在可选步骤910处,接收放射治疗装置中的故障的通知。放射治疗装置可以是LINAC装置。通知可以指示放射治疗装置已经开始在其正常操作参数之外操作。通知的生成将关于图10进行更详细的描述。当一个或多个条件被满足时,通知可以被触发。可能导致发出故障通知的可能条件可以是确定所接收的电流值和/或所接收的第二电压值分别满足第三阈值和第四阈值。
在步骤920处,接收台架旋转期间的电压值。该步骤可以响应于在步骤310处接收到故障通知而进行,或者可以以其他方式进行以便开始确定故障性质的过程。例如,可以响应于操作员意识到放射治疗机具有故障而手动开始该过程。优选地,在台架旋转期间,在电子枪处于非激活或待机模式的同时,在台架旋转中的各个点取得一系列电压值。这样,随后可以如下识别跨台架旋转的所接收电压值的任何变化。
在台架的旋转期间从电压传感器237接收信号。如本文别处详述的,电压传感器237被配置为提供指示施加到电子枪的电压的信号。信号是可处理的,以提供指示在台架旋转期间的各个时间点施加到电子枪的电压的电压值。电压值以本文公开的任何方式从来自电压传感器的信号导出。
信号在装置控制器和远程控制器中的一个或多个处接收。例如,信号可以在装置控制器处接收并且存储在装置控制器存储器中作为从该特定放射治疗机接收的信号的数据库/日志的一部分。装置控制器存储器还存储由装置控制器识别的任何故障的记录。
信号也可以在远程控制器处接收并且存储在远程控制器存储器中作为数据库的一部分。远程控制器和存储器被配置为分别访问和存储来自经由网络连接到远程控制器的多个放射治疗机的数据。所接收的信号可以采取各种形式。例如,信号可以定期地从电压传感器接收。在该示例中,电压传感器定期地(例如在台架旋转期间每4秒)将信号传送到装置控制器。
在步骤930处,处理电压值。在优选实施例中,电压值的处理包括:确定电压值是否满足至少一个第一阈值准则。可选地,这包括:确定电压值在台架的旋转期间是否变化了至少阈值量,例如变化了0.2V。可选地,这包括:确定电压值是否变化了0.05V的至少阈值量。电压值的该变化指示由于重力对松动部件的影响而导致的电子枪的一个或多个部件在台架旋转期间的移动。例如,电子枪阴极的松动载体可能导致电压值的变化。还可能存在枪体上的松动连接或枪隔离变压器的问题,这些问题引起所确定的电压变化。
超过第一阈值表明电子枪阴极的灯丝的电阻在台架旋转期间变化,变化越高,机器在临床治疗期间越可能不稳定。
在可选步骤940处,处理电压值,这次以通过确定电压值是否满足至少一个第二阈值准则来确定电子枪在台架旋转期间是否处于待机模式。可选地,这包括:确定电压值是否小于第一阈值电压值,例如15V。
在可选步骤950处,对于各个接收的电压值接收从由台架旋转传感器提供的信号导出的台架角度值。
信号从台架旋转传感器接收。如本文别处详述的,台架旋转传感器被配置为提供指示台架已旋转的程度的信号。信号是可处理的,以提供指示台架已旋转的程度的台架角度值。
信号在装置控制器和远程控制器中的一个或多个处接收。例如,信号可以在装置控制器处接收并且存储在装置控制器存储器中作为从该特定放射治疗机接收的信号的数据库/日志的一部分。装置控制器存储器还存储由装置控制器识别的任何故障的记录。
信号也可以在远程控制器处接收并且存储在远程控制器存储器中作为数据库的一部分。远程控制器和存储器被配置为分别访问和存储来自经由网络连接到远程控制器的多个放射治疗机的数据。所接收的信号可以采取各种形式。例如,信号可以定期地从台架旋转传感器接收。在该示例中,台架旋转传感器定期地(例如每4秒)将信号传送到装置控制器。替代性地,每当电压传感器将信号传送到装置控制器以提供对应于从由电压传感器提供的信号导出的电压值的台架角度值时,可以接收信号。这样,各个电压值被提供有对应的台架角度值。
在可选步骤960处,处理台架角度值。在优选实施例中,台架角度值的处理包括:确定台架的旋转是否已经满足至少一个第五阈值准则。可选地,这包括:确定台架的旋转是否超过阈值旋转度,例如90度。可选地,这包括:确定台架的旋转是否超过阈值旋转度,例如360度。
在步骤970处,至少基于电压值的处理,确定故障的性质是否与电子枪相关联。在示例中,如果上述步骤930(以及可选地940和960)的确定是肯定的,即如果电压值满足至少第一阈值准则(以及可选地,电压值满足至少第二阈值准则和/或台架的旋转已经满足至少第五阈值准则),则确定故障的性质与电子枪相关联。
在步骤980处,输出步骤970处的故障的性质是否与电子枪相关联的确定。这个步骤是可选的。输出确定可以包括:在显示屏上显示确定的指示。响应于该指示,可以在下一个可用的维修点或者在机器所有者方便的时间(例如在计划的机器停机时间期间)安排放射治疗装置的维护,以修复故障。输出确定还可以包括:向现场维修工程师发出详述确定的警报或通知。
警报可以包括关于如何识别电子枪的阴极的载体是否松动或是否存在枪体上的松动连接或枪隔离变压器的问题的信息。警报还可以包括如何修复这些问题。输出确定还可以包括:发出通信、警报或以其他方式联系放射治疗装置的所有者,以便将该问题通知给他们并且安排放射治疗装置的维护。
在示例中,一旦已经满足本文描述的并且在图9a和图9b的流程图中阐述的准则,则生成报告并且发出警报。然后,将该警报发送到相关维修团队,并且他们将计划放射治疗装置的维护。
在优选实施例中,装置控制器240从电压传感器和台架旋转传感器接收信号,并将它们传输到远程控制器260。中央控制器270接收信号,然后导出电压值和台架角度值。电压值可以通过从一段时间内的信号计算平均电压值来导出,确定传感器在该段时间内保持在相同的台架角度。将各个平均电压值和对应的台架角度值存储在中央控制器存储器270上。然后,当远程控制器260经由网络250访问中央存储器275时,对电压值和台架角度值进行处理。然而,图9a和图9b中显示的至少一些步骤,并且在一些示例中是所有步骤,可以在装置控制器240上执行。应当理解,装置控制器240、中央控制器270和远程控制器260的任何组合可以用于执行所公开的方法。
现在参考图10的流程图。流程图示出了如何生成步骤910中的故障通知。该过程识别电子枪中的短路或部分短路,短路或部分短路可以指示电子枪或电子枪的部件变松。
在步骤1010处,接收电流值。电流值从来自电流传感器的信号导出。电流值可以在任何特定情况下直接指示来自电流传感器的信号,并且可以随着来自电流传感器的信号变化而变化。为此,可以连续地更新电流值。
在步骤1020处,处理电流值。在优选实施例中,电流值的处理包括:确定电流值是否满足至少第三阈值准则。可选地,这包括:确定电流值已经下降到阈值电流值以下,例如1A以下。
在步骤1030处,接收电压值。电压值从来自电压传感器的信号导出。电压值可以在任何特定情况下直接指示来自电压传感器的信号,并且可以随着来自电压传感器的信号变化而变化。为此,可以连续地更新电压值。
在步骤1040处,处理电压值。在优选实施例中,电压值的处理包括:确定电压值是否满足至少第四阈值准则。可选地,这包括:确定电压值大于第二阈值电压值,例如大于35A。
在步骤1050处,当满足第三阈值准则和第四阈值准则中的一个或两个时,生成指示放射治疗装置中的故障的通知。例如,如果电流值已经下降到阈值电流值以下和/或电压值大于第二阈值电压值,则可以生成指示放射治疗装置中的故障的通知。满足第三阈值准则和第四阈值准则中的一个或两个可以指示电子枪或电子枪的部件变松并导致部分短路。
应当理解,虽然在图5、图8a、图8b、图9a、图9b和图10中阐述了特定顺序的步骤,但是这些步骤可以以不同的顺序执行。
以下编号的条款中阐述了本公开的示例。
1、一种确定是否应当安排放射治疗装置的维护的方法,放射治疗装置包括线性加速器并且被配置为向患者提供治疗辐射,放射治疗装置包括:
电流传感器,电流传感器被配置为提供指示供应给放射治疗装置的电子枪的电流的信号;和
真空管,该真空管包括:
电子枪;和
波导管,该波导管被配置为使由电子枪朝向靶发射的电子加速以产生所述辐射;
方法包括:
接收从由电流传感器提供的信号导出的电流值;
处理电流值以确定电流值是否满足至少第一阈值准则;
确定电子枪处于辐射模式的总时间量是否满足至少第二阈值准则;以及
如果满足第一阈值准则和第二阈值准则,则确定是否应当安排放射治疗装置的维护。
2、条款1的方法,其中,确定电流值是否满足第一阈值准则包括:确定电流值已降到阈值电流值以下,可选地,其中,阈值电流值为7.35A。
3、任一前述条款的方法,其中,电流值是在平均时间段内从电流传感器接收的信号的平均值,可选地,其中,平均时间段是一天。
4、任一前述条款的方法,其中,确定电子枪处于辐射模式的总时间量是否满足第二阈值准则包括:确定电子枪处于辐射模式的总时间量小于阈值时间段,可选地,其中,时间段是600小时。
5、任一前述条款的方法,还包括:输出是否应当安排放射治疗装置的维护的确定。
6、条款5的方法,其中,输出确定包括以下内容中的至少一项:在显示屏上显示确定的指示;向现场维修工程师发出详述确定的警报;和/或自动向放射治疗装置的所有者发出通知以安排放射治疗装置的维护。
7、任一前述条款的方法,放射治疗装置还包括压力传感器,压力传感器被配置为提供指示真空管内部的压力的信号,
方法还包括:
接收从来自压力传感器的信号导出的压力值,压力值指示真空管内部的压力;
处理压力值以确定压力值是否满足至少第三阈值准则;以及
如果满足第三阈值准则,则确定是否应当安排放射治疗装置的维护。
8、条款7的方法,其中,确定压力值是否满足第三阈值准则包括:确定压力值已经降到阈值压力值以下。
9、条款7或8的方法,其中,压力值是在平均时间段内从压力传感器接收的信号的平均值,可选地,其中,平均时间段是七天。
10、一种包括计算机可执行指令的计算机可读介质,这些计算机可执行指令在由处理器执行时,使得处理器执行任何前述条款的方法。
11、一种包括经由网络通信地耦合到中央控制器的远程控制器的系统,中央控制器被配置为从放射治疗装置接收数据,放射治疗装置包括线性加速器并且被配置为向患者提供治疗辐射,并且放射治疗装置包括:
电流传感器,电流传感器被配置为提供指示供应给放射治疗装置的电子枪的电流的信号;和
真空管,该真空管包括:
电子枪;和
波导管,该波导管被配置为使由电子枪朝向靶发射的电子加速以产生所述辐射,
其中,远程控制器耦合到包括计算机可执行指令的计算机可读介质,这些计算机可执行指令在由远程控制器执行时,使得远程控制器:
从中央控制器请求电流值;并且
执行条款1至6中任一项的方法。
12、条款11的系统,其中,放射治疗装置还包括压力传感器,压力传感器被配置为提供指示真空管的真空质量的信号,
其中,计算机可执行指令在由远程控制器执行时,还使得远程控制器执行条款1至9中任一项的方法。
13、一种确定放射治疗装置中的故障的性质的方法,放射治疗装置包括线性加速器并且被配置为向患者提供治疗辐射,放射治疗装置包括:
台架,该台架被配置为使真空管围绕患者旋转,使得辐射可以围绕患者从多个角度和/或方向被导向患者;
电压传感器,该电压传感器被配置为提供指示施加到放射治疗装置的电子枪的电压的信号;以及
真空管,该真空管包括:
电子枪;和
波导管,该波导管被配置为使由电子枪朝向靶发射的电子加速以产生所述辐射,方法包括:
接收从在台架的旋转期间由电压传感器提供的信号导出的电压值;
处理电压值,其中,处理电压值包括:确定电压值是否满足至少一个第一阈值准则;
以及
基于电压值的处理,确定故障的性质是否与电子枪相关联。
14、条款13的方法,其中,确定电压值是否满足至少一个第一阈值准则包括:确定电压值在台架的旋转期间是否变化了至少阈值量。
15、条款14的方法,其中,阈值量是0.2伏特。
16、任一前述条款的方法,其中,处理电压值还包括:通过确定电压值是否满足至少一个第二阈值准则来确定电子枪在台架的旋转期间是否处于待机模式。
17、条款16的方法,其中,确定电压值是否满足至少一个第二阈值准则包括:确定电压值是否小于第一阈值电压值。
18、条款17的方法,其中,第一阈值电压是15伏特。
19、任一前述条款的方法,放射治疗装置还包括台架旋转传感器,该台架旋转传感器被配置为提供指示台架已经旋转的程度的信号,
方法还包括:
接收从由台架旋转传感器针对各个所接收的电压值提供的信号导出的台架角度值,其中,各个台架角度值指示台架在生成各个电压值时被旋转的程度;以及
处理台架角度值以确定台架的旋转是否已经满足至少一个第五阈值准则。
20、条款19的方法,其中,确定台架的旋转是否已经满足第五阈值准则包括:确定台架的旋转是否超过阈值旋转度,可选地,其中,旋转度是90度。
21、任一前述条款的方法,还包括:输出故障的性质是否与电子枪相关联的确定。
22、条款21的方法,其中,输出确定包括以下内容中的至少一项:在显示屏上显示确定的指示;向现场维修工程师发出详述确定的警报;和/或自动向放射治疗装置的所有者发出通知以安排修理或更换。
23、任一前述条款的方法,还包括:接收或生成放射治疗装置中的故障的通知。
24、条款13至22中任一项的方法,放射治疗装置还包括电流传感器,电流传感器被配置为提供指示供应给电子枪的电流的信号,
方法还包括:
接收从由电流传感器提供的信号导出的电流值;
处理电流值,其中,处理电流值包括:确定电流值是否满足至少第三阈值准则;
接收从由传感器提供的信号导出的第二电压值;以及
处理第二电压值,其中,处理第二电压值包括:确定第二电压值是否满足至少第四阈值准则;
基于处理电流值和第二电压值,生成放射治疗装置中的故障的通知。
25、条款24的方法,其中,确定电流值是否满足至少第三阈值准则包括:确定电流值是否小于阈值电流,可选地,其中,阈值电流为1A。
26、条款24或25的方法,其中,确定第二电压值是否满足至少第四阈值准则包括:确定第二电压是否大于第二阈值电压,可选地,其中,第二电压阈值为35V。
27、一种包括经由网络通信地耦合到中央控制器的远程控制器的系统,中央控制器被配置为从放射治疗装置接收数据,放射治疗装置包括线性加速器并且被配置为向患者提供治疗辐射,并且放射治疗装置包括:
台架,该台架被配置为使真空管围绕患者旋转,使得辐射可以围绕患者从多个角度和/或方向被导向患者;
电压传感器,该电压传感器被配置为提供指示放射治疗装置的电子枪的电压的信号;以及
真空管,该真空管包括:
电子枪;和
波导管,该波导管被配置为使由电子枪朝向靶发射的电子加速以产生所述辐射,
其中,远程控制器耦合到包括计算机可执行指令的计算机可读介质,这些计算机可执行指令在由远程控制器执行时,使得远程控制器:
从中央控制器请求并接收从在台架的旋转期间由电压传感器提供的信号导出的电压值;并且
执行条款13至23中任一项的方法。
28、条款27的系统,其中,放射治疗装置还包括电流传感器,电流传感器被配置为提供指示供应给电子枪的电流的信号,
其中,计算机可执行指令在由远程控制器执行时,还使得远程控制器执行条款13至18以及21至26中任一项的方法。
29、条款27或28的系统,其中,放射治疗装置还包括台架旋转传感器,该台架旋转传感器被配置为提供指示台架已经旋转的程度的信号,
其中,计算机可执行指令在由远程控制器执行时,还使得远程控制器执行条款13至26中任一项的方法。
30、一种确定放射治疗装置中的故障的性质的方法,放射治疗装置包括线性加速器并且被配置为向患者提供治疗辐射,放射治疗装置包括:
电流传感器,该电流传感器被配置为提供指示施加到放射治疗装置的电子枪的电流的信号;
电压传感器,该电压传感器被配置为提供指示施加到电子枪的电压的信号;以及
真空管,该真空管包括:
电子枪;
波导管,该波导管被配置为使由电子枪朝向靶发射的电子加速以产生所述辐射,方法包括:
接收从由电流传感器提供的信号导出的电流值;
处理电流值,其中,处理电流值包括:确定电流值是否满足至少第一阈值准则;
接收从由传感器提供的信号导出的电压值;以及
处理电压值,其中,处理电压值包括:确定电压值是否满足至少第二阈值准则;
基于处理电流值和电压值,生成放射治疗装置中的故障的通知。
31、条款30的方法,其中,确定电流值是否满足至少第一阈值准则包括:确定电流值是否小于电流阈值,可选地,其中,电流阈值为1A。
32、条款30或31的方法,其中,确定电压值是否满足至少第二阈值准则包括:确定电压是否大于阈值电压值,可选地,其中,阈值电压值为35V。
33、一种包括经由网络通信地耦合到中央控制器的远程控制器的系统,中央控制器被配置为从放射治疗装置接收数据,放射治疗装置包括线性加速器并且被配置为向患者提供治疗辐射,并且放射治疗装置包括:
电流传感器,该电流传感器被配置为提供指示施加到放射治疗装置的电子枪的电流的信号;
电压传感器,该电压传感器被配置为提供指示电子枪的电压的信号;以及
真空管,该真空管包括:
电子枪;
波导管,该波导管被配置为使由电子枪朝向靶发射的电子加速以产生所述辐射,
其中,远程控制器耦合到包括计算机可执行指令的计算机可读介质,这些计算机可执行指令在由远程控制器执行时,使得远程控制器:
从中央控制器请求并接收从在台架的旋转期间由电压传感器提供的信号导出的电压值;并且
执行条款30至32中任一项的方法。
34、一种包括计算机可执行指令的计算机可读介质,这些计算机可执行指令在由处理器执行时,使得处理器执行任何条款的方法。
本公开的所有方法可以被描述为计算机实现的方法。如本文所述,电子枪的修理可包括更换阴极灯丝。因此,本技术描述了一种成本有效、高效且预测性的防止故障的方法。迄今为止,已经证明不可能确定服务中的电子枪的状态以便预测何时应当进行维护。本方法与现有方法相比节省了成本和时间,因为仅在需要时才执行为电子枪或放射治疗装置的其它部件的修理和更换的形式的维修和维护,并且由于减少或完全消除了通常与劣化的阴极丝相关联的安全中断的数量,并且还通过消除了在实现修理之前诊断问题所花费的时间,减少了装置的停机时间。
以上实现方式仅以示例的方式进行了描述,并且所描述的实现方式和布置在所有方面都应被认为仅是例示性的而非限制性的。应当理解,在不脱离本发明的范围的情况下,可以对所描述的实现方式和布置进行变化。
- 用于与放射治疗装置一起使用的方法
- 校准与放射治疗装置一起使用的患者监控系统的方法