一种快速定位方法及系统
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及半导体封装技术领域,尤其涉及一种快速定位方法及系统。
背景技术
电子封装装备如焊线机、倒装机、固晶机等是芯片制造中一个关键装备,其精密定位技术是芯片封装装备的关键技术。芯片首先是制作在芯片基板上,芯片基板上有众多相同的裸片,这些芯片就要通过封装装备来进行芯片金属点之间的连线封装,才能制造成可以导通使用的芯片。如在封装焊线过程中,焊线机Z轴运动系统需要完成快速精密的定位操作,这个运动过程需要满足当前该领域的技术要求是:大行程5-30mm;高速度0.2-1m/s;高加速度>10g;高精度1-2um以内。在倒装键合过程中,Z轴倒装操作头需要在1m/s速度、几十毫米行程内完成亚微米级精密定位。那么在这样的运动特征下,必然会产生定位过程的惯性振动。电子封装装备的操作头运动系统一般安装有操作头和操作头驱动部件,通过操作头带动焊球,操作头按照上述的运动参数,在芯片上方一定高度处高速向下运动接近芯片基板,将焊球与芯片链接在一起,完成封装键合过程。那么惯性振动一旦产生,可能会造成焊球撞击芯片,芯片损坏、裂缝、击碎、击穿等问题。
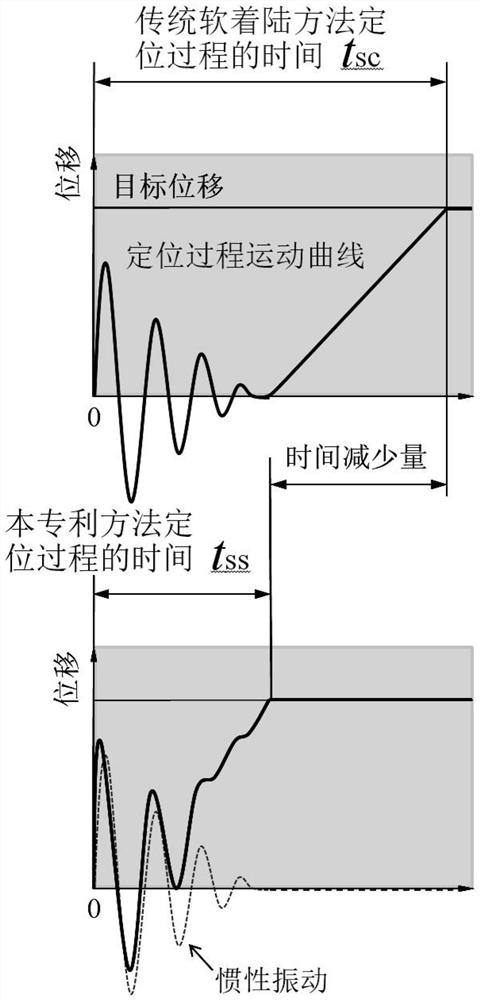
为了避免惯性振动引发上述封装制造问题,软着陆技术被提出并广泛应用在封装技术领域,参照图1和图2,传统软着陆方法的操作流程是:在接近芯片上方设置一个微小高度,这个高度通常为80-150um(称为搜索高度),操作头驱动部件带动操作头在芯片上方5-30mm高度处以高速高加速运动参数先向这个距离芯片80-150um的位置运动,并在这个位置进行定位,那么定位后的惯性振动就会在80-150um这个区间范围内来回震荡,不会接触到下面的芯片。这个80-150um的搜索高度可以容乃操作头的惯性振动,防止振动冲击或损伤芯片。随后,当惯性振动完全衰减、操作头稳定下来后,操作头驱动部件再一次启动,这次启动则按照非常低速的匀速运动启动(约5-25mm/s的速度),缓慢地在搜索高度80-150um的范围内逐步接近芯片,以低速均匀运动接触芯片可避免产生冲击、裂缝、击碎、击穿等问题,随后换成施力模式进行压焊球完成封装。当前,软着陆方法整个定位过程的时间约为50ms级,在当前芯片制造快速发展的时代背景下,对操作头封装共的工作提出了更高要求,减小定位过程的时间、提高操作效率成为不断追求的目标。
发明内容
本发明的目的在于提出一种快速定位方法及系统,适用于焊线机、倒装机、固晶机等电子封装装备软着陆定位过程,以减少封装装备操作头的定位时间,提高加工效率。
为达此目的,本发明采用以下技术方案:一种快速定位方法,包括以下步骤:
S1:获取操作头在封装装备传统软着陆过程中开始惯性振动的时刻t
S2:获取操作头在开始惯性振动时的实时振动位移值x和实时惯性振动速度值v;
S3:根据步骤S2得到的实时振动位移值x和实时惯性振动速度值v,计算出和实时时刻t有关的操作头的实时振动能量E;
S4:设定用于表示振动能量在惯性振动平衡位置完成衰减的预设值Δ,将计算的实时振动能量E与预设值Δ相比,反求当E=Δ时的时刻,将该时刻定义为t
S5:根据搜索高度H
S6:将步骤S5得到的均匀速度T
S7:操作头在软着陆过程中出现惯性振动时,操作头驱动部件持续向操作头施加步骤S6得到的均匀速度T
作为一种可选的实施方式,所述步骤S1根据公式(1)确定操作头发生惯性振动的启动时机;
其中,v
作为一种可选的实施方式,所述步骤S2采用公式(2)计算时刻t下操作头在惯性振动中的惯性振动位移,对公式(2)进行求导得到公式(3),利用公式(3)得出实时惯性振动速度值v;
公式(2)和公式(3)中,A是惯性振动振幅,ω是操作头运动系统的固有频率,ξ是操作头运动系统的阻尼系数,θ是相位角。
作为一种可选的实施方式,所述步骤S3采用公式(4)计算实时振动能量E;
公式(4)中,A是惯性振动振幅,ω是操作头运动系统的固有频率,ξ是操作头运动系统的阻尼系数,k是操作头运动系统得刚度,m是操作头运动系统的质量,θ是相位角。
作为一种可选的实施方式,所述步骤S4中预设值Δ大小为小于或等于本次惯性振动能量最大值的2%。
作为一种可选的实施方式,所述步骤S4通过公式(5)、(6)来预测惯性振动完成振动衰减的时刻t
公式(5)、(6)中,A是惯性振动振幅,ω是操作头运动系统的固有频率,ξ是操作头运动系统的阻尼系数,θ是相位角。
本发明还公开了一种快速定位系统,用于执行上述任一实施例的一种快速定位方法,包括操作头、操作头驱动部件、数据获取模块、设定模块、计算模块和判断选择模块;
所述数据获取模块用于获取操作头在传统的软着陆过程中惯性振动开始时的时刻t
所述设定模块用于设定用于表示振动能量在惯性振动平衡位置完成衰减的预设值Δ;
所述计算模块用于根据惯性振动实时位移值x和惯性振动实时速度值v,计算出操作头本次惯性振动过程与时刻t有关的实时振动能量E;所述计算模块用于调用设定的预设值Δ,将计算得到的实时振动能量E根据设定的预设值Δ继续计算出本次惯性振动能量E等于Δ时的时刻,该时刻定义为惯性振动完成衰减的时刻t
所述判断选择模块用于将所述计算模块得到的均匀速度T
所述操作头驱动部件用于在操作头在软着陆过程中出现惯性振动时,向操作头施加所述选择模块得到的均匀速度T
上述技术方案中的一个技术方案具有如下优点或有益效果:
先根据操作头在传统软着陆情况下,计算出操作头从惯性振动开始到振动衰退完成的时间内到达目标位置所需要的均匀速度T
进一步,均匀速度T
其中,值得说明的是,本发明还要求初始求出的均匀速度T
附图说明
附图对本发明做进一步说明,但附图中的内容不构成对本发明的任何限制。
图1是传统软着陆方法中操作头运动过程的示意图;
图2是本发明与传统软着陆方法的对比示意图;
图3是本发明计算操作头从惯性振动开始到振动衰退完成的时间内到达目标位置所需要的均匀速度T
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
下面结合图1至图3,描述本发明实施例的一种快速定位方法,包括以下步骤:
S1:获取操作头在封装装备传统软着陆过程中开始惯性振动的时刻t
S2:获取操作头在开始惯性振动时的实时振动位移值x和实时惯性振动速度值v;
S3:根据步骤S2得到的实时振动位移值x和实时惯性振动速度值v,计算出和实时时刻t有关的操作头的实时振动能量E;
S4:设定用于表示振动能量在惯性振动平衡位置完成衰减的预设值Δ,将计算的实时振动能量E与预设值Δ相比,反求当E=Δ时的时刻,将该时刻定义为t
S5:根据搜索高度H
S6:将步骤S5得到的均匀速度T
S7:操作头在软着陆过程中出现惯性振动时,操作头驱动部件持续向操作头施加步骤S6得到的均匀速度T
在本发明中,先根据操作头在传统软着陆情况下,确定操作头从惯性振动开始到振动衰退完成的时间内到达目标位置所需要的低速均匀速度T
进一步,均匀速度T
其中,值得说明的是,本发明还要求初始求出的均匀速度T
具体地,所述步骤S1根据公式(1)确定操作头发生惯性振动的启动时机;
其中,v
进一步,所述步骤S2采用公式(2)计算时刻t下操作头在惯性振动中的惯性振动位移,对公式(2)进行求导得到公式(3),利用公式(3)计算出实时惯性振动速度值v;
公式(2)和公式(3)中,A是惯性振动振幅,ω是操作头运动系统的固有频率,ξ是操作头运动系统的阻尼系数,θ是相位角。其中,操作头运动系统的固有频率、操作头运动系统的阻尼系数都能从封装装备操作头系统中查出。具体地,所述公式(2)为操作头在传统软着陆过程中,惯性振动位移的表达式,通过带入时刻t即可计算出时刻t下操作头的实时振动位移值x。同理,将时刻t带入公式(2)中即可计算出时刻t下操作头的实时惯性振动速度值v。
进一步,所述步骤S3采用公式(4)计算实时振动能量E;
公式(4)中,A是惯性振动振幅,ω是操作头运动系统的固有频率,ξ是操作头运动系统的阻尼系数,k是操作头运动系统得刚度,k是操作头运动系统得刚度,m是操作头运动系统的质量,θ是相位角。其中,操作头运动系统的固有频率、操作头运动系统的阻尼系数、操作头运动系统得刚度、操作头运动系统的质量都能从封装装备操作头系统中查出。如此,向公式4带入惯性振动振幅、操作头运动系统的固有频率、操作头运动系统的阻尼系数、相位角、操作头运动系统得刚度、操作头运动系统的质量即可计算出实时振动能量E。
值得说明的是,所述步骤S4中预设值Δ大小为小于或等于本次惯性振动能量最大值的2%。
所述步骤S4通过设定的预设值Δ、公式(5)、公式(6)来预测惯性振动完成振动衰减的时刻t
公式(5)、(6)中,A是惯性振动振幅,ω是操作头运动系统的固有频率,ξ是操作头运动系统的阻尼系数,θ是相位角。
本发明还公开了一种快速定位系统,用于执行上述一种快速定位方法,包括操作头、操作头驱动部件、数据获取模块、设定模块、计算模块和判断选择模块;
所述数据获取模块用于获取操作头在传统的软着陆过程中惯性振动开始时的时刻t
所述设定模块用于设定用于表示振动能量在惯性振动平衡位置完成衰减的预设值Δ;
所述计算模块用于根据惯性振动实时位移值x和惯性振动实时速度值v,计算出操作头本次惯性振动过程与时刻t有关的实时振动能量E;所述计算模块用于调用设定的预设值Δ,将计算得到的实时振动能量E根据设定的预设值Δ继续计算出本次惯性振动能量E等于Δ时的时刻,该时刻定义为惯性振动完成衰减的时刻t
所述判断选择模块用于将所述计算模块得到的均匀速度T
所述操作头驱动部件用于在操作头在软着陆过程中出现惯性振动时,向操作头施加所述选择模块得到的均匀速度T
在本系统中,先根据操作头在传统软着陆情况下,计算出操作头从惯性振动开始到振动衰退完成的时间内到达目标位置所需要的均匀速度T
进一步,均匀速度T
其中,值得说明的是,本发明还要求初始求出的均匀速度T
根据本发明实施例的一种快速定位方法及系统的其他构成等以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
在本说明书的描述中,参考术语“实施例”、“示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
- 一种机器人平面作业点快速定位系统及其快速定位方法
- 车辆故障快速定位分析系统及车辆故障快速定位分析方法