车辆安全作业控制方法、装置及系统、电子设备
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及工程机械控制技术领域,尤其是涉及一种车辆安全作业控制方法、装置及系统、电子设备。
背景技术
绝缘斗臂车为一种在交通方便且布线复杂的场合进行等电位作业的特殊车辆。绝缘斗臂车在带电作业过程中,上装(即底盘以上部分)的臂架以及工作斗需要与高压线路保持一个安全的作业距离,以保证作业的安全。不同电压等级的线路的安全作业距离不一致。作业环境中的物体种类很多,形状各异、材料不同,并且有些是不带电的、有些是带电的,不带电的物体不需要安全作业距离。
为了实现无人化/自动化的作业,智能移动的绝缘斗臂车必须通过自主计算来判断作业过程中是否在危险距离内。然而对于如何保证绝缘斗臂车带电作业过程中与带电体之间的安全距离的技术问题,目前业界尚未提出相关的解决办法。
发明内容
本发明的目的在于提供一种车辆安全作业控制方法、装置及系统、电子设备,以保证车辆带电作业过程中与带电体之间的安全距离,从而提升车辆的智能度。
第一方面,本发明实施例提供了一种车辆安全作业控制方法,包括:
对车辆的作业环境进行物体识别,得到至少一个目标物体的类别和位置信息;所述至少一个目标物体包括至少一个带电的物体;
对于所述至少一个目标物体中的每个目标物体,当根据该目标物体的类别确定该目标物体带电时,根据该目标物体的类别和位置信息,对该目标物体进行相应安全距离的膨胀处理,得到该目标物体的膨胀后位置信息;
根据所述至少一个目标物体中带电的各个目标物体的膨胀后位置信息和不带电的各个目标物体的位置信息,生成障碍物的位置信息;
根据所述障碍物的位置信息进行所述车辆的路径规划,得到避障路径,以使所述车辆基于所述避障路径进行安全作业。
进一步地,对车辆的作业环境进行物体识别,得到至少一个目标物体的类别和位置信息的步骤,包括:
对车辆的作业环境进行三维建模,得到所述作业环境的三维点云;
根据所述三维点云的属性信息,对所述三维点云进行分割处理,得到至少一个由点云构成的目标物体和每个所述目标物体的位置信息;其中,所述属性信息包括颜色信息和反射强度信息,所述位置信息包括定位坐标和几何方程;
根据每个所述目标物体对应的点云的属性信息和几何方程,确定该目标物体的类别。
进一步地,根据所述三维点云的属性信息,对所述三维点云进行分割处理,得到至少一个由点云构成的目标物体和每个所述目标物体的位置信息的步骤,包括:
根据所述三维点云的属性信息,对所述三维点云进行聚类分割处理,得到至少一个由点云构成的初始物体;
基于随机采样一致性算法对各个所述初始物体进行分割处理,得到至少一个目标物体和每个所述目标物体的位置信息。
进一步地,根据该目标物体的类别和位置信息,对该目标物体进行相应安全距离的膨胀处理,得到该目标物体的膨胀后位置信息的步骤,包括:
根据该目标物体的类别,查询得到该目标物体的电压;
确定与该目标物体的电压对应的目标安全距离;
根据该目标物体的位置信息,对该目标物体进行所述目标安全距离的膨胀处理,得到该目标物体的膨胀后位置信息。
进一步地,根据该目标物体的位置信息,对该目标物体进行所述目标安全距离的膨胀处理,得到该目标物体的膨胀后位置信息的步骤,包括:
对于该目标物体对应的点云中的每个点,确定该目标物体对应的点云在该点的法线方向,并计算将该点在所述法线方向上移动所述目标安全距离后的位置坐标,得到该点对应的膨胀坐标;
根据该目标物体对应的点云中的各个点对应的膨胀坐标,确定该目标物体的膨胀后位置信息。
进一步地,确定该目标物体对应的点云在该点的法线方向的步骤,包括:
根据该目标物体的位置信息,获取该点对应的协方差矩阵;
获取所述协方差矩阵的特征值的最小值;
将所述最小值对应的特征向量确定为该目标物体对应的点云在该点的法线方向。
进一步地,所述方法还包括:
在所述车辆基于所述避障路径进行安全作业的过程中,根据所述障碍物的位置信息,对所述车辆的臂架进行障碍物碰撞检测;
当检测到所述车辆的臂架处于所述障碍物的位置信息对应的区域时,控制所述车辆停止工作。
第二方面,本发明实施例还提供了一种车辆安全作业控制装置,包括:
识别模块,用于对车辆的作业环境进行物体识别,得到至少一个目标物体的类别和位置信息;所述至少一个目标物体包括至少一个带电的物体;
处理模块,用于对于所述至少一个目标物体中的每个目标物体,当根据该目标物体的类别确定该目标物体带电时,根据该目标物体的类别和位置信息,对该目标物体进行相应安全距离的膨胀处理,得到该目标物体的膨胀后位置信息;
生成模块,用于根据所述至少一个目标物体中带电的各个目标物体的膨胀后位置信息和不带电的各个目标物体的位置信息,生成障碍物的位置信息;
规划模块,用于根据所述障碍物的位置信息进行所述车辆的路径规划,得到避障路径,以使所述车辆基于所述避障路径进行安全作业。
第三方面,本发明实施例还提供了一种电子设备,包括存储器、处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一方面的车辆安全作业控制方法。
第四方面,本发明实施例还提供了一种车辆安全作业控制系统,包括绝缘斗臂车和上述第三方面的电子设备;所述电子设备用于为所述绝缘斗臂车提供避障路径。
本发明实施例提供的车辆安全作业控制方法、装置及系统、电子设备中,该方法包括:对车辆的作业环境进行物体识别,得到至少一个目标物体的类别和位置信息;该至少一个目标物体包括至少一个带电的物体;对于该至少一个目标物体中的每个目标物体,当根据该目标物体的类别确定该目标物体带电时,根据该目标物体的类别和位置信息,对该目标物体进行相应安全距离的膨胀处理,得到该目标物体的膨胀后位置信息;根据该至少一个目标物体中带电的各个目标物体的膨胀后位置信息和不带电的各个目标物体的位置信息,生成障碍物的位置信息;根据障碍物的位置信息进行车辆的路径规划,得到避障路径,以使车辆基于该避障路径进行安全作业。这样通过对带电的各个目标物体进行相应安全距离的膨胀处理,使得在路径规划时考虑了带电的目标物体所需安全距离的影响,因此保证了车辆带电作业过程中与带电体之间的安全距离,从而提升了车辆的智能度。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
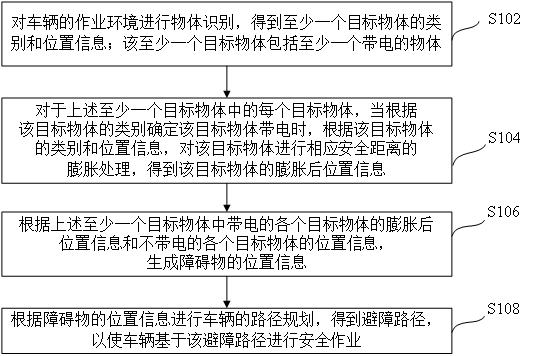
图1为本发明实施例提供的一种车辆安全作业控制方法的流程示意图;
图2为本发明实施例提供的一种作业环境的三维点云图;
图3为本发明实施例提供的一种表面法线估计的示意图;
图4为本发明实施例提供的一种行线的膨胀效果示意图;
图5为本发明实施例提供的另一种车辆安全作业控制方法的流程示意图;
图6为本发明实施例提供的一种车辆安全作业控制装置的结构框图;
图7为本发明实施例提供的一种电子设备的结构示意图;
图8为本发明实施例提供的一种车辆安全作业控制系统的结构框图;
图9为本发明实施例提供的一种绝缘斗臂车的外观示意图;
图10为本发明实施例提供的一种环境感知模块的外观示意图。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
对于如何保证绝缘斗臂车带电作业过程中与带电体之间的安全距离的技术问题,有两种解决思路,一种思路是在绝缘斗臂车的各个关节安装距离传感器,如果进入危险距离内,则告警并进行危险处理。这个方法存在的问题包括:距离传感器覆盖的空间有限,并不能保证所有情况都检测出来;路径规划时没有考虑安全距离的问题,会出现规划出来的路径在危险距离内的问题。
另一种思路是进行绝缘斗臂车的各个关节的膨胀,这个方法的局限在于在碰撞检测时容易出现自碰撞,以及碰撞距离对场景(作业环境)中的所有物体无差别处理,与实际的作业要求不符,并影响了绝缘斗臂车的作业空间。
基于此,本发明实施例提供的一种车辆安全作业控制方法、装置及系统、电子设备,路径规划时考虑安全距离的问题,且作业环境中的不同物体对应不同的安全距离,因此不需要增加额外的硬件设备及成本,就可以保证车辆带电作业过程中与带电体之间的安全距离,并且概率完备性高(即可以保证检测出碰撞),从而提升了车辆的智能度。
为便于对本实施例进行理解,首先对本发明实施例所公开的一种车辆安全作业控制方法进行详细介绍。
本发明实施例提供了一种车辆安全作业控制方法,该方法可以由具有数据处理能力的电子设备执行,该电子设备可以是笔记本电脑、平板电脑、车载电脑或智能手机等。该方法不限于应用于绝缘斗臂车,在其他实施例中,该方法也可以应用于除绝缘斗臂车外的其他专项作业车。
参见图1所示的一种车辆安全作业控制方法的流程示意图,该方法主要包括如下步骤S102~步骤S108:
步骤S102,对车辆的作业环境进行物体识别,得到至少一个目标物体的类别和位置信息;该至少一个目标物体包括至少一个带电的物体。
这里的车辆可以是绝缘斗臂车,也可以是其他专项作业车。在一些可能的实施例中,上述步骤S102可以通过如下子步骤1~子步骤3实现:
子步骤1,对车辆的作业环境进行三维建模,得到作业环境的三维点云。
可选地,可以获取设置在车辆上的环境感知模块采集的在车辆的坐标系下的建模数据,基于该建模数据进行三维建模,并对建模获取的点云进行直通滤波、下采样和离群处理的预处理,得到作业环境的三维点云;其中,该环境感知模块可以由激光雷达和深度相机构成。
子步骤2,根据三维点云的属性信息,对该三维点云进行分割处理,得到至少一个由点云构成的目标物体和每个目标物体的位置信息;其中,该属性信息包括颜色信息和反射强度信息,该位置信息包括定位坐标和几何方程。
可选地,可以根据三维点云的属性信息,对该三维点云进行聚类分割处理,得到至少一个由点云构成的初始物体;基于随机采样一致性(Random Sample Consensus)算法对各个初始物体进行分割处理,得到至少一个目标物体和每个目标物体的位置信息。
以车辆为绝缘斗臂车为例,作业环境中的目标物体有很多种类,可能有行线、横担、柱上开关、瓷瓶、避雷器、电线杆和引线等中的一种或多种。对于目标物体的位置信息,行线可以通过起点坐标、直线方程和终点坐标表示其位置信息;瓷瓶为圆柱体,瓷瓶可以通过底面中心点坐标、底面半径、高度和轴线方向表示其位置信息。
子步骤3,根据每个目标物体对应的点云的属性信息和几何方程,确定该目标物体的类别。
目标物体的类别包括行线、横担、柱上开关、瓷瓶、避雷器、电线杆和引线等中的一种或多种。根据分割以后点云的颜色信息、反射强度信息以及几何方程,识别不同的物体,例如行线是黑色的,低反射强度;瓷瓶是白色的,反射强度比较高;双回路中行线的直线方程的方向向量中的Z方向分量接近于0。
为了便于理解,参见图2所示的一种作业环境的三维点云图,该三维点云中存在的目标物体包括行线201(电压为10KV)、避雷器202、横担203、引线204和电线杆205。
步骤S104,对于上述至少一个目标物体中的每个目标物体,当根据该目标物体的类别确定该目标物体带电时,根据该目标物体的类别和位置信息,对该目标物体进行相应安全距离的膨胀处理,得到该目标物体的膨胀后位置信息。
目标物体可以分为两大类,一类是带电的,一类是不带电的。例如,行线、横担、柱上开关、避雷器和引线均为带电体(即带电的物体),车辆作业过程中需要与这些带电体保持一定的安全距离,因此这些物体需要进行点云的膨胀处理;瓷瓶和电线杆均不带电,车辆作业过程中不需要与不带电的物体保持安全距离,因此这些物体不需要进行点云的膨胀处理。
在双回路场景中,一般存在着两个电压,电压不一样,要求的安全距离不一样,譬如10KV的物体要求安全距离为0.4m,电压越高,则要求的安全距离越远。基于此,上述步骤S104可以通过如下过程实现:根据该目标物体的类别,查询得到该目标物体的电压;确定与该目标物体的电压对应的目标安全距离;根据该目标物体的位置信息,对该目标物体进行目标安全距离的膨胀处理,得到该目标物体的膨胀后位置信息。
在对目标物体进行目标安全距离的膨胀处理时,可以直接通过得到目标物体的几何方程,进行目标安全距离的点云膨胀。然而,考虑到作业场景中的物体,大多是不规则的形状,即使是看起来比较简单的行线,也不是简单的圆柱体,其扫描中心线是高次曲线,因此为了使目标物体点云膨胀后的表面形状与目标物体的本身表面形状更加契合,可以先进行点云的表面法线估计,然后在法线方向上移动相应的安全距离,从而实现点云的膨胀,也即通过如下过程对目标物体进行目标安全距离的膨胀处理:对于目标物体对应的点云中的每个点,确定该目标物体对应的点云在该点的法线方向,并计算将该点在该法线方向上移动目标安全距离后的位置坐标,得到该点对应的膨胀坐标;根据该目标物体对应的点云中的各个点对应的膨胀坐标,确定该目标物体的膨胀后位置信息。其中,该目标物体的膨胀后位置信息可以由该目标物体对应的点云中的各个点对应的膨胀坐标构成。
为了提高计算效率,可以通过如下过程确定目标物体对应的点云在该点的法线方向:根据该目标物体的位置信息,获取该点对应的协方差矩阵;获取该协方差矩阵的特征值的最小值;将该最小值对应的特征向量确定为该目标物体对应的点云在该点的法线方向。
参见图3所示的一种表面法线估计的示意图,点云构成的表面301上的点P的法线方向302,也是表面301在点P的相切面303的法线方向302,这样确定表面一点法线问题近似于估计表面的一个相切面法线的问题,因此变成一个最小二乘法平面拟合的估计问题,可以通过PCA(Principal Component Analysis,主成分分析)分析一个协方差矩阵的特征矢量和特征值,得到法线方向。
具体地,对于目标物体对应的点云中的任一个点
其中,
对于点
行线在横截面处的膨胀后效果如图4所示,其中,内部的圆形实线为实际轮廓,外部的圆形虚线为膨胀后的轮廓,箭头所对应的距离等于该行线对应的安全距离。
步骤S106,根据上述至少一个目标物体中带电的各个目标物体的膨胀后位置信息和不带电的各个目标物体的位置信息,生成障碍物的位置信息。
本申请中对带电的各个目标物体对应的膨胀处理后的点云和不带电的各个目标物体对应的点云进行合并,组成一个带安全距离的点云,并由该带安全距离的点云生成障碍物。
步骤S108,根据障碍物的位置信息进行车辆的路径规划,得到避障路径,以使车辆基于该避障路径进行安全作业。
具体的路径规划方法可以参照相关现有技术,这里不再赘述。
另外,执行上述车辆安全作业控制方法的电子设备可以设置在车辆上,在此基础上,为了进一步保证车辆的安全作业,该方法还包括:在车辆基于避障路径进行安全作业的过程中,根据障碍物的位置信息,对车辆的臂架进行障碍物碰撞检测;当检测到车辆的臂架处于障碍物的位置信息对应的区域时,控制车辆停止工作。
本发明实施例提供的车辆安全作业控制方法,通过对带电的各个目标物体进行相应安全距离的膨胀处理,使得在路径规划时考虑了带电的目标物体所需安全距离的影响,因此可以保证车辆带电作业过程中与带电体之间的安全距离,从而有利于扫除车辆无人化作业的安全障碍,提升车辆的智能度。
为了便于理解,本发明实施例对图1所示流程的步骤进行了细化,参见图5所示的另一种车辆安全作业控制方法的流程示意图,该方法主要包括如下步骤:
步骤S502,对作业环境进行三维建模。
步骤S504,对建模得到的点云进行预处理。
步骤S506,进行点云分割。
步骤S508,进行点云识别。
步骤S510,计算膨胀的安全距离。
步骤S512,进行点云膨胀。
步骤S514,生成障碍物。
步骤S516,进行路径规划。
步骤S518,在车辆的作业过程中进行碰撞检测。
图5所示的各个步骤的具体过程可以参见前述的相应内容,这里不再赘述。
综上,本发明实施例提供的车辆安全作业控制方法具有如下有益效果:
1)在路径规划时考虑安全距离的影响,保证了车辆进行自主作业的安全距离;
2)不需要增加额外的硬件设备以及成本,并且概率完备性高;
3)计算效率高,不需要做过多的前期准备工作;
4)不同的物体产生不同的安全距离,并且物体膨胀后的表面形状与物体的实际表面形状严格契合,产生的安全距离非常精准。
对应于上述的车辆安全作业控制方法,本发明实施例还提供了一种车辆安全作业控制装置,参见图6所示的一种车辆安全作业控制装置的结构框图,该装置包括:
识别模块62,用于对车辆的作业环境进行物体识别,得到至少一个目标物体的类别和位置信息;该至少一个目标物体包括至少一个带电的物体;
处理模块64,用于对于上述至少一个目标物体中的每个目标物体,当根据该目标物体的类别确定该目标物体带电时,根据该目标物体的类别和位置信息,对该目标物体进行相应安全距离的膨胀处理,得到该目标物体的膨胀后位置信息;
生成模块66,用于根据上述至少一个目标物体中带电的各个目标物体的膨胀后位置信息和不带电的各个目标物体的位置信息,生成障碍物的位置信息;
规划模块68,用于根据上述障碍物的位置信息进行车辆的路径规划,得到避障路径,以使该车辆基于该避障路径进行安全作业。
本发明实施例提供的车辆安全作业控制装置,通过对带电的各个目标物体进行相应安全距离的膨胀处理,使得在路径规划时考虑了带电的目标物体所需安全距离的影响,因此可以保证车辆带电作业过程中与带电体之间的安全距离,从而有利于扫除车辆无人化作业的安全障碍,提升车辆的智能度。
进一步,上述识别模块62具体用于:对车辆的作业环境进行三维建模,得到作业环境的三维点云;根据三维点云的属性信息,对三维点云进行分割处理,得到至少一个由点云构成的目标物体和每个目标物体的位置信息;其中,属性信息包括颜色信息和反射强度信息,位置信息包括定位坐标和几何方程;根据每个目标物体对应的点云的属性信息和几何方程,确定该目标物体的类别。
进一步,上述识别模块62还用于:根据三维点云的属性信息,对该三维点云进行聚类分割处理,得到至少一个由点云构成的初始物体;基于随机采样一致性算法对各个初始物体进行分割处理,得到至少一个目标物体和每个目标物体的位置信息。
进一步,上述处理模块64具体用于:根据该目标物体的类别,查询得到该目标物体的电压;确定与该目标物体的电压对应的目标安全距离;根据该目标物体的位置信息,对该目标物体进行目标安全距离的膨胀处理,得到该目标物体的膨胀后位置信息。
进一步,上述处理模块64还用于:对于目标物体对应的点云中的每个点,确定该目标物体对应的点云在该点的法线方向,并计算将该点在该法线方向上移动目标安全距离后的位置坐标,得到该点对应的膨胀坐标;根据该目标物体对应的点云中的各个点对应的膨胀坐标,确定该目标物体的膨胀后位置信息。
进一步,上述处理模块64还用于:根据该目标物体的位置信息,获取该点对应的协方差矩阵;获取该协方差矩阵的特征值的最小值;将该最小值对应的特征向量确定为该目标物体对应的点云在该点的法线方向。
进一步,上述装置还包括:
检测模块,用于在车辆基于避障路径进行安全作业的过程中,根据障碍物的位置信息,对车辆的臂架进行障碍物碰撞检测;
控制模块,用于当检测到车辆的臂架处于障碍物的位置信息对应的区域时,控制车辆停止工作。
本实施例所提供的装置,其实现原理及产生的技术效果和前述方法实施例相同,为简要描述,装置实施例部分未提及之处,可参考前述方法实施例中相应内容。
本发明实施例还提供了一种电子设备,参见图7所示的一种电子设备的结构示意图,该电子设备82,包括:处理器70,存储器71,总线72和通信接口73,所述处理器70、通信接口73和存储器71通过总线72连接;处理器70用于执行存储器71中存储的可执行模块,例如计算机程序。
其中,存储器71可能包含随机存取存储器(Random Access Memory,简称RAM),也可能还包括非易失性存储器(non-volatile memory,简称NVM),例如至少一个磁盘存储器。通过至少一个通信接口73(可以是有线或者无线)实现该系统网元与至少一个其他网元之间的通信连接,可以使用互联网,广域网,本地网,城域网等。
总线72可以是工业标准体系结构(Industry Standard Architecture,简称ISA)总线、外设部件互连标准(Peripheral Component Interconnect,简称PCI)总线或扩展工业标准结构(Extended Industry Standard Architecture,简称EISA)总线等。所述总线可以分为地址总线、数据总线、控制总线等。为便于表示,图7中仅用一个双向箭头表示,但并不表示仅有一根总线或一种类型的总线。
其中,存储器71用于存储程序,所述处理器70在接收到执行指令后,执行所述程序,前述本发明实施例任一实施例揭示的流程定义的装置所执行的方法可以应用于处理器70中,或者由处理器70实现。
处理器70可能是一种集成电路芯片,具有信号的处理能力。在实现过程中,上述方法的各步骤可以通过处理器70中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器70可以是通用处理器,包括中央处理器(Central Processing Unit,简称CPU)、网络处理器(Network Processor,简称NP)等;还可以是数字信号处理器(Digital SignalProcessing,简称DSP)、专用集成电路(Application Specific Integrated Circuit,简称ASIC)、现成可编程门阵列(Field-Programmable Gate Array,简称FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。可以实现或者执行本发明实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。结合本发明实施例所公开的方法的步骤可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器71,处理器70读取存储器71中的信息,结合其硬件完成上述方法的步骤。
本发明实施例还提供了一种车辆安全作业控制系统,参见图8所示的一种车辆安全作业控制系统的结构框图,该车辆安全作业控制系统包括绝缘斗臂车84和上述的电子设备82;电子设备82用于为绝缘斗臂车84提供避障路径。
上述电子设备82可以设置在绝缘斗臂车84上,作为绝缘斗臂车84的主控系统,绝缘斗臂车84的外观可以如图9所示。绝缘斗臂车84的臂架上可以设置如图10所示的环境感知模块,该环境感知模块与电子设备82连接,该环境感知模块可以由激光雷达和深度相机构成。在绝缘斗臂车84作业前,首先使用环境感知模块采集作业环境的建模数据,并将该建模数据发送至电子设备82;电子设备82基于该建模数据最终得到避障路径,并基于该避障路径控制绝缘斗臂车84的作业过程,且在绝缘斗臂车84的作业过程中通过环境感知模块进行碰撞检测,如果检测到碰撞,则控制绝缘斗臂车84立即急停。
本实施例所提供的系统,其实现原理及产生的技术效果和前述方法实施例相同,为简要描述,系统实施例部分未提及之处,可参考前述方法实施例中相应内容。
另外,本发明实施例还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行前面方法实施例中所述的车辆安全作业控制方法。该计算机可读存储介质包括:U盘、移动硬盘、只读存储器(Read-OnlyMemory,简称ROM)、RAM、磁碟或者光盘等各种可以存储程序代码的介质。
在这里示出和描述的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制,因此,示例性实施例的其他示例可以具有不同的值。
附图中的流程图和框图显示了根据本发明的多个实施例的系统、方法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,流程图或框图中的每个方框可以代表一个模块、程序段或代码的一部分,所述模块、程序段或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。也应当注意,在有些作为替换的实现中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。例如,两个连续的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这依所涉及的功能而定。也要注意的是,框图和/或流程图中的每个方框、以及框图和/或流程图中的方框的组合,可以用执行规定的功能或动作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。
在本申请所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,又例如,多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些通信接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 车辆安全作业控制方法、装置及系统、电子设备
- 燃料电池车辆的氢系统安全控制方法及装置、电子设备及车辆