一种导弹运挂一体车的电静液驱动装置
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及导弹运输挂装的技术领域,特别是一种导弹运挂一体车的电静液驱动装置。
背景技术
目前,国内外导弹运挂一体车拖弹架升降普遍采用主机的动力源和液压源,通过液压管路连接液压阀、液压缸,组成阀控液压缸的开式节流调速回路。如申请号为CN206530564U公开了一种液压缸差动回路阀及液压缸开式/闭式差动回路,包括补油模块:设置在泵吸油口,用于防止液压泵吸空;流量漏出模块:用于将液压缸多余的流量流回油箱;安全模块:用于限制液压缸有杆腔和无杆腔的最高压力;换向模块:用于实现油缸方向的转变,还提供一种包括所述液压缸差动回路阀的液压缸开式差动回路和液压缸闭式差动回路开式节流调速回路,但是这种开式回路不仅效率低、发热大需要庞大的液压油箱、冷却器散热,而且还需要繁杂的液压管路将主机上的液压泵、液压阀、液压油箱、冷却器、油液缸等连接在一起,组成阀控液压缸的开式节流调速回路,不仅使得液压系统效率低,而且系统较为庞杂、泄漏点多,大大降低了导弹运挂一体车可靠性的同时也增加了部队日常维护和保障的压力。
发明内容
本发明的目的在于克服现有技术的缺点,提供能力密度大、传动效率高、维修性及可靠性强、体积小的一种导弹运挂一体车的电静液驱动装置。
本发明的目的通过以下技术方案来实现:一种导弹运挂一体车的电静液驱动装置,包括液压油缸,所述液压油缸的上端从左到右依次设置有压力油箱、集成阀组、柱塞泵和电机,液压油缸的尾端设置有位置传感器,所述电机的输出轴和柱塞泵连接,所述柱塞泵左端和集成阀组右端连接,所述集成阀组的左端和压力油箱连接,所述压力油箱和液压油缸连通;所述柱塞泵有两个油口,分别为油口A和油口B。
优选的,所述集成阀组包括溢流阀、单向阀、过滤器、液控单向阀、截止阀、平衡阀、节流阀和单向节流阀,所述平衡阀设置在液压油缸的有杆腔和柱塞泵之间,且平衡阀上还通过截止阀、过滤器、单向阀A和单向阀B并联有压力油箱,所述单向节流阀设置在液压油缸的无杆腔和柱塞泵之间,所述单向节流阀和平衡阀通过液控单向阀A、液控单向阀B和节流阀相连接,所述溢流阀有两个,分别设置在柱塞泵的油口A和油口B上。
优选的,所述集成阀组上设置有多个压力传感器。
优选的,所述过滤器和单向阀A串联,且串联后的整体与单向阀B并联。
优选的,所述压力传感器有三个,其中两个分别设置在柱塞泵的油口A和油口B上,剩余的一个设置在压力油箱上。
优选的,所述液控单向阀A和液控单向阀B串联。
优选的,所述液控单向阀B和节流阀并联。
本发明具有以下优点:采用集成化、模块化设计,将电机、柱塞泵、液压油箱、集成阀组与液压油缸集成在一起组成泵控液压缸的闭式容积调速回路,不需要主机提供液压动力源、油箱、冷却器和液压管道等,不仅减小了装置体积,还可实现导弹运挂一体车托弹架的升降速度大范围内无级可调、位移精确控制,并具有能量密度大、传动效率高、维修性及可靠性强的优点,可大幅度提升导弹挂装时的工作效率,缩短战斗准备时间。
附图说明
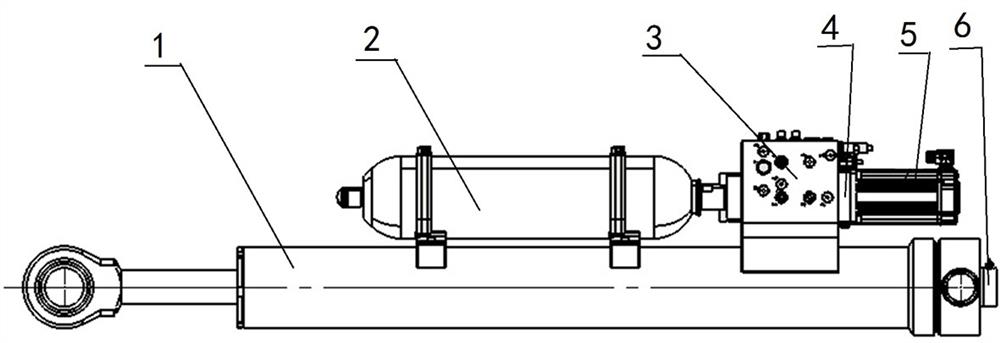
图1 为本发明的结构示意图;
图2 为本发明的油路结构示意图;
图中:1-液压油缸,2-压力油箱,3-集成阀组,4-柱塞泵,5-电机,6-位置传感器,7-溢流阀,8-压力传感器,9-单向阀A,10-过滤器,11-单向阀B,12-截止阀,13-平衡阀,14-节流阀,15-单向节流阀,16-液控单向阀A,17-液控单向阀B。
具体实施方式
下面结合附图对本发明做进一步的描述,但本发明的保护范围不局限于以下所述。
如图1所示,一种导弹运挂一体车的电静液驱动装置,包括液压油缸1,所述液压油缸1的上端从左到右依次设置有压力油箱2、集成阀组3、柱塞泵4和电机5,液压油缸1的尾端设置有位置传感器6,所述电机5的输出轴和柱塞泵4连接,所述柱塞泵4左端和集成阀组3右端连接,所述集成阀组3的左端和压力油箱2连接,所述压力油箱2和液压油缸1连通;所述柱塞泵4有两个油口,分别为油口A和油口B。
如图2所示,所述集成阀组3包括溢流阀7、单向阀、过滤器10、液控单向阀、截止阀12、平衡阀13、节流阀14和单向节流阀15,所述平衡阀13设置在液压油缸1的有杆腔和柱塞泵4之间,且平衡阀13上还通过截止阀12、过滤器10、单向阀A9和单向阀B11并联有压力油箱2,所述单向节流阀15设置在液压油缸1的无杆腔和柱塞泵4之间,所述单向节流阀15和平衡阀13通过液控单向阀A16、液控单向阀B17和节流阀14相连接,所述溢流阀7有两个,分别设置在柱塞泵4的油口A和油口B上,用于保证柱塞泵4的进出油压力的稳定。
优选的,所述集成阀组3上设置有多个压力传感器8。
优选的,所述过滤器10和单向阀A9串联,且串联后的整体与单向阀B11并联。
优选的,所述压力传感器8有三个,其中两个分别设置在柱塞泵4的油口A和油口B上,剩余的一个设置在压力油箱2上。
优选的,所述液控单向阀A16和液控单向阀B17串联。
优选的,所述液控单向阀B17和节流阀14并联。
本发明的工作过程如下:举升工况,即液压油缸1活塞杆缩回时,电机5驱动柱塞泵4正向旋转,压力油经平衡阀13进入液压油缸1的有杆腔,液压油缸1的无杆腔中的压力油经单向节流阀15和液控单向阀B17及单向阀B11返回压力油箱2,液压油缸1的活塞杆缩回,并依靠平衡阀13控制压力油流动的体积来实现液压油缸1的活塞杆保持在任意位置,整个过程中可通过位置传感器6检测位移,检测偏差并修正偏差实现位置闭环控制。
下放工况,即液压油缸1活塞杆伸出时,电机5驱动柱塞泵4反向旋转,柱塞泵4的油口A从压力油箱2吸压力油,压力油通过过滤器10、单向阀A9和液控单向阀A16从压力油箱2流向柱塞泵4的油口A,压力油从柱塞泵4的油口B流出,压力油流过节流阀14打开平衡阀13,同时压力油流过单向节流阀15进入液压油缸1的无杆腔中,推动活塞杆伸出,液压油缸1的有杆腔中的压力油通过平衡阀13回油至柱塞泵4的油口A。
应急手动下放,即液压油缸1的活塞杆伸出,当压力传感器8检测到油路压力过高时,需应急手动下放,松开截止阀12,液压油缸1的有杆腔中的压力油通过截止阀12、液控单向阀B17和节流阀14流至液压油缸1的无杆腔中,同时压力油箱2中的压力油通过过滤器10、单向阀A9、液控单向阀B17和节流阀14流至液压油缸1的无杆腔中,推动活塞杆伸出。
- 一种导弹运挂一体车的电静液驱动装置
- 一种导弹运挂一体车的电静液驱动装置